Изобретение относится к области электромеханики и может быть использовано в вибрационных и вибрационно-ударных устройствах для получения механических колебаний, применяемых в различных вибротехнологиях, например, для нанесения изображений на твердые поверхности путем направленного программно-управляемого разрушения поверхности методом удара.
Известно устройство - электромагнитный вибратор ([1] патент SU 1040573 от 23/05/1986 г.), содержащий статор с обмоткой переменного тока, размещенный на явно выраженных симметрично расположенных по окружности полюсах, и явнополюсный якорь, полюсное деление которого равно полюсному делению статора, полюса якоря выполнены в виде двух групп, сдвинутых в противоположных направлениях относительно оси симметрии на половину ширины полюса. Статор и якорь связаны между собой подшипниками качения, а также упругими элементами, которые приводят при обесточенных обмотках статора в нейтральное положение рычаг, жестко закрепленный на валу ротора.
Известен электромагнитный вибратор ([2] патент SU 1469532 от 30/03/1989 г.), содержащий симметричный явнополюсный статор с обмоткой на полюсах, состоящей из двух параллельных ветвей, внутри которого размещен четырехполюсный якорь, полюса якоря смещены по окружности на половину ширины полюса статора попарно по и против часовой стрелки и несут параллельные ветви обмотки статора, пульсирующий ток в которые подается от источника переменного тока через выпрямительные элементы. В ярме между его полюсами, подсоединенными к выпрямительным элементам, выполнены дополнительные зазоры, заполненные немагнитным материалом, которые позволят исключить потоки рассеяния в магнитопроводе. Статор и якорь связаны между собой подшипниками качения, а также упругими элементами, которые приводят при обесточенных параллельных ветвях обмотки статора в нейтральное положение рычаг, жестко закрепленный на валу ротора.
Известен электромагнитный вибратор ([3] патент SU 1820460 от 07/06/1993 г.), содержащий статор с восемью полюсами, равномерно-распределенными по окружности и оснащенными намотанными на них катушками обмотки переменного тока, состоящей из двух параллельных ветвей, которые присоединены к источнику питания при помощи выпрямительных элементов, причем выпрямительные элементы включены встречно, и через них в параллельные ветви обмотки статора подается пульсирующий ток. Внутри статора на валу при помощи шпонки закреплен якорь, выполненный явнополюсным, причем число полюсов якоря равно числу полюсов статора. Полюса якоря выполнены в виде двух групп, сдвинутых в противоположных направлениях на половину ширины полюса относительно оси симметрии, проходящей в нейтральном его положении посередине немагнитных зазоров, выполненных в ярме статора между полюсами, катушки которых принадлежат к разным параллельным ветвям обмотки переменного тока. Статор и якорь связаны между собой подшипниками, а также упругими элементами, которые приводят при обесточенных параллельных ветвях обмотки статора в нейтральное положение рычаг и, соответственно, якорь; рычаг жестко закреплен на валу вибратора, и рабочий орган в зависимости от требуемой линейной амплитуды колебаний может быть закреплен как на валу вибратора, так и на рычаге на соответствующем расстоянии от вала. Между смежными полюсами статора, катушки которых принадлежат к разным параллельным ветвям, выполнены дополнительные зазоры в ярме статора, заполненные немагнитным материалом.
