1
Изобретение относится к области электротехники, в частности к шаговым электродвигателям, которые широко используются для прнвода различных счетных механизмов импульсиого действия.
Известны шаговые электродвигатели, содержаш,ие статор с четырьмя полюсами, постоянным магнитом и катушками обмотки управления и зубчатый ротор ,1.
Известный двигатель из-за тангенциальиого расположения оси намагниченности постоянного магнита по отношению к ротору имеет сложную конструкцию и большие габариты.
Известен двигатель с тремя зубчатыми иолюсами на статоре и с постоянным магнитом, расноложенным на среднем полюсе, катушки обмотки управления которого устаиовлеиы на крайних полюсах, при этом ротор имеет зубцы, обращенные к статору 2. Однако и этот двигатель сложен в изготовлении из-за наличия зубцов на полюсных выступах .
Целью изобретения является уменьшение габаритов и упрощение конструкции электродвигателя.
Цель достигается тем, что ширина зубцов ротора выполнена равной ширине пазов
между ними, а ширина крайних полюсов статора вдвое меньше ширины его среднего полюса, ширина которого выполнена равной ширинезубцов ротора, нричем расстояние между крайними полюсами статора н средним полюсом равно шириие крайних полюсов.
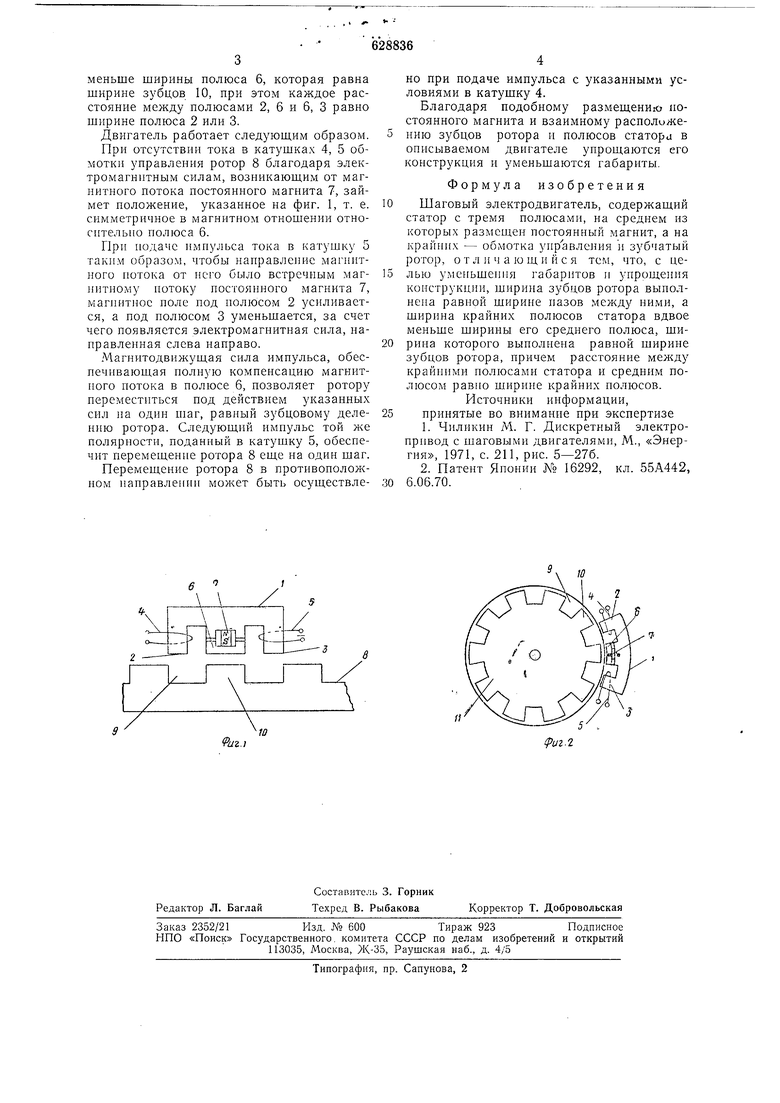
На фиг. 1 и 2 схематично изображены поиеречные разрезы описываемого двигателя, соответственно с линейным и вращательным перемещением ротора.
Описываемый двигатель состоит из статора 1, на крайних нолюсах 2 и 3 которого размещены катушкн 4 и 5 обмотки управления, а на среднем полюсе 6 установлен постоянный магнит 7. Ротор двигателя представляет собой рейку 8, на которой имеются пазы 9 и зубцы 10. Возможно также выполнение ротора в виде цилиндра 11 (фиг. 2), на котором тоже имеются пазы 9 и зубцы 10. Статор в этом случае выполнен в виде части кольца с таким же взаимным расположением на нем нолюсов 2, 3 и 6, катушек 4 и 5 и постоянного магнита 7, как и на фиг. 1.
В обоих случаях ширина зубцов 10 ротора выполнена равной ширине пазов 9, а ширина полюсов статора 2 и 3 в два раза
меньше ширины полюса 6, которая равна ширине зубцов 10, при этом каждое расстояние между полюсами 2, 6 и 6, 3 равно ширине полюса 2 или 3.
Двигатель работает следуюш,им образом.
