Изобретение относится к электротехнике, а именно к бесконтактным моментным электродвигателям с постоянными магнитами, и может быть использовано в высокоточных аналоговых и цифровых исполнительных и управляемых электроприводах, в безредукторных следящих системах автоматического управления объектами различного назначения, а также в разработках многофазных синхронных электродвигателей с неограниченным углом поворота вала управляемого объекта [Столов Л.И., Зыков Б.Н. Моментные двигатели с постоянными магнитами. - М.: Энергия, 1977. - 112 с.].
Предлагаемый бесконтактный моментный электродвигатель с постоянными магнитами по принципиальному построению является синхронным индукторным реактивным электродвигателем с осевым (аксиальным) возбуждением от постоянных магнитов и униполярным магнитным полем в воздушном зазоре (далее - БМЭД) [Каасик П.Ю., Блинов И.В. Асинхронные индукторные микродвигателя устройств автоматики. - Л.: Энергоиздат. Ленингр. отделение, 1982. - 152 с. (стр.16-18); Юферов Ф.М. Электрические машины автоматических устройств. Учебник для вузов. - М.: "Высшая школа", 1976. - 416 с. (стр.159-161); Куракин А.С. Редукторные электродвигатели на зубцовых гармониках поля. Автореферат диссертации на соискание ученой степени доктора технических наук. - М.: МЭИ, 1971. - 54 с. (стр.3-4, 18); Микроэлектродвигатели для систем автоматики: технический справочник. / Под редакцией Лодочникова Э.А. и Юферова Ф.М. - М.: Энергия, 1969. - 272 с. (стр.179-184)] и реализует электромагнитную редукцию частоты вращения ротора по первой, зубцовой, гармонике магнитной проводимости воздушного зазора.
Известен однофазный индукторный шаговый электродвигатель с постоянными магнитами с поперечным возбуждением [А.с. 252451, СССР, кл. 21 d1, 19; МКИ3 Н 02 n. Однофазный шаговый двигатель./ Ивоботенко Б.А., Лодочников Э.А., Палий И.М. - Опубл. 28.09.1969., Бюл. N 29], содержащий магнитомягкий кольцевой пазовый статор с явно выраженными зубчатыми полюсами и с сосредоточенной однофазной обмоткой управления якоря, выполненной в виде катушки, и ротор, выполненный в виде кольцевого зубчатого магнитомягкого магнитопровода и намагниченных в одном направлении постоянных магнитов, а зубчатые полюса статора и зубчатый магнитопровод ротора обращены друг к другу и разделены воздушным зазором. Недостатками указанного аналога являются низкие моментные характеристики и энергетические показатели из-за значительных пульсаций создаваемого момента ввиду его реактивного характера и высокого уровня электромагнитных потерь, вызванных отсутствием униполярного магнитного поля в воздушном зазоре, а также узкая область его использования.
Известен аналогичный по принципиальному построению синхронный индукторный электродвигатель с постоянными магнитами с осевым возбуждением и униполярным магнитным полем в воздушном зазоре [А.с. 278852, СССР, кл. 21 d2, 16; МКИ3 H 02 k 19/02. Синхронный редукторный электродвигатель./ Куракин А.С. - Опубл. 21.08.1970., Бюл. N 26], содержащий магнитомягкий кольцевой пазовый статор с явно выраженными полюсами и с сосредоточенной m фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов и ротор, выполненный в виде кольцевого зубчатого магнитомягкого магнитопровода, а полюса статора и зубчатый магнитопровод ротора обращены друг к другу и разделены воздушным зазором. Недостатками указанного аналога являются низкие моментные характеристики и энергетические показатели ввиду наличия значительных пульсаций создаваемого момента из-за содержания четных и нечетных гармонических составляющих момента реактивного характера при высоком уровне электромагнитных потерь и потоков рассеяния постоянных магнитов и, как следствие, низкой эффективности использования активных материалов в силу наличия размагничивающей реакции якоря (обмоток управления) и наведенной в них генераторной ЭДС самоиндукции (ЭДС вращения ротора), высокого уровня остаточного момента и его пульсаций, а также узкая область его использования.
Известны аналогичные по назначению однофазные индукторные синхронные электродвигатели с постоянными магнитами с осевым возбуждением и униполярным магнитным полем в воздушном зазоре [А.с. 258435, СССР, кл. 21 d1, МКИ3 H 02 k. Однофазный нереверсивный шаговый двигатель./ Ивоботенко Б.А., Луценко В.Е., Мещеряков В.Ф. - Опубл. 03.12.1969, Бюл. N 1 за 1970 г.; А.с. 413583, СССР, МКИ3 H 02 k 37/00. Однофазный шаговый двигатель./ Ивоботенко Б.А., Гаврилова Л.А. - Опубл. 30.01.1974, Бюл. N 4; А.с. 626471, СССР, МКИ3 H 02 K 19/06, H 02 K 21/30. Синхронный однофазный электродвигатель./ Ивоботенко Б.А., Кулевская Е.Ф., Табатадзе Г.Г. и др. - Опубл. 30.09.1978, Бюл. N 36], содержащие магнитомягкий кольцевой пазовый статор с явно выраженными зубцами и с сосредоточенной однофазной обмоткой управления якоря, выполненной в виде катушек, кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов и ротор, выполненный в виде кольцевого зубчатого магнитомягкого магнитопровода, при этом зубчатые поверхности статора и зубчатые поверхности магнитопровода ротора обращены друг к другу и разделены воздушным зазором. Недостатками указанных аналогов являются низкие моментные характеристики и энергетические показатели в силу наличия размагничивающей реакции якоря (обмоток управления), значительных пульсаций создаваемого момента из-за четных и нечетных гармонических составляющих момента реактивного характера, высокого уровня электромагнитных потерь и потоков рассеяния постоянных магнитов, высокого остаточного момента и его пульсаций, а также значительная осевая длина электродвигателя, технологически сложные для изготовления конструкции, узкая область их использования.
Для повышения моментных характеристик и энергетических показателей в конструкциях указанных аналогов индукторные синхронные электродвигатели с постоянными магнитами с аксиальным возбуждением и униполярным магнитным полем в воздушном зазоре выполняют многостаторными, т.е. с увеличением числа соосно располагаемых одинаковых магнитомягких кольцевых пазовых статоров с явно выраженными зубцами и с сосредоточенными однофазными обмотками управления якоря и соответствующим увеличением либо числа, либо длины кольцевых зубчатых магнитомягких магнитопроводов ротора и числа кольцевых слоев аксиально намагниченных в одном направлении постоянных магнитов. Этим достигается, с одной стороны, получение многофазных конструкций электродвигателей с некоторым увеличением пускового и вращающего моментов, а с другой стороны, некоторое снижение реактивных моментов. К ним относятся известные аналогичные по назначению индукторные электродвигатели с постоянными магнитами [А.с. 417085, СССР, МКИ3 Н 02 К 37/00. Многопакетный шаговый двигатель./ Ратмиров В.А. и Ивоботенко Б.А. - Опубл. 05.08.1976, Бюл. N 29; А.с. 1363389 СССР, МКИ3 Н 02 К 29/00. Вентильный электродвигатель./ Русаков В.В., Демагин А.В. и Исаков В.Г. - Опубл. 30.12.1987, Бюл. N 48; А.с. 1823127, СССР, МКИ3 Н 02 Р 8/00, Н 02 К 37/00. Индукторный n-фазный шаговый электродвигатель./ Ивоботенко Б.А., Доброслов В.Г. и Московская Е.С. - Опубл. 23.06.1993, Бюл. N 23; Ратмиров В.А. и Ивоботенко Б.А. Шаговые двигатели для систем автоматического управления. Библиотека по автоматике, вып.66. - М. -Л.: Госэнергоиздат, 1962. - 128 с. (стр.36, 89-92)], содержащие магнитомягкие кольцевые пазовые статоры с явно выраженными полюсами или зубцами и с сосредоточенными m-фазными обмотками управления якоря, выполненными в виде катушек, кольцевые слои аксиально намагниченных в одном направлении постоянных магнитов и ротор, выполненный в виде кольцевых зубчатых магнитомягких магнитопроводов, при этом полюса или зубчатые поверхности статора и зубчатые поверхности магнитопроводов ротора обращены друг к другу и разделены воздушным зазором.
Недостатками аналогов с многостаторными конструкциями являются также невысокие моментные характеристики и энергетические показатели по вышеуказанным причинам охарактеризованных выше аналогов, которые в полной мере не преодолены, а наряду с усложнением конструкций и технологии их изготовления, с увеличением габаритных размеров и неизбежных погрешностей при сборке, возникающей при этом нестабильностью конструкций с большим количеством составных частей в расширенных условиях эксплуатации, указанные причины являются доминирующими.
Из известных конструкций бесконтактных моментных электродвигателей с постоянными магнитами с осевым возбуждением от аксиально намагниченных постоянных магнитов и униполярным магнитным полем в воздушном зазоре наиболее близким по технической сущности и конструкции к предлагаемому изобретению является бесконтактный моментный электродвигатель, выбранный за прототип [Демагин А.В. Электрические машины для непосредственного привода приборных систем. Обзоры по судостроительной технике. Институт "РУМБ". - Л.: ЦНИИ "Румб", Научно-производственное объединение "Азимут", 1991. - 80 с. (стр.32-35)], содержащий магнитомягкий кольцевой пазовый статор с явно выраженными зубчатыми полюсами и с сосредоточенной m-фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, и ротор, выполненный в виде двух соосно расположенных кольцевых зубчатых магнитомягких магнитопроводов, развернутых друг относительно друга на половину своего зубцового деления, между которыми размещен кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов, причем зубчатые полюса статора и зубчатые магнитопроводы ротора обращены друг к другу и разделены воздушным зазором, а зубцы на магнитопроводах ротора и на полюсах статора выполнены с равномерными и равными друг другу зубцовыми делениями. Недостатками прототипа являются невысокие моментные характеристики и энергетические показатели, невысокий уровень использования активных материалов и массо-габаритных показателей, ограниченные возможности использования в управляемых электроприводах и в безредукторных следящих системах автоматического управления.
Моментные характеристики прототипа и предлагаемого БМЭД определяются значениями "полезных" статического синхронизирующего, пускового и вращающего моментов (далее - полезные моменты), а также "тормозных" моментов (далее тормозные моменты): статических, таких как остаточные моменты сопротивления при обесточенной и при запитанной обмотке с их пульсациями; и динамических, вызываемых ЭДС вращения ротора (генераторной ЭДС самоиндукции), реакцией и индуктивностью обмоток якоря, высшими гармониками в магнитной проводимости воздушного зазора и их взаимодействием с током в обмотке якоря, ростом магнитного сопротивления и потерями в магнитной цепи электродвигателя в функции частоты вращения его ротора. Энергетические показатели определяются значениями потребляемого тока и величины прикладываемого к обмотке якоря напряжения питания, в т.ч. их составляющими для преодоления тормозных моментов [Ратмиров В.А. и Ивоботенко Б.А. Шаговые двигатели для систем автоматического управления. Библиотека по автоматике, вып.66. - М.-Л.: Госэнергоиздат, 1962. - 128 с. (стр.16-18); Каасик П.Ю., Блинов И.В. Асинхронные индукторные микродвигателя устройств автоматики. - Л.: Энергоиздат. Ленингр. отделение, 1982. - 152 с. (стр.108-109); Кенио Т., Нагамори С.Двигатели постоянного тока с постоянными магнитами. - М.: Энергоатомиздат, 1989. - 184 с. (стр.11-12); Микроэлектродвигатели для систем автоматики: технический справочник. / Под редакцией Лодочникова Э.А. и Юферова Ф.М. - М.: Энергия, 1969. - 272 с. (стр.213-221).
Чем выше полезные моменты и ниже тормозные моменты, тем выше моментные характеристики БМЭД. Чем ниже значения потребляемого тока и величины прикладываемого к обмотке якоря напряжения питания при тех же моментных характеристиках, тем выше энергетические показатели БМЭД.