Также известно устройство - колебательный шаговый двигатель ([4] патент US 5,126,605 «Oscillating Stepper Motor» от 30.06.1992 г.), включающий:
(a) однофазную кольцевую катушку статора, определяющую центральную цилиндрическую полость, указанная кольцевая катушка статора создает магнитное поле первой полярности, когда электрический ток проходит через нее в первом направлении;
(b) цилиндрический ротор, включающий роторный магнит, расположенный для вращательного движения относительно указанной кольцевой катушки статора в указанной центральной цилиндрической полости и соосно указанной кольцевой катушкой статора; указанный цилиндрический ротор, в зависимости от указанного магнитного поля первой полярности, создаваемого в указанной кольцевой катушке статора, может вращаться меньше чем на 180 градусов от стопорного положения к первому положению, определенному указанным магнитным полем указанной первой полярности; и
(c) стопорный магнит, фиксирование расположенный с учетом указанной катушки статора в указанной цилиндрической полости, для вращения указанного ротора к указанному стопорному положению, всегда, когда указанная кольцевая катушка статора обесточивается
Известно устройство - роторный привод ([5] патент US 4,795,929 «Rotary Actuator» от 03.01.1989 года), имеющий постоянный магнитный якорь с диаметрально противоположными полюсами различной полярности, установленный между парой статорных элементов, по крайней мере, один из которых является электромагнитом, так, что имеет возможность вращаться между первым и вторым положением при создании выбранного распределения потока хотя бы в одном электромагнитном статорном элементе. Электромагнитный статорный элемент создан так, что он создает ассиметричное магнитное поле, которое больше вблизи одного из противоположных полей якоря, чем в другом. Электромагнитный статор состоит из сердцевины из мягкого железного материала и внутренней поверхностью повернут к ротору. Катушка намотана на сердцевину так, чтобы создавать на сердцевине магнитные силовые поля на каждой поверхности сердцевины. Ассиметричное поле потока создается путем предоставления внутренней стороны сердцевины большего сегмента, увеличивающего поле потока и плотность в заданном месте и поля поменьше для остальной части сердцевины. Предпочтительно больший сегмент поверхности сердцевины вытянут наружу и тесно расположен к поверхности якоря для выбранного дугового расстояния.
В частности, привод включает пару электромагнитных статоров, каждый из которых имеет не магнитопроводимое ядро и катушку, взаимодействующих для создания первого и второго полюса. Статоры фиксировано закреплены на расстоянии друг против друга, их полюсы лежат на общей оси намагничивания, и имеют ассиметричную форму для предоставления большего силового поля одной стороне намагничивания, чем другой. Якорь, состоящий из цилиндрического постоянного магнита, имеющего противоположные первый и второй полюсы, лежащие вдоль диаметральной полюсной оси, закреплен с возможностью вращения между противоположными статорами так, что диаметральная полюсная ось изначально идет поперечно оси намагничивания статоров. Электрическая цепь выборочно подает напряжение электромагнитным статорам так, чтобы индуцировать на первом и втором полюсе управляемых статоров, прямо и обратно соответственно, для принуждения силового ноля притягивать или отталкивать полюс вышеуказанного цилиндрического магнита, лежащего на той же стороне оси намагничивания, чтобы заставить якорь вращаться.
Отличительные особенности объекта, защищаемого в заявке, и устройств-прототипов станут явными после приведенного далее описания и основных признаков промышленного шагового двигателя, который используется в предлагаемой заявке ([6] Кенио Т. Шаговые двигатели и их микропроцессорные системы управления. - М.: Мир, 1987; [7] Андреев В.П., Сабинин Ю.А. Основы электропривода. - М.; Л.: Госэнергоиздат, 1963. - 772 с.; [8] Гулин В.Ф., Калитинская Т.В. Следящий шаговый электропривод. - Л.: Энергия, 1980. - 168 с.; [9] Карпенко Б.К., Ларченко В.И., Прокофьев Ю.А. Шаговые электродвигатели. - К.: Технiка, 1972. - 216 с.).
Существуют три основных типа шаговых двигателей:
- двигатели с переменным магнитным сопротивлением,
- двигатели с постоянными магнитами,
- гибридные двигатели.
Дадим краткую характеристику каждого из них.
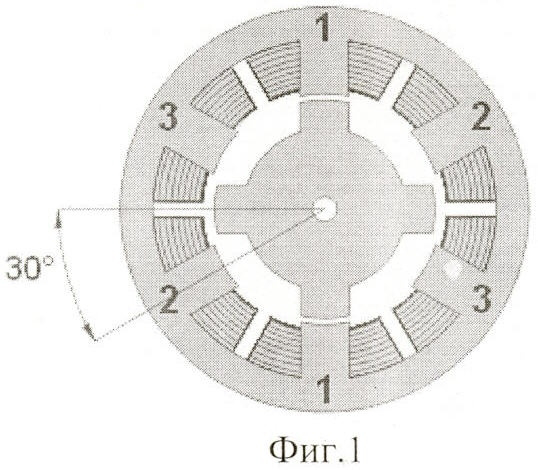
Шаговые двигатели с переменным магнитным сопротивлением имеют статор с несколькими полюсами и ротор зубчатой формы из магнитомягкого материала (фиг.1). Намагниченность ротора отсутствует. Для простоты рассмотрения на фиг.1 ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые фазовые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Шаг такого двигателя равен 30°.