При отсутствии тока в катушках 4, 5 обмотки управления ротор 8 благодаря электромагнитным силам, возникаюшим от магнитного потока постоянного магнита 7, займет положение, указанное на фиг. 1, т. е. симметричное в магнитном отношении относительно нолюса 6.
При иодачс имиульса тока в катушку 5 таким образом, чтобы направление магнитного нотока от него было встречным магнитному потоку постоянного магнита 7, магнитное поле под нолюсом 2 усиливается, а под нолюсом 3 уменьшается, за счет чего появляется электромагнитная сила, нанравленная слева направо.
Магнитодвижуш,ая сила импульса, обеспечиваюшая полную компенсацию магнитного потока в полюсе 6, позволяет ротору переместнться под действием указанных сил на один шаг, равный зубцовому делеПИЮ ротора. Следуюш,ий имнульс той полярности, поданный в катушку 5, обеспечит перемешение ротора 8 еш,е на один шаг.
Перемещение ротора 8 в противоположиом наиравлеиии может быть осуществлено при подаче импульса с указанными условиями в катушку 4.
Благодаря подобному размещению постоянного магнита и взаимному расположению зубцов ротора и полюсов статора в описываемом двигателе упрощаются его конструкция и уменьшаются габариты.
Формула изобретения
Шаговый электродвигатель, содержащий статор с тремя полюсами, на среднем из которых размешен постоянный магнит, а на крайних - обмотка унравления и зубчатый ротор, отличающийся тем, что, с целью уменьшения габаритов и упрощения конструкции, щирина зубцов ротора выполнена равной щирине пазов между ними, а ширина крайних полюсов статора вдвое меньше ширины его среднего нолюса, ширина которого выполнена равной ширине зубцов ротора, причем расстояние крайними полюсами статора и средним полюсом равно щирине крайннх полюсов. Источники информации,
принятые во внимание при экспертизе
1.Чиликин М. Г. Дискретный электропривод с шаговыми двигателями, М., «Энергия, 1971, с. 211, рис. 5-276.
2.Патент Янонии 9 16292, кл. 55А442, 6.06.70.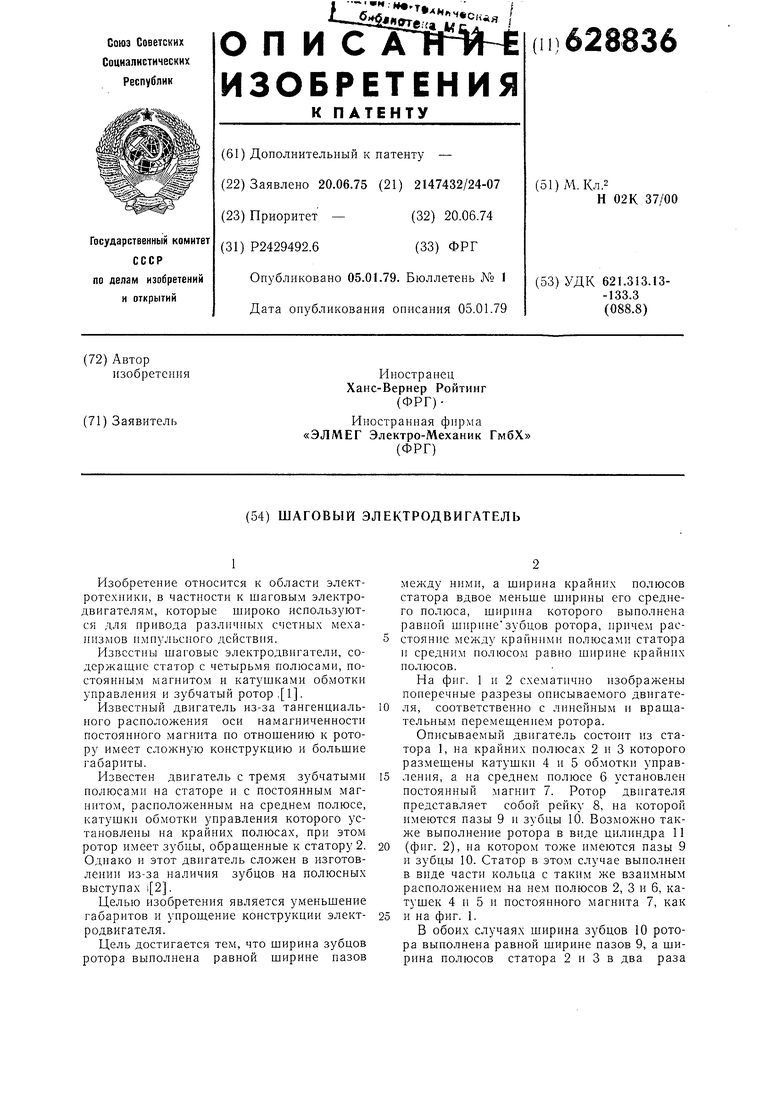
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1983 |
|
SU1140207A1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2074489C1 |
| Однофазный шаговый электродвига-ТЕль | 1979 |
|
SU811428A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1988 |
|
RU2030067C1 |
| Вентильный электродвигатель | 1986 |
|
SU1327242A1 |
| Шаговый электродвигатель | 1980 |
|
SU934567A1 |
| Шаговый электродвигатель | 1983 |
|
SU1310963A1 |
Риг.}
(риг.г
