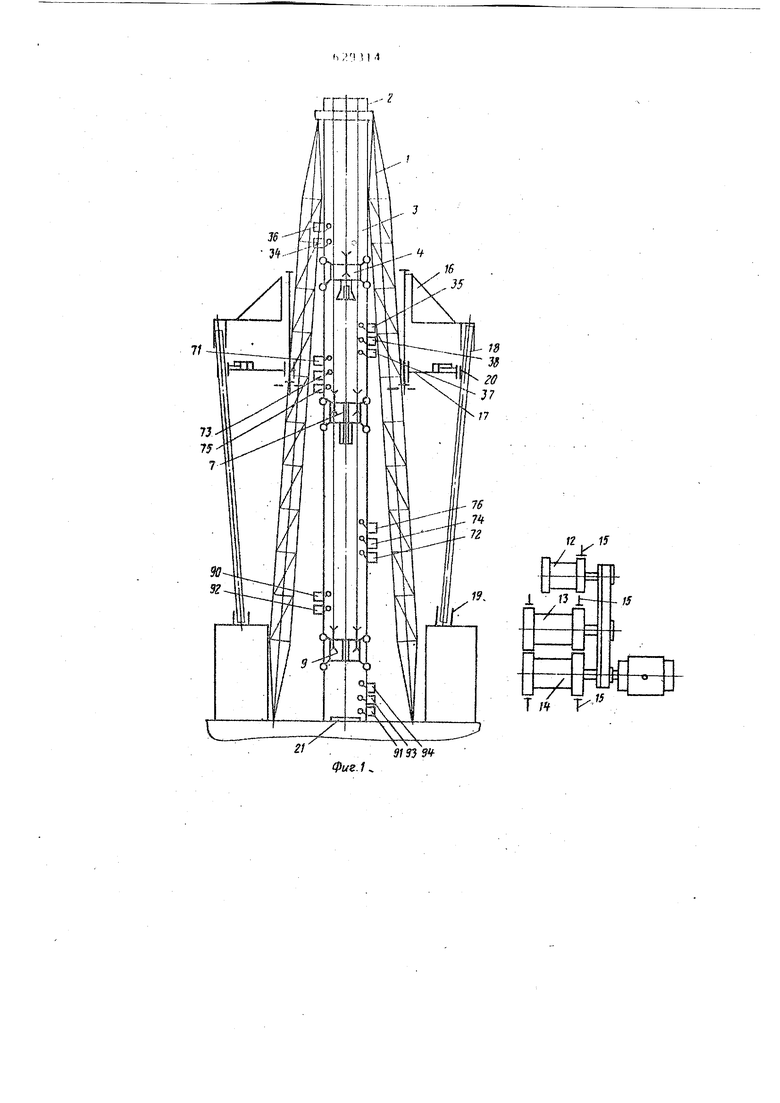
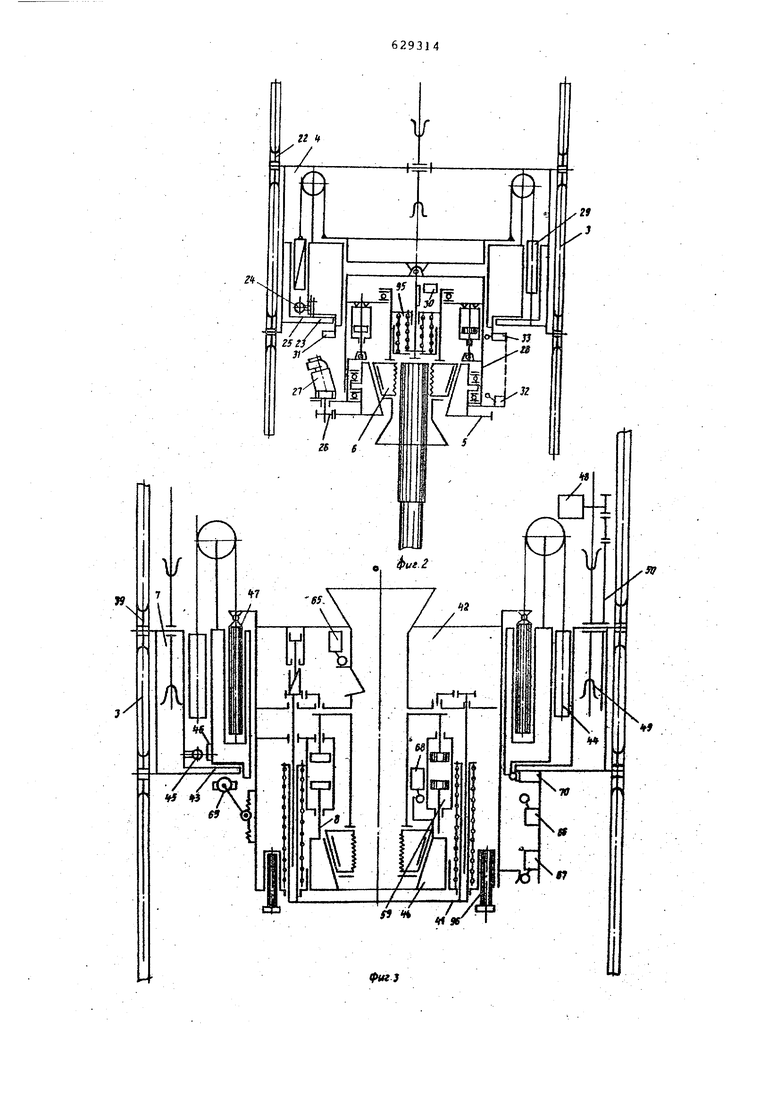
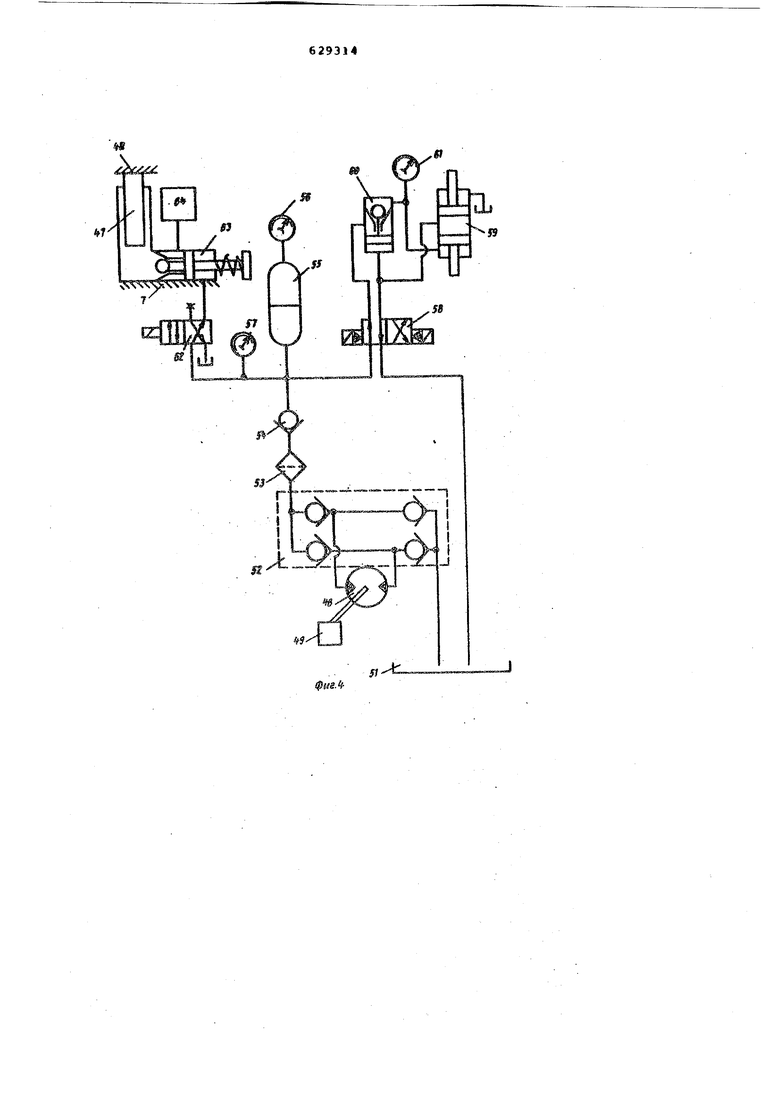
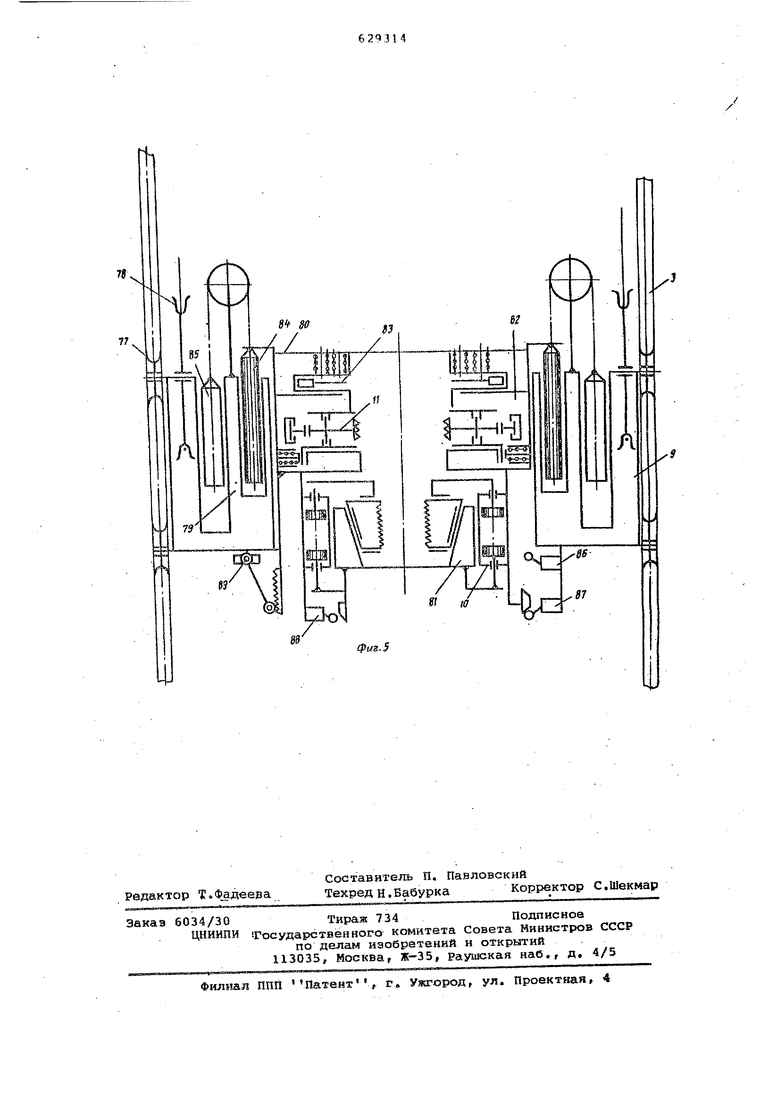
Изобретение относится к устройствам для автоматизации спуско-подъем ных операций в буреяии, применяемым В нефтяной и газовой промышленности. Известны буровые установки, содер жатие цепные подъемники для перемещения элеваторов, механизйов соединения-отсоединения труб, устройства их; подачи и укладки в магазин М . В таких установках скорость подъе ма колонны ограничена не только временем развинчивания резьбового соеди ения ключом, ио также временем цик%ia перемещения механиэмов соединения отсоединения, закрепленных на цепи для периодического размещения их в исходгное положен ие. Известна также буровая установка, содержащая два элеватора (верхний и нижний) на каретках, раскрепитель резьбовых соединений на корпусе нижнего элеватора, ключ и механизм приподъема отсоединенной трубы на верх ней каретке над верхним элеватор 1, свечеподающее устройство со свечеприемниками pj. При подъеме колонны нижним элеватором раскрепителем страгивают резьбовое соединение верхней трубы с колонной, верхний нагруженный элеватор В это время опускается с замедлением, останавливается, поднимается, его догоняет, нижний элеватор, после чего вес колонны передается на верхний элеватор. Затем нижний элеватор открывается и с ускорением движется вниз, замедляя движение у своего крайнего нижнего положения. К моменту передачи веса колонны верхнему элеватору верхнее резьбовое соединение раскреплено и В работу вступает ключ на верхней каретке, который отвинчивает верхнюю трубу к моменту достижения своего верхнего крайнего положения верхним элеватором, после чего механизм пряподъема свечи выводит ниппель верхней трубы из