При включении тока в одной из катушек ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, обмотка которых находится под током. Если затем выключить эту обмотку и включить следующую, то ротор изменит свое угловое положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее число полюсов статора и зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага (порядка нескольких градусов).
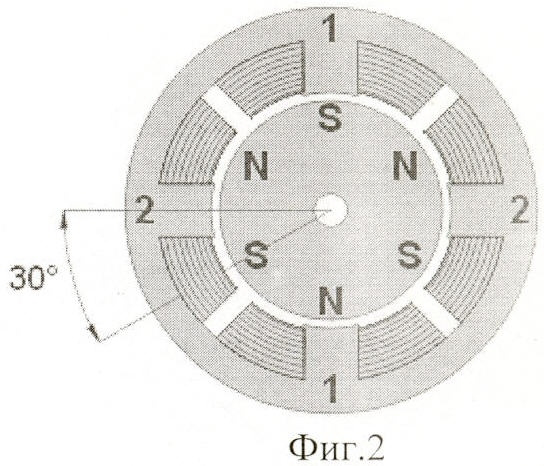
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (фиг.2). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора, в таких ШД обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на фиг.2 двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Каждая из независимых обмоток намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30°. При включении тока в одной из катушек ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения необходимо включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48-24 шага на оборот (угол шага 7.5°-15°).
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает его максимальную частоту вращения. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
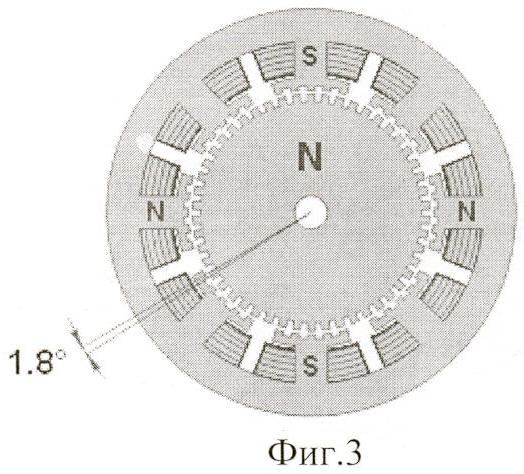
Гибридные ШД являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных ШД составляет от 100 до 400 (угол шага 3.6°-0.9°). Гибридные ШД сочетают в себе лучшие свойства двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного ШД имеет зубцы, расположенные в осевом направлении (фиг.3).
Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки - южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного ШД также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6° двигателей и 8 основных полюсов для 1.8° и 0.9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть - между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя
S=360/(Nph*Ph)=360/N,
где Nph - число эквивалентных полюсов на фазу = число полюсов ротора,
Ph - число фаз,
N - полное количество полюсов для всех фаз вместе.
Ротор показанного на фиг.3 двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное число полюсов - 200, а шаг, соответственно, 1.8°.
Большинство современных промышленных шаговых двигателей являются гибридными. По сути, гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы. Чаще всего они имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6° или 1.8°.
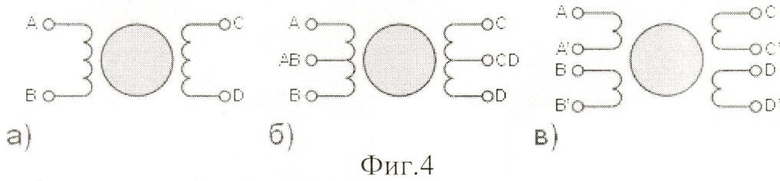
В зависимости от конфигурации обмоток промышленные ШД подразделяются на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер или полумостовой с двухполярным питанием. Всего биполярный ШД имеет две обмотки и, соответственно, четыре вывода (фиг.4а).
Униполярный ШД также имеет одну обмотку в каждой фазе, но от середины обмотки сделан вывод. Это позволяет изменять направление магнитного поля, создаваемого соответствующей обмоткой, простым переключением половинок обмотки. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри ШД, поэтому такой двигатель может иметь 5 или 6 выводов (фиг.4б). Иногда униполярные ШД имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому у такого ШД всего 8 выводов (фиг.4в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный ШД с двумя обмотками и выводами тоже можно использовать в биполярном режиме, если выводы оставить неподключенными.