Расчетный синхронизирующий момент прототипа и предлагаемого БМЭД прямо пропорционален произведению числа витков обмотки якоря, потребляемого обмоткой тока, магнитного потока постоянных магнитов ротора, который сцепляется с катушками обмотки якоря, числа зубцов ротора и отношения первой гармоники к постоянной составляющей магнитной проводимости воздушного зазора между кольцевыми зубчатыми магнитомягкими магнитопроводами ротора и магнитомягким кольцевым пазовым статором [Демагин А.В. Электрические машины для непосредственного привода приборных систем. Обзоры по судостроительной технике. Институт "РУМБ". - Л.: ЦНИИ "Румб", Научно-производственное объединение "Азимут", 1991. - 80 с. (стр.34)]. Измеряемый синхронизирующий момент моментного электродвигателя относительно расчетного включает в себя момент трения в подшипниковых узлах управляемого объекта, на валу которого установлен ротор двигателя, остаточный момент сопротивления при обесточенной обмотке (момент "запинания") с его пульсациями и остаточный момент при запитанной обмотке якоря с его пульсациями, возникающий от наличия односторонних радиальных сил тяжения между кольцевыми зубчатыми магнитомягкими магнитопроводами ротора и статора [Куракин А.С. Редукторные электродвигатели на зубцовых гармониках поля. Автореферат диссертации на соискание ученой степени доктора технических наук. - М.: МЭИ, 1971. - 54 с. (стр.30-31); Микроэлектродвигатели для систем автоматики: технический справочник. /Под редакцией Лодочникова Э.А., Юферова Ф.М. - М.: Энергия, 1969 - 272 с. (стр.172-180); Патент RU 2195066 С2, МПК7 Н 02 К 29/06, 29/08. Вентильный электродвигатель./ Ступицкий В.П., Молочков М.Ю. - Опубл. 10.09.2002 г. (стр.4)].
Пусковой момент моментного электродвигателя относительно измеряемого синхронизирующего момента меньше: на величину момента трения в подшипниковых узлах управляемого объекта, на валу которого установлен ротор двигателя; на величину, определяемую числом фаз обмотки якоря и стремится в пределе к последнему с ростом числа фаз, при этом разность синхронизирующего и пускового моментов является составляющей пульсации момента; на величину максимального значения остаточного момента сопротивления при обесточенной обмотке (момент "залипания"), определяемого суммарной величиной минимального значения (постоянной составляющей) остаточного момента и максимального значения его пульсаций от второй и высших зубцовых гармоник магнитной проводимости воздушного зазора; на величину максимального значения остаточного момента при запитанной обмотке якоря с его пульсациями, возникающего от наличия односторонних радиальных сил тяжения между кольцевыми зубчатыми магнитомягкими магнитопроводами ротора и статора [Ратмиров В.А. и Ивоботенко Б.А. Шаговые двигатели для систем автоматического управления. Библиотека по автоматике, вып.66. - М.-Л.: Госэнергоиздат, 1962. - 128 с. (стр.18-19); Вольдек А.И. Электрические машины. - Л.: Энергия, 1974. - 840 с. (стр.390-394); Куракин А.С. Редукторные электродвигатели на зубцовых гармониках поля. Автореферат диссертации на соискание ученой степени доктора технических наук. - М.: МЭИ, 1971. - 54 с. (стр.30-31); А.с. 626471 СССР, МКИ3 Н 02 К 19/06, Н 02 К 21/30. Синхронный однофазный электродвигатель./ Ивоботенко Б.А., Кулевская Е.Ф., Табатадзе Г.Г. и др. - Опубл. 30.09.1978., Бюл. N 36].
Вращающий момент БМЭД определяется системой уравнений Парка-Горева и является разностью пускового момента и тормозных динамических моментов, вызываемых ЭДС вращения ротора, реакцией и индуктивностью обмоток якоря, высшими гармониками в магнитной проводимости воздушного зазора и их взаимодействием с током в обмотке якоря, ростом магнитного сопротивления и потерями в магнитной цепи электродвигателя в функции частоты вращения его ротора [Буд Д.А. Бесконтактные электрические машины. - М.: Высшая школа, 1990. - 416 с. (стр.15, 24); Хрущев В.В. Электрические машины систем автоматики. - Л.: Энергоатомиздат. Ленингр. отделение, 1985. - 368 с. (стр.127-128); Микроэлектродвигатели для систем автоматики: технический справочник./ Под редакцией Лодочникова Э.А. и Юферова Ф.М. - М.: Энергия, 1969. - 272 с. (стр.172-180); Лодочников Э.А., Кафтанатий В.Т., Куракин А.С. Новые тихоходные синхронные микродвигатели с равномерной скоростью вращения // Электротехника. - 1967. - №11. - С.54-56 (стр.55)].
Известно, что [Ратмиров В.А. и Ивоботенко Б.А. Шаговые двигатели для систем автоматического управления. Библиотека по автоматике, вып.66. - М.-Л.: Госэнергоиздат, 1962. - 128 с. (стр.26)] в принципиально-конструктивном построении прототипа, равно как и в предлагаемом БМЭД, влияние размагничивающей реакции якоря на вращающий момент имеет уровень второго-третьего порядка малости по сравнению с влиянием ЭДС вращения ротора, которая модулируется магнитной проводимостью воздушного зазора с двухсторонней зубчатостью, а следовательно, снижение этого влияния приводит к росту полезных моментов и снижению их пульсаций. Пульсации полезных моментов в бесконтактном моментном электродвигателе с постоянными магнитами приводят к снижению средних значений полезных моментов по сравнению с максимальными и к неравномерности (не плавности) вращения ротора. Это существенно снижает точностные и надежностные характеристики управляемых электроприводов и безредукторных следящих систем автоматического управления и соответственно сужает возможности использования бесконтактных моментных электродвигателей с постоянными магнитами. Пульсации полезных моментов обусловлены также пульсациями остаточного момента сопротивления и наличием односторонних радиальных сил тяжения при обесточенной и при запитанной обмотке якоря, пульсациями от высших гармоник магнитной проводимости воздушного зазора и пульсациями от несинусоидальности тока в обмотке якоря, а также их взаимодействиями [Микроэлектродвигатели для систем автоматики: технический справочник. /Под редакцией Лодочникова Э.А. и Юферова Ф.М. - М.: Энергия, 1969. - 272 с.(стр.172-180, 222-229); Куракин А.С., Лодочников Э.А., Юферов Ф.М. Синхронный редукторный двигатель с осевым возбуждением // Электротехника. - 1967. - №6. - С.23-27 (стр.23-25); Каасик П.Ю., Блинов И.В. Асинхронные индукторные микродвигателя устройств автоматики. - Л.: Энергоиздат. Ленингр. отделение, 1982. - 152 с. (стр.108-113); Алексеева М.М. Машинные генераторы повышенной частоты. - Л.: Энергия, 1967. - 344 с. (стр.36-45)].
Существенное уменьшение или исключение в заявляемом (предлагаемом) БМЭД вышеуказанных моментов и явлений, а также причин их вызывающих, за счет отдельных и совокупности признаков изобретения является конкретизацией достигаемых технических результатов, обеспечивающих решение поставленной задачи изобретения.
Задачей изобретения является создание бесконтактного моментного электродвигателя с повышенными моментными характеристиками и энергетическими показателями, упрощенной конструкции и технологии ее изготовления, с повышенным использованием активных материалов, с уменьшенными массогабаритными показателями и расширенными возможностями его использования.
Достигаемыми техническими результатами в предлагаемом БМЭД являются повышение моментных характеристик и энергетических показателей, упрощение конструкции и технологии ее изготовления, повышение использования активных материалов, уменьшение массогабаритных показателей и расширение возможностей использования предлагаемого БМЭД в аналоговых и цифровых управляемых электроприводах и в безредукторных следящих системах автоматического управления.
Для решения поставленной задачи и достижения указанных технических результатов в бесконтактном моментном электродвигателе, содержащем магнитомягкий кольцевой пазовый статор с Р явно выраженными зубчатыми полюсами и с сосредоточенной m-фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, и ротор, выполненный в виде двух соосно расположенных кольцевых зубчатых магнитомягких магнитопроводов ротора, развернутых относительно друг друга на половину своего зубцового деления, между которыми размещен кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов, причем зубчатые полюса статора и зубчатые магнитопроводы ротора обращены друг к другу и разделены воздушным зазором δ, а зубцы на магнитопроводах ротора и на полюсах статора выполнены с равномерными и равными друг другу зубцовыми делениями TZ, ротор снабжен немагнитной втулкой толщиной большей половины толщины bM слоя постоянных магнитов, на которой установлены и закреплены неподвижно относительно друг друга зубчатые магнитопроводы ротора равной друг другу активной осевой длиной LP и кольцевой слой постоянных магнитов, при этом число m фаз m-фазной обмотки якоря выполнено кратным трем, определяемым как m=2f±1, где f равно 1, 2, 3,..., а явно выраженные зубчатые полюса на пазовом статоре расположены равномерно, при этом их число определяется как Р=2m×2S, где s равно 0, 1, 2,..., а на каждом зубчатом полюсе статора симметрично относительно его оси размещено нечетное число зубцов ZC толщиной bZc, при этом оси зубцов соседних зубчатых полюсов статора смещены друг относительно друга на величину, пропорциональную отношению ±TZ к m, причем соседние полюса статора разделены шлицом шириной bШ не менее десятикратной величины воздушного зазора, определяемой из соотношения bШ=TZ×[(1±1/m)-bZC/TZ], а число зубцов ZR на каждом из зубчатых магнитопроводов ротора выполнено кратным 2n при n равном 2, 3, 4,..., определяемым как ZR=P×(Zc±1/m), причем знак "плюс" соответствует раздвижению соседних полюсов статора, а знак "минус" - сближению соседних полюсов статора, при этом толщина зубцов bZP каждого из зубчатых магнитопроводов ротора выполнена равной половине его зубцового деления TZ и связана с толщиной зубцов зубчатых полюсов статора bZc соотношением 2/3≤bZC/bZP≤1, а катушки обмотки якоря одной фазы, отстоящие друг от друга на число полюсных делений статора, равное числу m фаз, соединены последовательно-согласно, при этом активная осевая длина LC кольцевого пазового статора с зубчатыми полюсами определяется из соотношения LC=(2LP+bM), причем кольцевые зубчатые магнитопроводы ротора расположены относительно кольцевого пазового статора аксиально симметрично.