муфты, труба отводится в сторону к свечеподающи у устройству и далее в ) свечеприемники..,К моменту отсоединения верхней трубы нижний леввтор достигает своего нижнего крайнего положения, останавливается и начинает движение вверх, затем захватывает колонну, одновременно с верхним элеватором, принимает на себя вес колонны, вступает в работу докрепитель-раскрепитель резьбовых соединений. Верхний элеватор освобождает колонну и начинает движение вниз до встречи с нижним элеватором и так в62 далее. При спуске колонны операции Проводятся в обратном порядке. Предельная скорость иепрерывного Спуско-подъемя у такого устройства авна ходу верхнего элеватора, деленйому на время свинчнвания-развипчивания клк.чом замкового соединения. ЭтоОбъясняется тем/ что спуск-полъем колонны осу111ествляется двумя подъемиьгмн устройстгзами, попеременно спусkarotntiMn (подиимагощими) колонну, следовательно, свинчивание-развинчивание замкового соединения необход1адо завершить к моменту перехвата передачи веса колонны от однЪго подъемного устройства к другому. Поэтому операция сиинчнвапия-раэвинчивани ограничинает возможность рационального увеличения моииюсти подъемников, ограиичлшает увеличение скоростей подъема бурильной колонны. При этом элеэа.торы жестко соединены со своими каретками, управление проводится путем соблидаения строгой последователь ности во времени операций, что воз лииь при очень незначительных расхождениях длин бУрильных труб и требует высокоточньк следяШ« систем для управления скоростью , и положением злеваторов при передаче веса колонны от одного - к другому. На практике это вызовет отказ автоматической системы и переход на раздеуть™ ную работу механизмовF возможно с иргоглеиением Р5чного управления; что в конечном счетеf приведет к увеличенило затрат времени на спускопод-ьем.