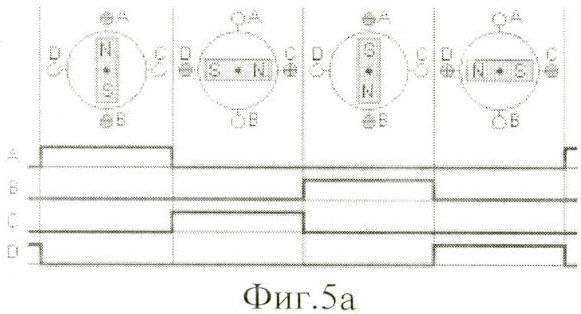
Существует несколько способов управления фазами шагового двигателя. Первый способ обеспечивается попеременной коммутацией фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (фиг.5а). Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного ШД.
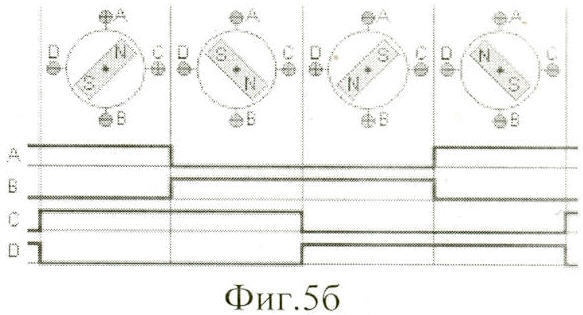
Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (фиг.5б), и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же по величине шаг, как и первый способ, но положение точек равновесия ротора смещено на полшага.
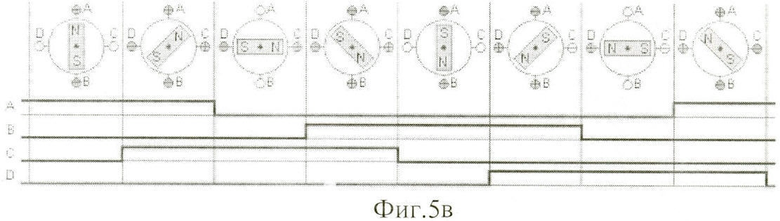
Третий способ является комбинацией первых двух и называется полушаговым режимом, когда ШД делает шаг, равный половине основного (фиг.5в).
Таким образом, основными признаками шагового двигателя, используемого в заявке в качестве возбудителя колебаний, являются следующие:
1. Угол поворота ротора пропорционален количеству входных импульсов управления, а угловая скорость вращения вала ротора пропорциональна частоте следования импульсов управления.
2. Крутящий момент, необходимый для вращения вала ротора шагового двигателя создается коммутацией фазовых обмоток. Шаговый двигатель имеет минимум две фазовые обмотки.
3. Шаговый двигатель в режиме остановки, когда обмотки не запитаны, обеспечивает небольшой по величине момент, называемый моментом удержания, а в случае, когда обмотки запитаны, то обеспечивает максимальный момент, прецизионное позиционирование и повторяемость, то есть ему присуща однозначная зависимость положения ротора от входных импульсов.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Реверс ШД может быть осуществлен на любом шаге за счет изменения знака вращающего момента. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая зависит от тока в обмотке и количества витков. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное устойчивое положение, он будет находиться в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и примет одно из следующих ближайших положений равновесия.
В описании устройств-прототипов [1]-[3] нигде не упоминается, что возбудителем колебаний является шаговый двигатель; сами устройства не обладают признаками шагового двигателя и не являются шаговыми двигателями - это типичные электромагнитные вибраторы, которые внешне похожи на шаговые двигатели, но управляться и работать как шаговые двигатели не могут. Приведенный электромагнитный вибратор - это специальный электрический однофазный синхронный двигатель переменного тока промышленной частоты с несимметричным ротором и симметричным статором, обмотки которого включены по схеме двухполупериодного выпрямления. Такой электродвигатель не имеет основных признаков шагового двигателя, перечисленных выше. С точки зрения конструкции устройство [4] хотя и внешне похоже на серийный шаговый двигатель с магнитным ротором, но не является шаговым двигателем и работать как шаговый двигатель не может. В отличие от шагового двигателя колебательный шаговый двигатель имеет только одну фазу статора, и колебательные движения совершаются только изменением направления тока в этой фазовой обмотке. Кроме того, принципиальной особенностью колебательного шагового двигателя, не позволяющей быть ему классическим шаговым двигателем, является наличие, кроме однофазного статора и постоянного магнитного ротора, фиксирующего постоянного магнита. Ротор в такой конструкции не может непрерывно вращаться на бесконечное число оборотов как в классическом шаговом двигателе, а может только лишь поворачиваться на определенный угол, величина которого пропорциональна току, подаваемому на однофазную обмотку статора.