В вышеуказанном выполнении предлагаемого БМЭД обеспечивается существенное снижение до уровня единиц и долей процента пульсации (переменной составляющей) остаточного момента сопротивления при обесточенной обмотке якоря относительно пускового момента, минимизация среднего значения остаточного момента сопротивления при обесточенной обмотке якоря (момент "залипания"), а также исключение односторонних радиальных и осевых сил тяжения, вызванных магнитной несимметричностью конструкции и возникающей вследствие этого асимметрии магнитных сил между кольцевыми зубчатыми магнитопроводами ротора и зубчатыми полюсами статора, как за счет равномерного расположения и числа явно выраженных зубчатых полюсов на пазовом статоре кратных двум, так и за счет получения близкой к постоянному значению в функции угла поворота ротора относительно статора суммарной магнитной проводимости воздушного зазора при обесточенной обмотке якоря путем выполнения постоянства или близкой к нему суммарной площади перекрытий зубцами магнитопроводов ротора зубчатых полюсов статора, а также их взаимной осевой (аксиальной) симметрии, что обеспечивается выполнением зубчатых магнитопроводов ротора равной друг другу активной осевой длиной LP, числа m фаз m-фазной обмотки якоря, кратного трем, определяемого как m=2f±1, где f равно 1, 2, 3,..., равномерным расположением явно выраженных зубчатых полюсов на пазовом статоре с их числом, определяемым как Р=2m×2S, где s равно 0, 1, 2,..., и размещением на каждом зубчатом полюсе статора симметрично относительно его оси нечетного числа зубцов ZC толщиной bZC, и смещением осей зубцов соседних зубчатых полюсов статора друг относительно друга на величину, пропорциональную отношению ±TZ к m, причем соседние полюса статора разделены шлицом шириной bШ не менее десятикратной величины воздушного зазора, определяемой из соотношения bШ=TZ×[(1±1/m)-bZC/TZ], выполнением числа зубцов ZR на каждом из зубчатых магнитопроводов ротора кратным 2n при n равном 2, 3, 4,..., определяемым как ZR=P×(ZC±1/m), причем знак "плюс" - соответствует раздвижению соседних полюсов статора, а знак "минус" - сближению соседних полюсов статора, выполнением толщины зубцов bZP каждого из зубчатых магнитопроводов ротора равной половине его зубцового деления TZ и ее взаимосвязи с толщиной зубцов зубчатых полюсов статора bZC из соотношения 2/3≤bZC/bZP≤1 с учетом разворота кольцевых зубчатых магнитомягких магнитопроводов ротора относительно друг друга на половину своего зубцового деления TZ, выполнением активной осевой длина LC кольцевого пазового статора с зубчатыми полюсами из соотношения LC=(2LP+bM) и расположением кольцевых зубчатых магнитопроводов ротора относительно кольцевого пазового статора аксиально симметрично.
Также благодаря выполнению многофазной конструкции, выполнению форм и геометрических параметров и соотношений зубцовых зон статора и ротора в предлагаемом БМЭД, а именно с числом m фаз m-фазной обмотки якоря кратным трем, определяемым как m=2f±1, где f равно 1, 2, 3,..., с равномерно расположенными явно выраженными зубчатыми полюсами на пазовом статоре, при этом их число определяется как Р=2m×2S, где s равно 0, 1, 2,..., а на каждом зубчатом полюсе статора симметрично относительно его оси размещено нечетное число зубцов Zc толщиной bZc, при этом оси зубцов соседних зубчатых полюсов статора смещены друг относительно друга на величину, пропорциональную отношению ±TZ к m, с толщиной зубцов bZP каждого из зубчатых магнитопроводов ротора равной половине его зубцового деления TZ, которая связана с толщиной зубцов зубчатых полюсов статора bZc соотношением 2/3≤hZc/bZP≤1 и с шириной шлицов bШ, разделяющих соседние зубчатые полюса статора, не менее десятикратной величины воздушного зазора, определяемой из соотношения bШ=TZ×[(1±1/m)-bZc/TZ], причем знак "плюс" соответствует раздвижению соседних полюсов статора, а знак "минус" - сближению соседних полюсов статора, а катушки обмотки якоря одной фазы, отстоящие друг от друга на число полюсных делений статора, равное числу m фаз, соединены последовательно-согласно, достигается повышение пускового и вращающего моментов, как за счет увеличения числа фаз, так и за счет уменьшения пульсаций моментов от снижения высших гармоник магнитной проводимости воздушного зазора (их амплитуд и их суммы) и снижения их взаимодействия с не синусоидальным током в обмотке якоря, в частности третьей, пятой, седьмой и кратных им гармоник магнитной проводимости воздушного зазора, каждая из которых при выполнении толщины зубцов полюсов статора bZC согласно указанному соотношению при толщине зубцов каждого из зубчатых магнитопроводов ротора bZP, равной половине его зубцового деления TZ, может быть существенно снижена или исключена. Это в свою очередь повышает относительную амплитуду первой гармоники магнитной проводимости (к постоянной составляющей) и соответственно повышает полезные моменты БМЭД, а также обеспечивает изменение магнитной проводимости воздушного зазора по первой гармонике косинусоиды в функции угла поворота ротора (или близкой к ней), что в свою очередь при синусоидальном, первой гармонике, изменении тока в обмотке якоря в функции угла поворота ротора (или близкой к ней) создает круговое магнитное поле в воздушном зазоре, обеспечивая постоянство полезных моментов с минимизацией их пульсаций в конструкции предлагаемого БМЭД. При этом повышение плавности вращения ротора БМЭД за счет снижения пульсаций моментов и выполнение числа зубцов ZR на каждом из зубчатых магнитопроводов ротора кратным 2n при n равном 2, 3, 4,..., позволяет расширить возможности использования и области применения БМЭД в высокоточных аналоговых и цифровых управляемых электроприводах и безредукторных следящих системах автоматического управления, обеспечив соответствие электрических двоичных редукций (чисел пар полюсов) в предлагаемом БМЭД с прецизионными индукционными датчиками угла (многополюсными вращающимися трансформаторами) и с двоичными кодами сигналов управления. Снижение синхронных (реактивных) и асинхронных тормозных динамических моментов, вызванных пульсациями от высших гармоник магнитной проводимости воздушного зазора и несинусоидальности тока в обмотке якоря, в том числе и от их взаимодействия, снижает магнитную и электрическую загрузку БМЭД и соответственно снижает потребляемый ток, а также снижает потери вращающего момента от влияния ЭДС вращения ротора и вызванного им переменного магнитного поля с составляющими более высокого порядка (потери на перемагничивание, вихревые токи и поверхностный эффект). Это приводит к более эффективному использованию магнитопроводов ротора и статора.
Повышение моментных характеристик, энергетических показателей и использования активных материалов в предлагаемом БМЭД достигается также за счет выполнения ширины шлицов bШ, разделяющих соседние зубчатые полюса статора, не менее десятикратной величины воздушного зазора, определяемой из соотношения bШ=TZ×[(1±1/m)-bZc/TZ], причем знак "плюс" соответствует раздвижению соседних полюсов статора, а знак "минус" - сближению соседних полюсов статора, благодаря чему является несущественным или практически отсутствует понижающее влияние на величину полезных моментов в предлагаемом БМЭД рассеяния магнитного потока между соседними полюсами статора, образованного протекающим в катушках обмотки якоря электрическим током и не взаимодействующим с магнитным потоком в воздушном зазоре слоя постоянных магнитов, что также определяет отсутствие взаимной индуктивности обмоток якоря. Это в свою очередь обеспечивает более эффективное магнитное использование магнитомягких магнитопроводов ротора и статора или позволяет соразмерно уменьшить потребляемый m-фазной обмоткой якоря БМЭД электрический ток.
Повышение моментных характеристик, энергетических показателей и использования активных материалов, расширение возможностей использования предлагаемого БМЭД также обеспечивается за счет введения немагнитной втулки толщиной большей половины толщины bM слоя постоянных магнитов, на которой установлены и закреплены неподвижно относительно друг друга кольцевые зубчатые магнитопроводы ротора равной друг другу активной осевой длиной LP и кольцевой слой постоянных магнитов, что достигается за счет существенного снижения рассеяния магнитного потока слоя постоянных магнитов и соответствующего повышения доли магнитного потока от него, участвующего в создании всех составляющих полезного момента БМЭД. Выполнение втулки из немагнитного материала с магнитной проницаемостью, близкой к магнитной постоянной, например из титана, меди и др., а также их сплавов с содержанием кремния [Шматко О.А., Усов Ю.В. Электрические и магнитные свойства металлов и сплавов: Справочник. - Киев: Наукова Думка, 1987. - 583 с. (стр.65, 501-502)], позволяет устанавливать ротор БМЭД на вал управляемого объекта из магнитопроводящих конструкционных сталей, что расширяет возможности использования БМЭД в объектах различного назначения. Повышение степени участия в создании всех составляющих полезного момента БМЭД магнитного потока от постоянных магнитов позволяет соразмерно уменьшить потребляемый ток или объем материала магнитопроводов статора или ротора или самих постоянных магнитов.
Повышение моментных характеристик и энергетических показателей, повышение использования активных материалов, уменьшение массо-габаритных показателей предлагаемого БМЭД, при сохранении достигнутых технических результатов и преимуществ по п.1 формулы изобретения, также обеспечивается согласно п.2 формулы изобретения выполнением ротора в виде соосно расположенных и установленных на общую немагнитную втулку кольцевых зубчатых магнитомягких магнитопроводов ротора числом N большим двух, два из которых крайние, а N минус два - внутренние, и кольцевых слоев аксиально намагниченных постоянных магнитов числом N минус единица, при этом каждые соседние зубчатые магнитопроводы ротора развернуты относительно друг друга на половину своего зубцового деления TZ, а между ними поочередно размещены по одному из N минус единица слоев постоянных магнитов, каждый из которых выполнен с равной друг другу толщиной bM, а соседние слои постоянных магнитов, разделенные одним внутренним зубчатым магнитопроводом ротора, аксиально намагничены в противоположных направлениях, при этом активные осевые длины LP каждого из крайних зубчатых магнитопроводов ротора выполнены равными друг другу, а активная осевая длина каждого внутреннего зубчатого магнитопровода ротора выполнена равной удвоенной активной осевой длине крайнего зубчатого магнитопровода ротора, при этом активная осевая длина LC пазового статора с зубчатыми полюсами определяется из соотношения Lc=2LP+2LP×(N-2)+bM×(N-1), что достигается за счет формирования элементарных модулей с максимальной и равномерной плотностью магнитного поля в виде пары кольцевых зубчатых магнитомягких магнитопроводов ротора, между которыми размещены по одному кольцевому слою постоянных магнитов, при этом по мере увеличения числа таких модулей, равного N минус единица, полезный момент увеличивается в большей степени, чем прямо пропорционально, за счет снижения рассеяния как магнитных потоков, образованных протекающим электрическим током в катушках сосредоточенной m-фазной обмотки якоря, так и магнитных потоков от постоянных магнитов и соответственно более эффективного магнитного использования магнитомягких магнитопроводов ротора и статора. При этом осевая длина БМЭД не равна простой сумме активных осевых длин элементарных модулей (как это предложено Babb M. AC Servomotor Features Unique Position Sensor./Control Engineering. - March. -1988. - pp.46-48, а также в многостаторных, указанных выше, индукторных синхронных электродвигателях), а меньше на величину активной осевой длины одного внутреннего зубчатого магнитопровода ротора, что обеспечивает уменьшение массогабаритных показателей БМЭД. Повышение долей магнитных потоков, образованных протекающим электрическим током в катушках сосредоточенной m-фазной обмотки якоря и от постоянных магнитов, участвующих в создании всех составляющих полезного момента БМЭД, позволяет соразмерно уменьшить потребляемый ток или объем материала магнитопроводов ротора и статора или самих постоянных магнитов. В указанном выполнении БМЭД также обеспечивается существенное снижение до уровня единиц и долей процента среднего остаточного момента сопротивления при обесточенной обмотке якоря (момент "залипания") и его пульсации (его переменной составляющей), а также исключение односторонних радиальных и осевых сил тяжения, вызванных несимметричностью магнитных сил между кольцевыми зубчатыми магнитопроводами ротора и зубчатыми полюсами статора, за счет получения близкой к постоянному значению в функции угла поворота ротора относительно статора суммарной магнитной проводимости воздушного зазора при обесточенной обмотке якоря путем выполнения постоянства или близкой к нему суммарной площади перекрытий зубцами магнитопроводов ротора зубчатых полюсов статора, а также их осевой (аксиальной) симметрии.