чыа операции. , Цель изобретения заключается в разработ1се автомата для спуска-подъе ма операций в бурении, позволяющего /окорить непрерьгоный спуско-подъем бурильной колонны. Это достигается тем, что автомат имеет дополнительную каретку с клю чом, размещенную на направляююлх выше верхнего эленатора, причем ключ снабжен гидроцилимдром, установленнь с возможностью горизонтального перемещения относительно каретки. Благодаря расположению ключа над BepxHsiM элеватором в автомате исклю чается Необходимость завершения еви чивания-развннчиЬания замкового сое динения к моменту передачи веса бурнльной колонны от одного подъемног механ-изма к другому. Развинчивание начинается после первоначального ра крепления замкового-соединения.докрю пителем-раскрюпителем, ус-ганозлекнт на нижнем элеваторе, и прюдолжается при. подъе.ме бурильной колонны этим элеватором, передаче веса колонны верхнему элеватору и подъеме ее последним. Это оэначеет, что при про чнх равных условиях за время с1бинчи ваиия-развинчинания замкового соединения пройден путь равный двум ходам элеватора. Следовательно, o6e ечивается ускорение ненрерЕлгвного пуска-подъема в два раза. На фиг. .1 схематически изображен редЛагаемЕлй автомат, общий вид; на иг. 2 -дополнительная верхняя каетка и ключ с захватом; на фиг. 3 ерхняя каретка с элеватором; на иг; 4 дана принципиальная гидравическая схема управления элеватором и гидроупорами; на фиг. 5 схематиески изображена нижняя каретка элеватора, общий вид, и докрепительраскрепитель на ней. Автомат для спуско-подъемных oneраций в бурении состоит из вышки 1, несущей в верхней части кроиблочную площадку с кронблоксм 2. На жестких направляющих 3 соосно и подвижно ус-тановлены сверху вниз каретка 4 с ключом 5 и его захватом 6, каретка с верхним элеватором 8 и каретка с нижним элеватором 10 и докрепителем-раскрепиТелем И, Каждая из кареток 4, 7 и 9 имеет собственный привод в в.