Кроме того, существенным недостатком всех устройств-прототипов является то, что в них нет возможности настройки положения ротора относительно статора - это устойчивое положение изначально задано, определяется взаимным расположением магнитного ротора и элементов статора, и для регулирования положения оси необходимо подавать напряжение или подбирать новый магнит. Во многих приложениях, например при гравировании, необходима периодическая настройка первоначального устойчивого положения оси коромысла, а следовательно и рабочего инструмента, в плоскости его колебаний.
Необходимо отметить также, что заявляемое устройство с использованием шагового двигателя является устройством ударного действия, а прототипы по своему функциональному назначению не относятся к подобным устройствам.
Следовательно, автору неизвестны случаи применения шагового двигателя с приведенными выше признаками в роли возбудителя колебаний в механических системах.
Целью изобретения является построение простого по конструкции, надежного электромеханического виброгенератора минимальной себестоимости, обеспечивающего максимально возможный коэффициент полезного действия, удельной энергии удара и минимального потребления при оптимальных габаритах.
Поставленная цель достигается тем, что в качестве возбудителя механических колебаний применяется серийно изготавливаемый промышленностью шаговый двигатель (ШД), имеющий следующие преимущества, определяющие, в первую очередь, качество возбудителя колебаний:
- обеспечение требуемого момента в режиме виброудара;
- возможность быстрого старта, остановки, реверсирования;
- высокая надежность, связанная с отсутствием щеток;
- большой срок службы;
- низкая стоимость;
- возможность получения высокого значения момента вращения на валу двигателя без промежуточного редуктора;
- большой диапазон скоростей, скорость пропорциональна частоте входных управляющих импульсов.
На фиг.1 показан шаговый двигатель с переменным магнитным сопротивлением.
На фиг.2 показан шаговый двигатель с постоянными магнитами.
На фиг.3 показан гибридный шаговый двигатель.
На фиг.4 показаны фазы обмоток биполярного (а) и униполярного (б), (в) шагового двигателя.
На фиг.5 показаны различные способы управления шаговым двигателем - полношаговый режим с включением одной фазы (а), полношаговый режим с включением двух фаз (б) и полушаговый режим (в).
На фиг.6 представлена схема электромеханического виброгенератора с использованием серийного промышленного шагового двигателя.
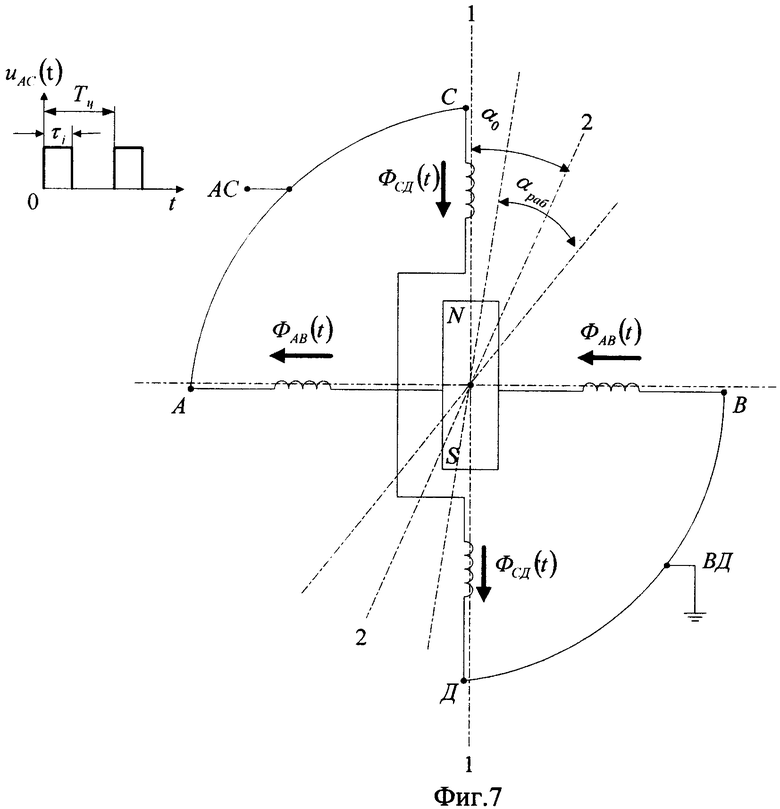
На фиг.7 приведен вариант подключения фазовых обмоток АВ и СД гибридного шагового двигателя, используемого как возбудитель колебаний.