Расширение возможностей использования, повышение моментных характеристик и использования активных материалов в предлагаемом БМЭД при сохранении достигнутых технических результатов и преимуществ по п.1 и 2 формулы изобретения, также обеспечивается, согласно п.3 формулы изобретения, выполнением магнитомягкого кольцевого пазового статора и кольцевых зубчатых магнитомягких магнитопроводов ротора шихтованными из склеенных листов холоднокатаной изотропной или анизотропной электротехнической стали высокотемпературным, не менее 200°С, клеем, в частности фенолкаучуковым или элементоорганическим модифицированным каучуком, причем отношение толщины клеевого слоя bк к толщине листа bC удовлетворяет условию 0,04<bK/bC<0,09 при удельном давлении перпендикулярно плоскости листов в интервале 0,784÷1,177 МПа ([7,84÷11,77]×105 Н/м2), что достигается за счет обеспечения длительной работоспособности БМЭД при более высокой температуре эксплуатации, более 120-150°С, без снижения энергетических показателей и с повышением моментных характеристик и магнитного использования магнитомягких магнитопроводов ротора и пазового статора (повышение использования активных материалов), а также за счет высокой механической прочности шихтованных магнитомягкого кольцевого пазового статора и кольцевых зубчатых магнитомягких магнитопроводов ротора, что обеспечивается установленным отношением толщины клеевого слоя bК к толщине листа bC, при котором одновременно достигается снижение магнитного сопротивления поперечным магнитным потокам от постоянных магнитов и обмотки якоря и обеспечивается повышенное, 1-10 кОм, значение электрического сопротивления между листами холоднокатаной изотропной или анизотропной электротехнической стали (например, марки стали по ГОСТ 21427.2 или по ГОСТ 21427.1), что снижает потери от вихревых токов в магнитомягком пазовом статоре и в кольцевых зубчатых магнитомягких магнитопроводах ротора. Выполнение установленного отношения толщины клеевого слоя bК к толщине листа bC при применении высокотемпературного, не менее 200°С, клеем, в частности фенолкаучукового или элементоорганического модифицированного каучуком (например ВК-26, ВК-26 М или ВК-38 [А.П.Петрова. Клеящие материалы: Справочник. / Под редакцией Е.Н.Кобалева и С.В.Резниченко. - М.: КиР. - 2002. - 195 с. (стр.56-58)]), обеспечивается удельным осевым давлением, перпендикулярным плоскости листов шихтованных магнитомягких магнитопроводов ротора и пазового статора в интервале 0,784÷1,177 МПа ([7,84÷11,77]×105 Н/м2), которое не снижает магнитной индукции насыщения и не приводит к необходимости повышения напряженности магнитного поля и одновременно обеспечивает максимальное значение коэффициента заполнения сталью в магнитомягких магнитопроводах ротора и пазового статора предлагаемого БМЭД, которое составляет 91-96%. Это расширяет возможности его использования и применения в приборах, работающих в условиях повышенных температур и ударно-вибрационных нагрузок при эксплуатации. Аналогично при традиционном уровне повышенной температуры эксплуатации БМЭД (до 70°С согласно ГОСТ 15150) может быть существенно повышен уровень допускаемого собственного теплового перегрева БМЭД и, следовательно, может быть существенно увеличена электромагнитная загрузка БМЭД за счет повышения потребляемого обмоткой статора электрического тока, что прямо пропорционально приводит к увеличению полезного момента и к повышению использования активных материалов магнитомягких магнитопроводов ротора и пазового статора.
Упрощение конструкции и технологии изготовления, повышение моментных характеристик и расширение возможностей использования предлагаемого БМЭД при сохранении достигнутых технических результатов и преимуществ по п.1, п.2 и п.3 формулы изобретения, также обеспечивается согласно п.4 формуле изобретения выполнением кольцевых зубчатых магнитопроводов ротора отдельно или одновременно с кольцевым пазовым статором из магнитомягкого сплошного материала с удельным электрическим сопротивлениям не менее 0,45·10-6 Ом·м и индукцией не менее 1,5 Тл, в частности из электротехнической кремниевой стали или железоникелькобальтового сплава. Упрощение конструкции и технологии изготовления достигается за счет выполнения как кольцевых зубчатых магнитомягких магнитопроводов ротора отдельно, т.е. кольцевой пазовый статор выполнен шихтованным из склеенных листов холоднокатаной изотропной или анизотропной электротехнической стали, так и одновременно (вместе) с магнитомягким кольцевым пазовым статором - сплошными, так как по сравнению с шихтованными каждый из магнитопроводов ротора и кольцевой пазовый статор являются одной деталью и изготавливаются с использованием только универсального токарного и электроискрового вырезного оборудования, а традиционный корпус для установки пазового статора не требуется. Повышение моментных характеристик предлагаемого БМЭД достигается за счет снижения пульсаций полезных и тормозных моментов, вызываемых синхронными реактивными моментами от высших четных гармоник в магнитной проводимости воздушного зазора и асинхронными моментами, за счет их фазового сдвига и демпфирования магнитопроводами ротора из сплошного магнитомягкого материала с высоким значением удельного электрического сопротивления, не менее 0,45·10-6 Ом·м, и индукцией технического насыщения не менее 1,5 Тл, без введения дополнительных демпферных магнитомягких (ферромагнитных) колец или короткозамкнутой обмотки на роторе [А.с. 626471, СССР, МКИ3 Н 02 К 19/06, Н 02 К 21/30. Синхронный однофазный электродвигатель./ Ивоботенко Б.А., Кулевская Е.Ф., Табатадзе Г.Г. и др. - Опубл. 30.09.1978, Бюл. N 36; U.S. PATENT 4488069. INT.CI3 H02K 37/00, STEPPING MOTOR./John H. Field, II, Medfield, Mass. - Filed: Aug. 10, 1983. Date of Patent: Dec. 11, 1984; Микроэлектродвигатели для систем автоматики: Технический справочник./ Под редакцией Лодочникова Э.А. и Юферова Ф.М. - М.: Энергия, 1969. - 272 с. (стр.223, 226); Куракин А.С.Редукторные электродвигатели на зубцовых гармониках поля. Автореферат диссертации на соискание ученой степени доктора технических наук. - М.: МЭИ, 1971. - 54 с. (стр.37)]. При указанных условиях выполнения сплошных кольцевых зубчатых магнитопроводов ротора из магнитомягкой электротехнической кремниевой стали, или кремнистого железа, или железоникелькобальтового сплава [Шматко О.А., Усов Ю.В. Электрические и магнитные свойства металлов и сплавов: Справочник. - Киев: Наукова Думка, 1987. - 583 с. (стр.468-471)], например из электротехнической стали по ГОСТ21427.1 или по ГОСТ 11036 с увеличением процентного содержания кремния до уровня не менее 3,0% или железоникелькобальтового сплава типа 50Н или 36КНМ по ГОСТ 10160, энергетические показатели предлагаемого БМЭД не ухудшаются. Расширение возможностей использования предлагаемого БМЭД обусловлено высокой коррозионной стойкостью указанных сплавов, в частности сплавов типа 50Н или 36КНМ по ГОСТ 10160, ко всем видам агрессивных сред и поэтому предлагаемый БМЭД может быть использован в широком ряде погружных морских, нефтегазовых, химических и иных подобных механизмах с соответствующей герметизацией обмотки якоря вакуумным нанесением изолирующих материалов.
Повышение моментных характеристик и использования активных материалов, расширение возможностей использования и уменьшение массогабаритных показателей предлагаемого БМЭД при сохранении достигнутых технических результатов и преимуществ по п.1, п.2, п.3 и п.4 формулы изобретения, также обеспечивается, согласно п.5 формулы изобретения, выполнением кольцевого слоя постоянных магнитов из высококоэрцитивного сплава с остаточной индукцией не менее 0,8 Тл, в частности из редкоземельных материалов SmCo или NiFeBr, причем отношения толщины bM слоя постоянных магнитов к воздушному зазору δ и радиальной высоты bM слоя постоянных магнитов к активный осевой длине Lp каждого из крайних зубчатых магнитопроводов ротора, удовлетворяют взаимосвязанным соотношениям 10≤bM/δ≤30 и 0,75≤bM/Lp≤2,5, что достигается за счет максимальных магнитной загрузки и плотности магнитного потока в зубчатых магнитопроводах ротора и пазовом статоре и соответственно прямо пропорциональным повышением полезных моментов предлагаемого БМЭД. Кольцевой слой высококоэрцитивных постоянных магнитов в предлагаемом БМЭД выполняется из редкоземельных материалов на основе SmCo - КС25 или KC37A (Sm2Co17), или NiFeBr - Нм30Ди6Р или Нм31Ди1Т или Нм32Ди1Т [Буд Д.А. Бесконтактные электрические машины. - М.: Высшая школа, 1990. - 416 с. (стр.54-56); Степанов А.П., Чабан Г.И., Андреева Л.П., Степанов Н.Н. Магниты постоянные./ Каталог НПО "Магнетон". - Владимир: Влад. ЦНТИ, 1988. - 129 с. (стр.5, 17-20, 34, 40, 103); Постоянные магниты. Магнитные системы. /Каталог продукции АО "НПО МАГНЕТОН". - Владимир: АО "НПО МАГНЕТОН", 1994. - 29 с. (стр.15-18)]. При этом индукция в зубцах магнитопроводов ротора, которые являются также концентраторами магнитного потока, от постоянных магнитов достигает значений 1,0 Тл и более. Индукция в зубцах магнитопроводов ротора и пазового статора при поданном на обмотки якоря напряжении от источника питания достигает значений 2,0 Тл и более, что позволяет повысить использование активных материалов - магнитопроводов ротора и пазового статора, а при отсутствии необходимости в повышении полезного момента пропорционально либо уменьшить массогабаритные показатели БМЭД, в частности осевую длину или наружный диаметр, либо уменьшить потребляемый обмоткой якоря электрический ток. Расширение возможностей использования предлагаемого БМЭД обусловлено достижением более высокого полезного момента и снижением массогабаритных показателей, что позволяет для большего круга приборов автоматического управления различного назначения заменить скоростные электродвигатели с понижающим редуктором на предлагаемый БМЭД, тем самым обеспечить создание безредукторных следящих электроприводов, отличающихся более высокой точностью работы и значительно большим сроком эксплуатации (службы).
Таким образом, исходя из вышеизложенного новые признаки заявляемого изобретения позволяют повысить моментные характеристики и энергетические показатели, упростить конструкцию и технологию ее изготовления, повысить использование активных материалов, уменьшить массогабаритные показатели и расширить возможности использования бесконтактного моментного электродвигателя, а предлагаемое изобретение соответствует критерию "изобретательский уровень".
Сущность изобретения поясняется четырьмя чертежами и одной схемой:
- на фиг.1 показан упрощенный вид спереди трехфазного БМЭД, где 1 - магнитомягкий кольцевой пазовый статор; 2 - пазы статора; 3 - явно выраженные зубчатые полюса статора с номерами 1*...12* с симметрично, относительно их оси, размещенными, нечетным числом ZC, зубцами; 4 - сосредоточенная m-фазная обмотка якоря (в частности, изображена трехфазная) с концами фаз А-А1, В-В1, С-С1; 5 - ротор с толщиной зубцов на каждом из кольцевых зубчатых магнитомягких магнитопроводов ротора bZP, ФI - магнитный поток, образованный электрическим током, протекающим в m фазной обмотке якоря 4 (показана в качестве примера радиальная проекция контура его замыкания).
- на фиг.2 показана схема сосредоточенной m-фазной обмотки якоря БМЭД (в частности изображена трехфазная обмотка якоря) с концами фаз А-А1, В-В1, С-С1 и номерами полюсов 1*...12*.
- на фиг.3 показан вертикальный разрез с наложенным сечением трехфазного БМЭД в продольном (осевом) направлении с числом N кольцевых зубчатых магнитомягких магнитопроводов ротора равным двум и числом кольцевых слоев постоянных магнитов равным единице, где 1 - магнитомягкий кольцевой пазовый статор с активной осевой длиной LC=(2LP+bM)±3δ, где Lp - активная осевая длина зубчатого (крайнего) магнитопровода ротора; bM - толщина слоя, аксиально намагниченных в одном направлении S→N, постоянных магнитов; δ - воздушный зазор между кольцевыми зубчатыми магнитомягкими магнитопроводами ротора и магнитомягким кольцевым пазовым статором; 4 - сосредоточенная m-фазная обмотка якоря (в частности, лобовые части ее катушек); 6 и 7 - кольцевые зубчатые магнитомягкие магнитопроводы ротора, развернутые относительно друг друга на половину своего зубцового деления TZ (TZ, деленное на два), с равной друг другу активной осевой длиной Lp, с равной друг другу толщиной зубцов bZp и с равномерными и равными друг другу зубцовыми делениями TZ; 8 - слой, аксиально намагниченных в одном направлении S→N, постоянных магнитов с толщиной bM и радиальной высотой hM; 9 - немагнитная втулка ротора толщиной bвm; большей половины толщины bM слоя постоянных магнитов; 10 - наружный бандаж слоя постоянных магнитов 8; ФM - магнитный поток, образованный слоем постоянных магнитов 8 (показана в качестве примера осевая (аксиальная) проекция контура его замыкания).