иде подъемника, который например, может быть одним из барабанов 12, 13 и 14 трехбарабанной лебедки.. Кажддлй барабан связан с одной из кареток 4, 7 и 9 канатом через кронблок 2 и соответственно снабжен ус-, тройством автоматического включения, выключения и регулирования скорости их вращения. Системы автоматического регулирования (не показаны), тормозных моментов на тормозных шкивах барабанов 12, 13 и 1-4 выполнены как электрогидравлические с использованием колодочных тормозов15. На вьшке 1 установлено свечеподающее устройство 16, которое имеет два подающих п.оворотных рычага 17 для круговой установки свеч в свечеприемники (верхние 18 и нижни§ 19), Захватный орган 20 каждого рычага 17 может перемещаться горизонтально-пв раллёльно оси перемещения последнего и вертикально-параллельно оси скважины. Ротор 21 бурового автомата выполнен подвижным в направлении, перпендикулярном к оси скважины. Каретка 4, на которой установлен ключ 5, снабжена роликами 22, удерживающими ее в чаправляквднх 3 вышки 1. Ключ 5 снабжен захватся б, которой может перемещаться по направлякицим 23 каретки 4 в вертикальном направ лении ив горизонтальном направлении относительно каретки в сторону захватных органой 20 свечеподанядего устройства 16 гидроцилиидрами 24 .через зубчато-ре.ечный механизм 25. Все механизмы ключа 5, захват 6, редуктор 26 и гидродвигатель 27, смонтированы в подвижном корпусе 28, который привертикальном пе1 а1«ещении уравновешивается, например, противовесами 29. Посредством вышеуказан« чх, устройств осуществляется удержание свечи на весу и ее свинчивание-развинчиван le. Управление работой каретки 4 и ключа 5 с захватом б и контроль выполняемых операций осуществляется при помощи датчиков 30-38, установленных как на каретке 4 и подвижном корпусе 28 ключа 5, так и на направляющих 3 вышки 1. Датчик 30 осуществляет контроль наличия замка свечи в клиновом захв j;e б,.