Предложенное устройство выполнено следующим образом. Электромеханический виброгенератор (фиг.6) содержит ШД 1, на фазовые обмотки АВ и СД которого поступают управляющие импульсы 2. На вал 3 ШД 1 установлены рычаги 7, 8, 9 при помощи элементов крепления, например коромысла 4, жестко связанного с валом 3 ШД 1, Верхние части рычагов 7, 8, 9 взаимодействуют с пружинами 10, 11, 12, 13. Другими концами пружины связаны с корпусом ШД или с дополнительным корпусом 6, жестко связанным с корпусом ШД. Вал ШД 1, а также рычаги 7, 8, 9 выполнены с возможностью совершать угловые колебательные движения вместе с валом ШД 1 относительно его оси вращения. Пружины 10, 11, 12, 13 выбираются по жесткости и настраиваются по длине так, чтобы обеспечить оптимальные по амплитуде и частоте колебания вала ШД. Это можно делать, например, с помощью регулировочных винтов 16, 17, 18, 19. Одним из таких оптимальных положений является такое, когда амплитуда колебаний коромысла максимальна, что соответствует положению 2-2, повернутому относительно начального положения 1-1 (фиг.7). Не исключается работа системы с одним рычагом 7 и пружинами 10 и 11 в паре или рычагами 8, 9 и пружинами 12 и 13 в паре, или с другими комбинациями рычагов и пружин.
Электромеханический виброгенератор работает следующим образом. При включении вал ШД занимает положение 1-1 (фиг.7), благодаря моменту удержания. С помощью регулировочных винтов 16, 17, 18, 19 настраивается новое положение 2-2 вала, соответствующее повороту его на угол α0, относительно оси 1-1 (фиг.7), которое обеспечивает максимальную амплитуду колебания коромысла 4. На фазовые обмотки АВ и СД ШД 1 поступает сигнал управления 2 в виде импульсов напряжения uAC(t) (фиг.7), в результате чего под действием изменения потоков электромагнитного поля ФАВ(t) и ФСД(t) ротор 15 (фиг.6), жестко связанный с валом 3 ШД, начинает вращательное движение вокруг своей оси. Для контроля текущего положения вала ШД, если это требует алгоритм управления, используется датчик его углового перемещения 14. Вал 3 ШД 1 приводит в движение коромысло 4 со связанными с ним рычагами 7, 8, 9. Угловое движение коромысла 4 относительно оси вращения вала 3 ШД ограничены действием пружин 10, 11, 12, 13, соединяющих рычаги 7, 8, 9 с корпусом 6 ШД. Под действием импульса сигнала управления 2 вал 3 ШД поворачивается на угол αраб (фиг.7), деформируя при этом пружины 10, 11, 12, 13 (фиг.6). С момента окончания импульса до поступления нового сигнала управления ротор ШД под действием упругих сил пружин 10, 11, 12, 13 и момента управления, вызванного изменением чередования фаз включения обмоток статора ШД 1, если это требует алгоритм управления, начинает движение в обратном направлении. Момент времени завершения обратного хода вала 3 ШД 1 и подачи следующего сигнала управления на фазовые обмотки статора ШД определяется, если это требует алгоритм управления, с помощью датчика углового положения 14 вала 3 ШД 1. Таким образом, вал 3 ШД 1 вместе с коромыслом 4 начинает совершать колебательные движения вокруг своей оси. Динамика колебательного движения электромеханического виброгенератора зависит от геометрического расположения рычагов 7, 8, 9 и пружин 10, 11, 12, 13 относительно продольной оси 5 коромысла 4 и оси вращения вала 3 ШД 1, жесткости этих пружин, а также геометрических и массовых параметров элементов, связанных с валом 3 ШД 1, которые влияют на долговечность работы узлов ШД 1, а следовательно, и всего электромеханического виброгенератора.