- на фиг.4 показан выносной элемент (вид Д) явно выраженного зубчатого полюса статора с соответствующей частью ротора БМЭД, где 2 - паз статора с шириной шлица между зубчатыми полюсами статора bШ не менее десятикратной величины воздушного зазора; 3 - явно выраженные зубчатые полюса статора с зубцовыми делениями TZ, с равными друг другу толщиной зубцов bZc и их нечетным числом Zc, которые симметрично размещены относительно оси каждого полюса, оси которых на соседних зубчатых полюсах смещены друг относительно друга на величину, тождественно (≡) пропорциональную отношению ±TZ к m; 6 - кольцевой зубчатый (крайний) магнитомягкий магнитопровод ротора; 8 - слой, аксиально намагниченных в одном направлении, постоянных магнитов, в частности выполненный из прямоугольных пластин; 9 - немагнитная втулка ротора; 10 - шпонка ротора.
- на фиг.5 показан вертикальный разрез с наложенным изображением продольной (осевой) поверхности ротора m-фазного БМЭД в продольном (осевом) сечении с числом N кольцевых зубчатых магнитомягких магнитопроводов ротора, равным пяти и числом N-1 кольцевых слоев постоянных магнитов, равных четырем, где 1 - магнитомягкий кольцевой пазовый статор с активной осевой длиной
Lc=[2Lp+2Lp×(N-2)+bм×(N-1)]±3δ, где Lp - активная осевая длина зубчатого (крайнего) магнитопровода ротора; bM - толщина слоя, аксиально намагниченных в одном направлении, постоянных магнитов; δ - воздушный зазор между кольцевыми зубчатыми магнитомягкими магнитопроводами ротора и магнитомягким кольцевым пазовым статором; 4 - сосредоточенная m-фазная обмотка якоря (в частности, лобовые части ее катушек); 6 и 7 - кольцевые зубчатые (крайние) магнитомягкие магнитопроводы ротора, развернутые друг относительно друга на половину своего зубцового деления TZ (TZ, деленное на два), с равной друг другу активной осевой длиной Lp, с равной друг другу толщиной зубцов bZP и с равномерными и равными друг другу зубцовыми делениями TZ; 8 - слои аксиально намагниченных в одном направлении S→N-N←S-S→N-N←S постоянных магнитов с толщиной bM и радиальной высотой hM; 9 - немагнитная втулка ротора толщиной bвm, большей половины толщины bM слоя постоянных магнитов; 10 - наружный бандаж слоев постоянных магнитов 8; 11 - шпонки ротора; 12 - кольцевые зубчатые (внутренние) магнитомягкие магнитопроводы ротора, развернутые друг относительно друга на половину своего зубцового деления TZ (TZ, деленное на два), с равной друг другу активной осевой длиной 2LP, с равной друг другу толщиной зубцов bZP и с равномерными и равными друг другу зубцовыми делениями TZ; ФM - магнитный поток, образованный слоями постоянных магнитов 8 (показаны в качестве примера осевые (аксиальные) проекции контуров их замыкания).
Конструкция предлагаемого БМЭД состоит из следующих составных частей и элементов.
Магнитомягкого кольцевого пазового статора 1 активной осевой длины LC с пазами 2 и с явно выраженными зубчатыми, с равномерными и равными друг другу, согласно фиг.4, зубцовыми делениями TZ, с равномерно расположенными полюсами 3 числом Р кратных двум, в частности, согласно фиг.1, равным 12 - №1*÷12* (Р=2m×2S=12, при m, равным трем и s, равным единице), выполненным либо шихтованным, в частности из склеенных низкотемпературным фенолоформальдегидным клеем БФР-4К или высокотемпературным фенолкаучуковым клеем ВК-26 М листов холоднокатаной изотропной марки 2011 или анизотропной марки 3411 электротехнической стали, либо сплошным, в частности из кремнистого железа марки 2421 или железоникелькобальтового сплава марок 36КНМ или 50Н. В пазах 2 статора 1 размещена сосредоточенная m-фазная, в частности трехфазная, при f равном единице, обмотка якоря 4 с концами фаз, согласно фиг.1 и 2: А-А1, В-В1, С-С1; катушки которой охватывают соответственно полюса статора: №1, 4, 7, 10 (первая фаза); №3, 6, 9, 12 (вторая фаза); №2, 5, 8, 11 (третья фаза). Катушки обмотки якоря 4 одной фазы, отстоящие друг от друга на m-полюсных делений статора 1, в частности, согласно фиг.1 и фиг.2, на три полюсных деления статора 1 (полюсное деление равно отношению 360°к Р) соединены последовательно-согласно. На зубчатых полюсах 3 статора 1, согласно фиг.1 и фиг.4, симметрично относительно оси каждого полюса расположено нечетное число зубцов ZC, в частности равное пяти, толщиной bZC, оси которых на соседних зубчатых полюсах 3 статора 1 смещены относительно друг друга на величину, пропорциональную отношению ±TZ к m, соседние зубчатые полюса 3 статора 1 разделены шлицами шириной bШ не менее десятикратной величины воздушного зазора, определяемой из соотношения bШ=TZ×[(1±1/m)-bZC/TZ], причем знак "плюс" соответствует раздвижению соседних полюсов статора, а знак "минус" - сближению соседних полюсов статора.
Ротора 5 с двумя, (крайними) для варианта конструкции БМЭД согласно фиг.3, кольцевыми зубчатыми, с равномерными и равными друг другу зубцовыми делениями TZ, магнитомягкими магнитопроводами 6 и 7 равной друг другу активной осевой длиной Lp, выполненными либо шихтованными, в частности из склеенных, низкотемпературным фенолоформальдегидным клеем БФР-4К или высокотемпературным фенолкаучуковым клеем ВК-26 М (рабочие температуры до 350°С), листов холоднокатаной изотропной марки 2011 или анизотропной марки 3411 электротехнической стали либо сплошными, в частности из кремнистого железа типа 2421 (массовая доля кремния [2,8÷3,8]%, удельное электрическое сопротивление не менее [0,47÷0,5]×10-6 Ом·м и магнитной индукцией не менее 1,6 Тл при напряженности магнитного поля 10×103 А/м) или железоникелькобальтового сплава марки 36КНМ (удельное электрическое сопротивление не менее 0,48×10-6 Ом·м и магнитной индукцией 1,55 Тл при напряженности магнитного поля 10×103 А/и). Между магнитопроводами 6 и 7 размещен кольцевой слой аксиально намагниченных в одном направлении S→N постоянных магнитов 8 (или кольцевой монолитный, намагниченный в аксиальном направлении S→N, постоянный магнит) толщиной bM и высотой hM, выполненный в частности из прямоугольных пластин высококоэрцитивных постоянных магнитов из редкоземельного материала SmCo - КС37А (остаточная индукция 0,82-0,9 Тл при коэрцитивной силе по индукции [560÷640]×103 А/м) или NiFeBr -Нм32Ди1Т (остаточная индукция 1,05-1,1 Тл при коэрцитивной силе по индукции не менее [750÷850]×103 А/м). На каждом кольцевом зубчатом магнитопроводе ротора 6 и 7 расположено двоичное (2n) число зубцов Zr, в частности, согласно фиг.1, равное 64 (при n равно 6) толщиной bZp.Слой постоянных магнитов 8 и магнитопроводы 6 и 7 установлены на общей немагнитной втулке 9 ротора 5 на эпоксидный клей, в частности К-400 или ВТ-25-200, а для высокомоментных и крупногабаритных БМЭД дополнительно на шпонки 11 с наружным бандажом 10 слоев постоянных магнитов 8 из лавсановой или углепластиковой нити. Немагнитная втулка 9 ротора 5 толщиной bвm, большей половины толщины слоя постоянных магнитов bM, выполнена из немагнитного материала, в частности из титана ВТ 1-0 (с относительной магнитной проницаемостью, близкой к магнитной постоянной) или хромистой стали 12Х18Н9Т-12Т (с магнитной проницаемостью, близкой к единице). Зубчатые магнитопроводы 6 и 7 ротора 5 развернуты друг относительно друга на половину зубцового деления TZ (TZ/2), как это показано на фиг.3 и 5. Зубчатые полюса 3 статора 1 и зубчатые магнитопроводы 6 и 7 ротора 5 обращены друг к другу и разделены воздушным зазором δ, а их зубцовые деления TZ равны друг другу, как это показано на фиг.3 и 5. Зубчатые магнитопроводы 6 и 7 ротора 5 с кольцевым слоем постоянных магнитов 8 расположены относительно пазового статора 1, активная осевая длина которого равна Lc=(2LP+bM)±3δ аксиально симметрично, как это показано на фиг.3.
Ротор 5 для варианта конструкции БМЭД с числом кольцевых зубчатых магнитомягких магнитопроводов большим двух, в частности, согласно фиг.5, содержит пять (N равно 5) магнитопроводов, соосно расположенных и установленных на общей немагнитной втулке 9, из которых магнитопроводы 6 и 7 - крайние, а магнитопроводы 12 - внутренние. Между каждыми соседними зубчатыми магнитопроводами ротора 6, 7 и 12 поочередно размещены, согласно фиг.5, по одному из четырех (N минус 1) кольцевых слоев постоянных магнитов 8, каждый из которых выполнен с равной друг другу толщиной bM, а соседние слои постоянных магнитов 8, разделенные одним из внутренних магнитопроводов ротора 12, намагничены в противоположных направлениях, как показано на фиг.5: S→N-N←S-S→N-N←S. Активные осевые длины Lp каждого из крайних магнитопроводов ротора 6 и 7 выполнены равными друг другу, а активная осевая длина каждого внутреннего зубчатого магнитопровода ротора 12, число которых, в частности, согласно фиг.5, равно трем (N минус 2), выполнена равной удвоенной активной осевой длине (2Lp) крайнего магнитопровода ротора 6 или 7. Каждые соседние зубчатые магнитопроводы ротора 6, 7 и 12 развернуты друг относительно друга на половину зубцового деления TZ (TZ, деленное на два), как это показано на фиг.5. Для указанного варианта конструкции БМЭД зубчатые полюса 3 статора 1 и зубчатые магнитопроводы ротора 6, 7 и 12 обращены друг к другу и разделены воздушным зазором 5, как это показано на фиг.3 и 5, а их зубцовые деления TZ равны друг другу, как это показано на фиг.3, 4 и 5. Зубчатые магнитопроводы ротора 6, 7 и 12 с кольцевыми слоями постоянных магнитов 8 расположены относительно пазового статора 1, активная осевая длина которого равна LC=2Lp+2Lp×(N-2)+bM×(N-1)±3δ, аксиально симметрично, как это показано на фиг.5.
Работа предлагаемого БМЭД осуществляется следующим образом.
При подключении источника m фазного напряжения или тока, например частотно-управляемого или управляемого от внешнего датчика углового положения вала объекта управления, на котором установлен ротор БМЭД, к сосредоточенной m фазной обмотке якоря 4, включенной например по схеме "звезда", в ее катушках протекает постоянный (отсутствует частотное управление) электрический ток, образующий магнитные потоки ФI, которые радиально-аксиально замыкаются через зубчатые полюса 3 магнитомягкого кольцевого пазового статора 1, воздушный зазор δ и кольцевые зубчатые магнитомягкие магнитопроводы ротора 6, 7 и 12 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5), при этом в зубцах зубчатых полюсов 3 статора 1, охваченных катушками соответствующих фаз обмотки якоря 4, направления магнитных потоков соответствуют направлению протекающего электрического тока в катушках фазной обмотки якоря 4 этих фаз от источника m-фазного напряжения или тока. Эти магнитные потоки взаимодействуют в воздушном зазоре δ с магнитным потоком ФM от каждого кольцевого слоя постоянных магнитов 8, который аксиально-радиально замыкается через кольцевые зубчатые магнитомягкие магнитопроводы ротора 6, 7 и 12 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5), воздушный зазор δ и зубчатые полюса 3 магнитомягкого кольцевого пазового статора 1, в результате чего образуется синхронизирующий момент. При включении частотного управления от источника напряжения, например с медленно меняющимся m-фазным, в частности трехфазным, напряжением на уровне долей Герца, ротор 5 БМЭД с кольцевыми зубчатыми магнитомягкими магнитопроводами 6, 7 и 12 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5) и с кольцевыми слоями постоянных магнитов 8, соосно установленными на общей немагнитной втулке 9, под действием образованного момента, практически равного пусковому, поворачивается синхронно-пропорционально с указанным медленно меняющимся напряжением соответствующим повороту "звезды" токов в катушках соответствующих фаз обмотки якоря 4 статора 1. При изменении полярности приложенного к сосредоточенной m-фазной обмотке якоря 4 статора 1 соответствующего m-фазного напряжения или направления протекающего в ней электрического тока, ротор 5 БМЭД с кольцевыми зубчатыми магнитомягкими магнитопроводами 6, 7 и 12 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5) и с кольцевыми слоями постоянных магнитов 8, соосно установленными на общей немагнитной втулке 9, изменяет направление своего поворота. По мере увеличения частоты m-фазного, в частности трехфазного, напряжения на обмотке якоря 4 статора 1 от источника напряжения ротор 5 БМЭД с кольцевыми зубчатыми магнитомягкими магнитопроводами 6, 7 и 12 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5) и с кольцевыми слоями постоянных магнитов 8, соосно установленными на общей немагнитной втулке 9, под действием образованного вращающего момента начинает синхронно пропорционально вращаться с частотой, пропорциональной частоте источника напряжения, при этом развиваемый вращающий момент пропорционален величине электрического тока, протекающего в обмотке якоря 4 статора 1 (при неизменных значениях числа витков обмотки якоря 4 статора 1, магнитного потока кольцевых слоев постоянных магнитов 8 ротора 5, который сцепляется с катушками обмотки якоря 4 статора 1, числа зубцов ZR на кольцевых зубчатых магнитомягких магнитопроводах 6, 7 и 12 ротора 5 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5), отношения первой гармоники к постоянной составляющей магнитной проводимости воздушного зазора δ между кольцевыми зубчатыми магнитомягкими магнитопроводами 6, 7 и 12 ротора 5 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5) и магнитомягким кольцевым пазовым статором 1 и числа элементарных модулей ротора 5 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5). Пропорциональность синхронного поворота или вращения ротора 5 БМЭД определяется отношением частоты m-фазного, в частности трехфазного, напряжения на обмотке якоря 4 статора 1 от источника напряжения к числу пар полюсов (коэффициенту электромагнитной редукции частоты вращения ротора) БМЭД, равному числу зубцов ZR на кольцевых зубчатых магнитомягких магнитопроводах 6, 7 и 12 ротора 5 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5). Следовательно, управление БМЭД по величине развиваемого момента (синхронизирующего, пускового или вращающего) реализуется посредством изменения величины приложенного к сосредоточенной m-фазной обмотке якоря 4 статора 1 соответствующего m-фазного напряжения или протекающего в ней электрического тока, а управление БМЭД по величине частоты вращения ротора реализуется посредством изменения частоты приложенного к сосредоточенной m-фазной обмотке якоря 4 статора 1 соответствующего m-фазного напряжения или протекающего в ней электрического тока. Управление БМЭД по направлению вращения ротора 5 с кольцевыми зубчатыми магнитомягкими магнитопроводами 6, 7 и 12 (последнее для варианта предлагаемого БМЭД, изображенного на фиг.5) и с кольцевыми слоями постоянных магнитов 8, соосно установленными на общей немагнитной втулке 9, реализуется посредством изменения полярности приложенного к сосредоточенной m-фазной обмотке якоря 4 статора 1 соответствующего m-фазного напряжения или направления протекающего в ней электрического тока.
Предельные значения создаваемых в предлагаемом БМЭД полезных моментов определяются величиной приложенного к сосредоточенной m-фазной обмотке якоря соответствующего m-фазного напряжения или протекающего в ней электрического тока, полной электромагнитной загрузкой статора и ротора с учетом теплового ограничения электрического сопротивления (прочности) изоляции провода катушек обмотки якоря или магнитным насыщением магнитомягкого кольцевого пазового статора с зубчатыми полюсами и кольцевых зубчатых магнитомягких магнитопроводов ротора. То или иное указанное предельное значение создаваемого в предлагаемом БМЭД каждого из полезных моментов определяется принятыми условиями при проектировании его конструкции. Предельная величина развиваемой частоты вращения ротора, являющейся частотой холостого хода, определяется значением частоты и величины приложенного к сосредоточенной m-фазной обмотке якоря соответствующего m-фазного напряжения или протекающего в ней электрического тока и ограничена в основном ЭДС вращения ротора, наводимой в обмотке якоря магнитным потоком от аксиально намагниченных постоянных магнитов, индуктивностью обмоток якоря и магнитными потерями. Совокупность значений развиваемых полезных моментов в предлагаемом БМЭД и соответствующих им частот вращения ротора находится в пределах его естественной механической характеристики, а совокупность значений развиваемых синхронизирующего или пускового моментов - в пределах его естественной нагрузочной характеристики.
Предложенный БМЭД осуществлен и реализован в полном соответствии и объеме с изложенными в пунктах 1, 2, 3,4 и 5 формулы изобретения, в описании, в чертежах и схеме технических решений (отдельных и совокупности заявленных признаков изобретения) в виде типоряда опытных образцов одномодульных и многомодульных конструкций БМЭД 11 модификаций с наружными диаметрами статора от 50 мм до 500 мм общим количеством более 50 экземпляров. Результаты их всесторонних испытаний, а также их опытная эксплуатация в составе цифровых безредукторных следящих систем и управляемых электроприводов в различных приборах автоматического управления, выпускаемых предприятием, подтвердили, что в полной мере повышены моментные характеристики и энергетические показатели, достигнуто упрощение конструкции и технологии ее изготовления, повышено использование активных материалов, уменьшены массогабаритные показатели и реализовано расширенное использование предложенного БМЭД. Описание указанных основных результатов изложено в издании: Пешехонов В.Г., Гутнер И.Е., Зиненко В.М., Савик В.Ф., Янушкевич В.Е. Интегрированный перископный комплекс.//Сборник докладов XI Санкт-Петербургской международной конференции по интегрированным навигационным системам (ISBN 5-900780-52-Х), 24-26 мая 2004 г., Санкт-Петербург, Россия. - Санкт-Петербург: ГНЦ РФ ЦНИИ "ЭЛЕКТРОПРИБОР", 2004. - С.52-59 (стр.55-56). В настоящее время разработана техническая документация для серийного производства 8 модификаций БМЭД предложенной конструкции.
Минимизация среднего остаточного момента сопротивления при обесточенной обмотке якоря (момент "залипания"), как за счет постоянства или близкой к нему суммарной площади перекрытий зубцами магнитопроводов ротора зубчатых полюсов статора, так и за счет исключения односторонних радиальных и осевых сил тяжения вследствие осевой (аксиальной) симметрии, подтверждена экспериментально и характеризуется полученным равенством амплитуд пульсаций остаточного момента (его переменной составляющей) в пределах полного оборота ротора БМЭД по и против часовой стрелки.
Примеры выполнения вариантов предлагаемого БМЭД с m-фазной обмоткой якоря кратной трем, как m=2f±1, где f равно 1, 2, 3,..., с пазовым статором с числом явно выраженных равномерно расположенных зубчатых полюсов, определяемом как Р=2m×2S, где s равно 0, 1, 2,..., на каждом из которых симметрично относительно его оси размещено нечетное число зубцов Zc и с зубчатыми магнитопроводами ротора с числом зубцов ZR на каждом кратном 2n при n, равном 2, 3, 4,... и определяемом как Zr=P×(ZC±1/m), а также с шириной bШ шлицов, которые разделяют соседние полюса статора, из соотношения bШ=TZ×[(1±1/m)-bZC/TZ] с учетом выполнения толщины зубцов bZP каждого из зубчатых магнитопроводов ротора, равной половине его зубцового деления TZ и выполнения соотношения 2/3≤bZc/bZp≤1 показаны в таблице 1. При дополнительном одновременном умножении ZR и Р на число 2q, где q равно 1, 2, 3,..., число вариантов выполнения предлагаемого БМЭД увеличивается.
Расчетно, с экспериментальным подтверждением, установлено, что выполнение втулки немагнитной, с магнитной проницаемостью, близкой к магнитной постоянной, и толщиной большей половины толщины bM слоя постоянных магнитов, на которой установлены и закреплены неподвижно относительно друг друга зубчатые магнитопроводы ротора и кольцевой слой постоянных магнитов, обеспечивает существенное снижение рассеяния магнитного потока слоя постоянных магнитов и соответствующее повышение доли магнитного потока от него, участвующего в создании всех составляющих полезного момента предлагаемого БМЭД, как это следует из таблиц 2 и 3.
В таблице 2 приведены для различных значений отношения магнитных проницаемостей рассеяния μσ к μo относительные значения (осредненные) магнитных потоков рассеяния Фσ к ФδP и относительные значения (осредненные) магнитного потока в воздушном зазоре предлагаемого БМЭД ФδP к ФδP max от слоя постоянных магнитов, где μо - магнитная постоянная; ФδP - значение магнитного потока в воздушном зазоре от слоя постоянных магнитов; ФδP max - максимальное значение магнитного потока в воздушном зазоре от слоя постоянных магнитов при отсутствии Фσ.
В таблице 3 приведены для различных значений отношения bвm к bM (равных и больших 0,5) относительные значения (осредненные) магнитных потоков рассеяния Фσ к ФδP и относительные значения (осредненные) магнитного потока в воздушном зазоре предлагаемого БМЭД ФδP к ФδP max от слоя постоянных магнитов.
Из таблиц 2 и 3 следует, что при выполнении немагнитной втулки (с магнитной проницаемостью, близкой к μо) и ее толщины bвm большей половины толщины bM слоя постоянных магнитов существенно снижаются или практически исключаются потери магнитного потока слоя постоянных магнитов. Этим обеспечивается повышение моментных характеристик, энергетических показателей и использования активных материалов, расширение возможностей использования предлагаемого БМЭД. Известно, что отношение амплитуды первой гармоники магнитной проводимости λ1 воздушного зазора δ, образованного зубчатыми полюсами магнитомягкого кольцевого пазового статора и зубчатым магнитомягким магнитопроводом ротора, к постоянной составляющей этой магнитной проводимости λ0 воздушного зазора δ менее единицы [Алексеева М.М. Машинные генераторы повышенной частоты. - Л.: Энергия, 1967. - 344 с.(стр.40-41)], а относительное значение величины воздушного зазора δ к зубцовому делению TZ применительно к предлагаемому БМЭД для получения максимальной величины отношения λ1 к λ0 составляет не более 0,05 [Каасик П.Ю., Блинов И.В. Асинхронные индукторные микродвигатели устройств автоматики. - Л.: Энергоиздат. Ленингр. отделение, 1982. - 152 с. (стр.24-25); Альпер Н.Я., Терзян А.А. Индукторные генераторы. - М.: Энергия, 1970. - 192 с.(стр.118)]. Из вышеуказанного следует, что при значении отношения δ к TZ, равном 0,02÷0,05, соотношение 10≤bM/δ≤30 может быть записано в виде (0,2÷0,5)≤bM/ТZ≤(0,6÷1,5), которое показывает степень повышения моментных характеристик, энергетических показателей и использования активных материалов в предлагаемом БМЭД в ненасыщенном состоянии магнитомягкого кольцевого пазового статора и кольцевых зубчатых магнитомягких магнитопроводов ротора при выполнении втулки немагнитной и толщиной, равной или большей половины толщины bM слоя постоянных магнитов, а при их магнитном насыщении или полной электромагнитной загрузке предлагаемого БМЭД, степень влияния снижения рассеяния магнитного потока слоя постоянных магнитов и соответствующее повышение доли магнитного потока от него, участвующего в создании всех составляющих полезного момента предлагаемого БМЭД, становятся сопоставимыми с соответствующим повышением полезного момента при повышении магнитного потока в воздушном зазоре предлагаемого БМЭД.