Изобретение относится к электротехнике и может быть использовано в вибрационных и вибрационно-ударных устройствах для получения механических колебаний, применяемых в различных вибротехнологиях, например, для нанесения изображений на твердые поверхности путем направленного программно-управляемого разрушения поверхности. Технический результат состоит в повышении надежности, кпд удельной энергии удара при минимальном потреблении и оптимальных габаритах. Виброгенератор содержит шаговый двигатель, на фазовые обмотки которого поступают управляющие импульсы. На вал шагового двигателя жестко установлено коромысло с рычагом и ударным инструментом на конце коромысла. Продольная ось коромысла перпендикулярна оси вращения вала. Оно снабжено рычагами, концы которых соединены с пружинами, связывающими в результате вал с корпусом. Коромысло и рычаги выполнены с возможностью совершать угловые колебательные движения относительно оси вращения вала. При подаче сигналов управления на обмотки статора шагового двигателя ударный инструмент совершает угловые колебательные движения относительно оси вращения вала. Момент времени подачи сигналов управления определяют по показаниям датчика углового положения вала. 1 з.п. ф-лы, 7 ил.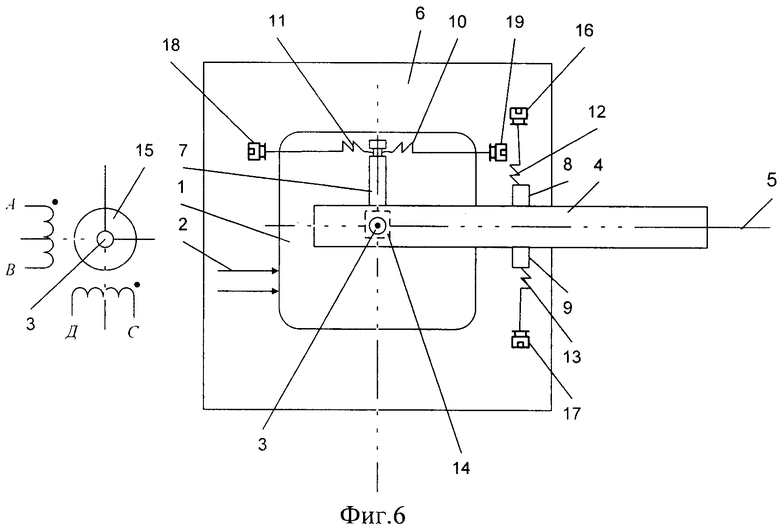
1. Возбудитель механических колебаний, включающий шаговый двигатель, отличающийся тем, что шаговый двигатель снабжен пружинами, ограничивающими угол поворота шагового двигателя под действием импульса управления, поступающего на фазовые обмотки шагового двигателя, и возвращающими вал шагового двигателя в обратном направлении в интервале времени между двумя последовательными импульсами управления, поступающими на фазовые обмотки шагового двигателя.
2. Возбудитель механических колебаний по п.1, отличающийся тем, что дополнительно включает коромысло с рабочим инструментом, установленные на валу шагового двигателя, и датчик углового положения вала.
| Электромагнитный вибратор | 1982 |
|
SU1040573A1 |
| Электромагнитный вибратор | 1987 |
|
SU1469532A2 |
| Электромагнитный вибратор | 1990 |
|
SU1820460A1 |
| ВИБРОВОЗБУДИТЕЛЬ | 2004 |
|
RU2273530C1 |
| RU 2007105209 A1, 20.02.2008 | |||
| RU 2007105210 A1, 20.02.2008 | |||
| US 4795929 A, 03.01.1989 | |||
| DE 19816201 A1, 15.10.1998 | |||
| Способ лечения язвенной болезни и хронического гастрита с повышенной секрецией | 1978 |
|
SU668683A1 |
| US 3343012 A, 19.09.1967 | |||
| US 5126605 А, 30.06.1992 | |||
| Колодочный тормоз | 1988 |
|
SU1569321A1 |
| КЕНИО Е | |||
| Шаговые | |||