Одновременно из вышеуказанного и согласно таблице 1 ширина bШ шлицов определяется интервалом от 0,5TZ/3 до TZ, т.е. отношение bШ к TZ составляет 0,167÷1, что соответствует отношению bM к TZ, равному 0,21÷1,5, и является большим отношения δ к TZ, равного 0,02÷0,05, на порядок и более, благодаря чему является несущественным или практически отсутствует понижающее влияние на величину полезных моментов в предлагаемом БМЭД рассеяния магнитного потока между соседними полюсами статора, образованного протекающим в катушках обмотки якоря электрическим током и не взаимодействующим с магнитным потоком в воздушном зазоре с магнитным потоком слоя постоянных магнитов, что также определяет отсутствие взаимной индуктивности обмоток якоря.
Выполнение толщины зубцов полюсов статора bZC согласно соотношению 2/3≤bZC/bZp≤1 с толщиной зубцов каждого из зубчатых магнитопроводов ротора bZP равной половине его зубцового деления TZ при выполнении геометрии воздушного зазора и конструкции предлагаемого БМЭД согласно указанным в формуле изобретения, обеспечивает уменьшение пульсаций тормозных и полезных моментов от снижения высших гармоник магнитной проводимости воздушного зазора (амплитуд и их суммы) и снижение их взаимодействия с несинусоидальным током в обмотке якоря, в частности от второй, третьей, пятой и седьмой гармоник магнитной проводимости воздушного зазора в угловом интервале единицы электромагнитной редукции. При этом вторая и третья гармоники и кратные им в функции изменения полезных моментов от угла поворота ротора в предлагаемом БМЭД практически отсутствуют или пренебрежимо малы. Как следует из расчетов и экспериментальных результатов, в т.ч. в пределах указанного соотношения bZC к bZP, пульсации тормозных и полезных моментов составляют от ±0,5% до ±3,0% относительно величины продолжительного пускового момента. При выполнении отношения bZC к bZP менее 2/3, происходит значительное уменьшение абсолютной величины полезных моментов из-за роста эквивалентной величины воздушного зазора δ (что вызывает рост магнитных сопротивлений) и как следствие снижаются взаимодействующие друг с другом (образующие полезные моменты) составляющие магнитных потоков в воздушном зазоре, образованные протекающим в катушках обмотки якоря электрическим током и слоем постоянных магнитов. При выполнении отношения bZC к bZP большим единицы интенсивно возрастают тормозные моменты и снижается величина отношения λ1 к λ0.
Выполнение активной осевой длины LC кольцевого пазового статора с зубчатыми полюсами равной LC=(2LP+bM) или LC=2LP+2LP×(N-2)+bM×(N-1) (последнее по п.2 формулы изобретения) при аксиально симметричном расположении кольцевых зубчатых магнитопроводов ротора относительно кольцевого пазового статора, при выполнении геометрии воздушного зазора и конструкции предлагаемого БМЭД согласно указанным в формуле изобретения, обеспечивает отсутствие осевых сил тяжения вследствие осевой (аксиальной) симметрии, что подтверждено экспериментально. При этом превышение активной осевой длина LC кольцевого пазового статора с зубчатыми полюсами над суммарной активной осевой длиной ротора LpA=2Lp+bM или LpA=2LP+2LP×(N-2)+bM×(N-1) (последнее по п.2 формулы изобретения) на величину 3δ (как это показано на фиг.3 и фиг.5) или ее занижение на ту же величину, обеспечивают отсутствие влияния осевых сил тяжения вследствие осевой (аксиальной) асимметрии в пределах ±δ, что также подтверждено экспериментально.
Увеличение полезного момента в большей степени, чем прямо пропорциональное увеличение числа модулей, равного N минус единица, в предлагаемом БМЭД, согласно п.2 формулы изобретения, обеспечивается за счет снижения рассеяния как магнитных потоков, образованных протекающим электрическим током в катушках сосредоточенной m-фазной обмотки якоря, так и магнитных потоков от постоянных магнитов и соответственно более эффективного магнитного использования магнитомягких магнитопроводов ротора и статора, благодаря отсутствию магнитных полей выпучивания на внутренних кольцевых зубчатых магнитомягких магнитопроводов ротора. Известно [Буль Б.К. Основы теории и расчета магнитных цепей. - М.-Л.: Энергия, 1964. - 464 с. (стр.172-181)], что указанные магнитные поля выпучивания возникают между боковыми поверхностями магнитопроводов, т.е. не являются магнитными потоками воздушного зазора БМЭД, а являются полями рассеяния и не создают в результате полезных моментов. Эти магнитные поля выпучивания возникают между торцевыми, торцевыми и радиальными поверхностями магнитомягкого кольцевого пазового статора и соответствующими торцевыми, торцевыми и радиальными поверхностями крайних кольцевых зубчатых магнитомягких магнитопроводов ротора, а при активной осевой длине LP каждого из крайних зубчатых магнитопроводов ротора, меньших в два раза активной осевой длины каждого внутреннего зубчатого магнитопровода ротора, доля полей рассеяния в снижении магнитных потоков воздушного зазора в предлагаемом БМЭД существенно ниже, и с увеличением числа модулей снижается в пропорциональной степени увеличения отношения суммарной активной осевой длины внутренних зубчатых магнитопроводов к удвоенной активной осевой длине крайнего зубчатого магнитопровода ротора.
Полученное экспериментально отношение толщины клеевого слоя bK, из высокотемпературного, не менее 200°С, клея, в частности фенолкаучукового или элементоорганического модифицированного каучуком, к толщине листа bC, удовлетворяющее условию 0,04<bK/bC<0,09, при удельном давлении перпендикулярно плоскости листов в интервале 0,784÷1,177 МПа ([7,84÷11,77]×105 Н/м2) согласно п.3 формулы изобретения, в частности при котором одновременно достигается снижение магнитного сопротивления поперечным магнитным потокам от постоянных магнитов и обмотки якоря и обеспечивается повышенное, 1-10 кОм, значение электрического сопротивления между листами холоднокатаной изотропной или анизотропной электротехнической стали (например, марки стали по ГОСТ 21427.2 или по ГОСТ 21427.1), что в свою очередь снижает потери от вихревых токов в магнитомягком пазовом статоре и в кольцевых зубчатых магнитомягких магнитопроводах ротора, наиболее эффективно для предлагаемого БМЭД, когда суммарная величина клеевых слоев в любом из крайних кольцевых зубчатых магнитомягких магнитопроводов ротора не превышает величины воздушного зазора δ. Указанное также следует из высокой степени линейности полученных механических характеристик ряда образцов одномодульных и многомодульных конструкций предложенного БМЭД.
Повышение моментных характеристик предлагаемого БМЭД при сохранении достигнутых технических результатов и преимуществ по п.1, п.2 и п.3 формулы изобретения, которое обеспечивается, согласно п.4 формулы изобретения, выполнением кольцевых зубчатых магнитопроводов ротора отдельно или одновременно с кольцевым пазовым статором из магнитомягкого сплошного материала с удельным электрическим сопротивлениям не менее 0,45·10-6 Ом·м и индукцией не менее 1,5 Тл, в частности из электротехнической кремниевой стали или железоникелькобальтового сплава, что подтверждено результатами экспериментального анализа и испытаниями ряда образцов одномодульных и многомодульных конструкций предложенного БМЭД, из которых следует, что пульсации вращающего момента снижаются по сравнению с шихтованными магнитомягкими пазовым статором и кольцевыми зубчатыми магнитомягкими магнитопроводами ротора за счет исключения четных гармоник (второй, четвертой, восьмой и т.д.) в угловом интервале единицы электромагнитной редукции, а тормозные моменты снижаются благодаря существенному уменьшению асинхронных моментов, что следует из повышения крутизны полученных механической и регулировочной характеристик, а также более чем в 1,5-2 раза частоты вращения холостого хода.
Повышение моментных характеристик и использования активных материалов предлагаемого БМЭД при сохранении достигнутых технических результатов и преимуществ по п.1, п.2, п.3 и п.4 формулы изобретения, обеспечивается, согласно п.5 формулы изобретения, выполнением кольцевого слоя постоянных магнитов из высококоэрцитивного сплава с остаточной индукцией не менее 0,8 Тл, в частности из редкоземельных материалов SmCo или NiFeBr, причем отношения толщины bM слоя постоянных магнитов к воздушному зазору δ и радиальной высоты hM слоя постоянных магнитов к активный осевой длине LP каждого из крайних зубчатых магнитопроводов ротора, удовлетворяют взаимосвязанным соотношениям 10≤bM/δ≤30 и 0,75≤hM/LP≤2,5, при этом взаимосвязь описывается линейной функцией У=f(X), где У есть bM/δ, У∈[10; 30], а Х есть hM/LP, Х∈[0,75; 2,5], что подтверждается результатами экспериментального анализа и испытаний ряда опытных образцов одномодульных и многомодульных конструкций предложенного БМЭД, из которых следует, что всегда выполняется условие превышения магнитного сопротивления слоя постоянных магнитов над суммой магнитных сопротивлений контура замыкания его магнитного потока при максимальном магнитном использовании магнитомягкого пазового статора и кольцевых зубчатых магнитомягких магнитопроводов ротора, включая их магнитное насыщение.
БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| Якорь многофазной электрической машины | 2018 |
|
RU2684898C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2018 |
|
RU2700179C1 |
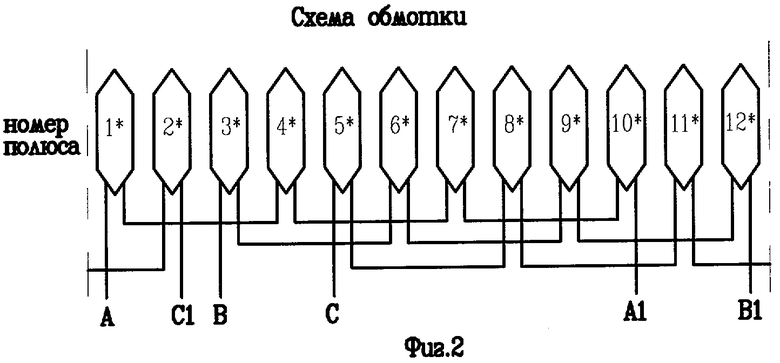
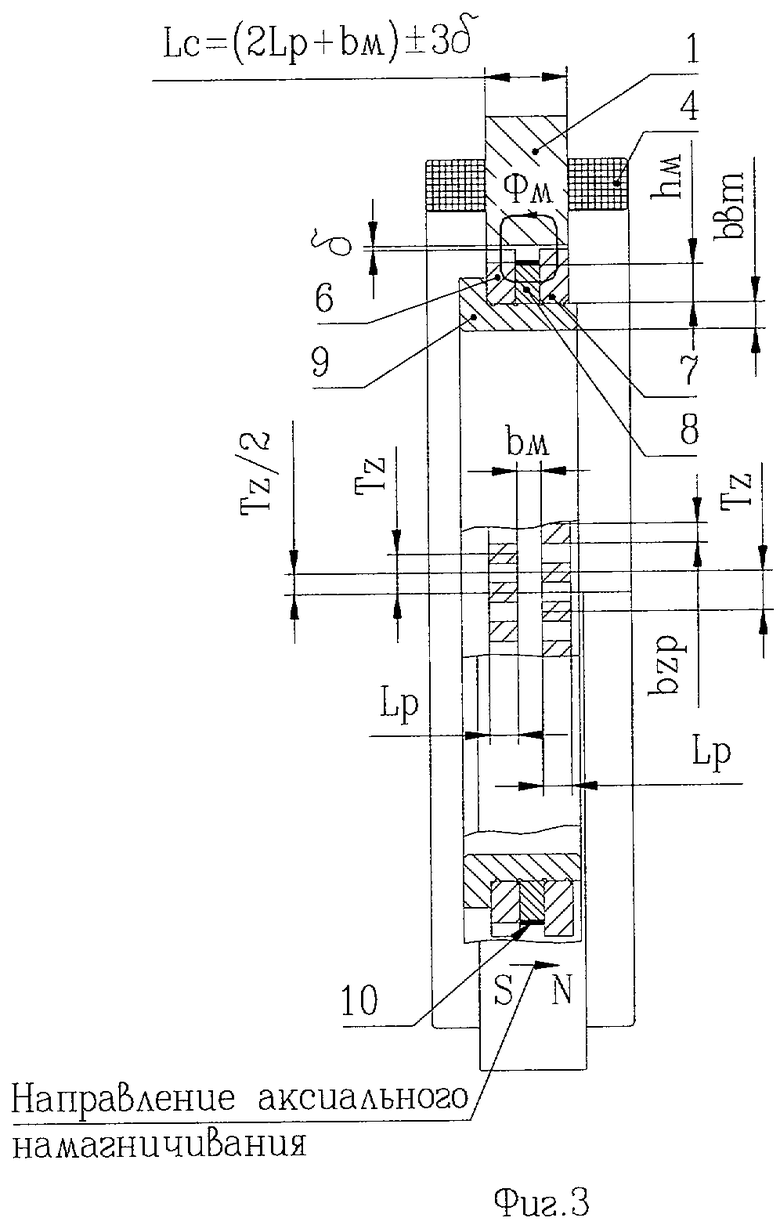
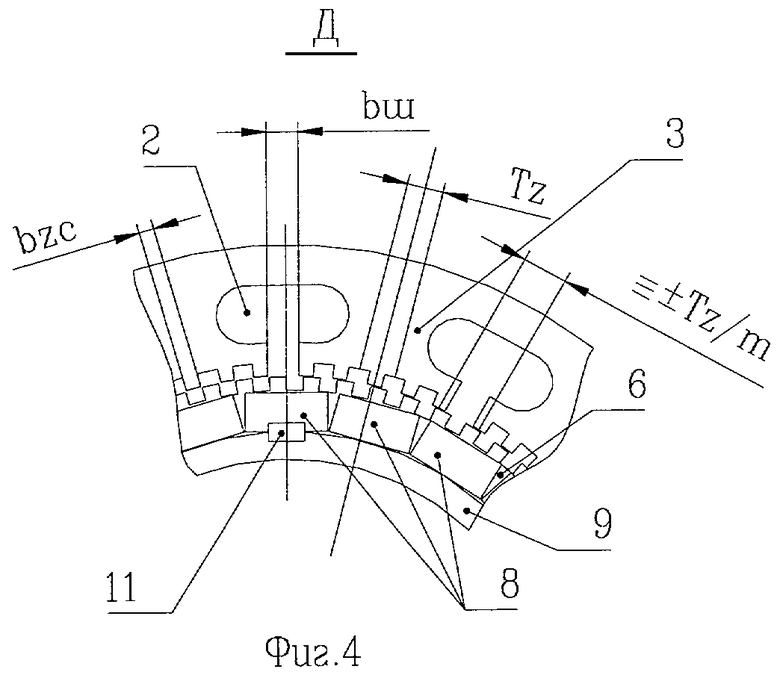
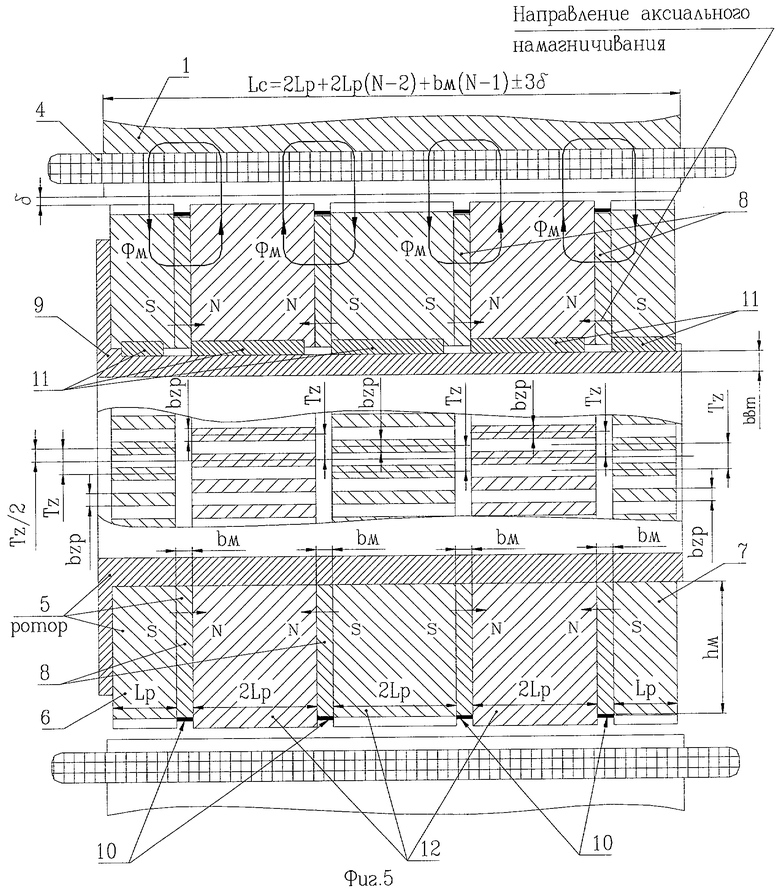
Изобретение относится к электротехнике, а именно к бесконтактным моментным электродвигателям с постоянными магнитами (БМЭД). Технический результат заключается в повышении моментных характеристик и энергетических показателей, упрощении конструкции и технологии ее изготовления, повышении использования активных материалов, уменьшении массогабаритных показателей и расширение возможностей использования электродвигателя. Для этого устройство содержит кольцевой магнитомягкий пазовый статор (ПС) с зубчатыми полюсами, выполненный шихтованным или сплошным, и с сосредоточенной m-фазной, кратной трем из равенства m=2f±1, где f равно 1, 2, 3,..., обмоткой якоря, катушки каждой фазы которой, отстоящие друг от друга на m полюсных делений статора, соединены последовательно-согласно, и ротор с соосно расположенными кольцевыми зубчатыми магнитомягкими магнитопроводами (ЗМ) числом N, выполненными шихтованными или сплошными, с равными друг другу зубцовыми делениями TZ, с равным числом зубцов ZR кратным 2n при n, равном 2, 3, 4.... Число N ЗМ не менее двух, причем при N большим двух, два - крайние с равной осевой длиной LP, а N минус два - внутренние, активная осевая длина каждого из которых равна друг другу и выполнена равной удвоенной Lp. Каждые соседние ЗМ развернуты друг относительно друга на половину TZ. Между соседними ЗМ размещен слой аксиально намагниченных в одном направлении постоянных магнитов (ПМ) толщиной bМ, а число ПМ равно N минус единица. При N ЗМ большим двух между ними поочередно размещены по одному ПМ, каждый из которых выполнен с равной друг другу толщиной bМ. Соседние ПМ, разделенные одним внутренним ЗМ, намагничены в противоположных относительно друг друга аксиальных направлениях. ЗМ и ПМ установлены на общую немагнитную втулку толщиной большей половины толщины bМ слоя ПМ. Толщина зубцов bZP каждого из ЗМ равна половине Tz. Полюса Р ПС и ЗМ обращены друг к другу и разделены воздушным зазором 5. Число полюсов Р определяется как Р=2m×2S, где s равно 0, 1, 2,..., на которых размещено нечетное число зубцов ZC толщиной bzc, при этом их зубцовые деления равны TZ, а оси зубцов соседних полюсов смещены относительно друг друга на величину, пропорциональную отношению ±TZ к m. Ширина шлицов между полюсами статора bШ не менее десятикратной величины воздушного зазора и определяется как bШ=TZ×[(1±1/m)-bZC/TZ]. Число зубцов ZR определяется как ZR=P×(ZC±1/m), a bZC и bZP связаны соотношением 2/3≤bZC/bZP≤1. ПМ выполнены из высококоэрцитивного сплава толщиной bМ и радиальной высотой hМ, удовлетворяющих взаимосвязанным соотношениям 10≤bМ/δ≤30 и 0,75≤hМ/LР≤2,5. Активная осевая длина LC ПС определяется как LC=2Lp+2Lp×(N-2)+bM×(N-1), a ЗМ ротора расположены относительно ПС аксиально симметрично. 4 з.п. ф-лы, 5 ил., 3 табл.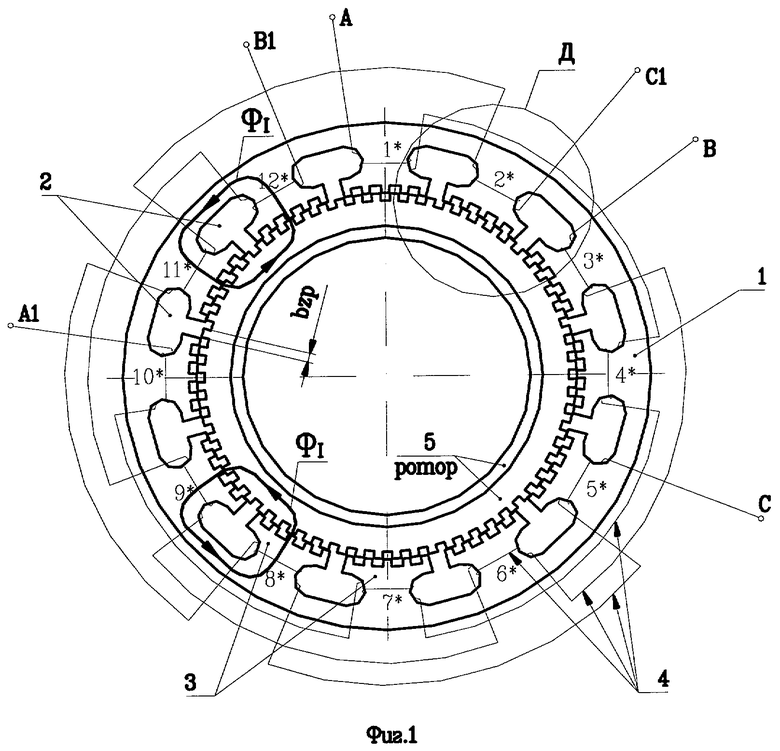
| ДЕМАГИН А.В | |||
| Электрические машины для непосредственного привода приборных систем | |||
| Обзоры по судостроительной технике | |||
| Институт «РУМБ» | |||
| - Л.: ЦНИИ «РУМБ», Научно-производственное объединение «АЗИМУТ», 1991, с.80 | |||
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2195066C2 |
| ОДНОФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 0 |
|
SU252451A1 |
| СИНХРОННЫЙ РЕДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 0 |
|
SU278852A1 |
| Тиристорный регулятор секционированной нагрузки | 1981 |
|
SU1003270A1 |