датчик 31 контролирует положе ние клинового захвата б на оси сква жины или на оси захватных органов 2 свечеподающего устройства 16, датчик 32 служит для контроля раскрытия клинового :захвата 6, а датчик для контроля вертикального переметения клинового захвата 6 ключа 5. Команды для перег ода на предоста новочную скорость каретки 4 при дв жении вверх и вниз осуществляют дат чики 34 и 35; команды для остановки каретки 4 в крайних верхнем и нижнем положениях - датчики 36 и 37, а команду на закрытие захватного органа 20 свечеподакадего устройства 16 при получении свечи из захвата 6 ключа 5 - датчик 38. Каретка 7 с элеватором 8, связанная с барабаном 13, снабжена роликами 39, которые удерживают его в направляющих 3 вышки 1, Элеватор 8 сос тоит из самозаклиниваквдегося захвата 40 и гидравлически управляемых упоров 41, расположенных в подвижном корпусе 42, имеющем возможность как горизонтального, так и вертикальйЬго перемещения по направлякхцим 43 карет ки 7. При вертикальном леремещении подвижный корпус 42 уравновешен,, например, грузами 44, В направлении, перпендикулярном к -оси скважины, в сторону установки ведущей штанги (не показана) он перэлещаётся гидроцилиндрами 45 через зубчато-реечный механизм 46, а в бертикальном - гндроупорами 47. Причем управление гидроупорами 47 выполнено так, что корпус 42 может либо находиться 8 крайнем нижнем или в крайнем верхнем положениях относительно каретки 7, либо жестко фиксироваться относительно последней. В каретку 7 встроен маслонасос 48 с 13РИВОДОМ от ролика 49 через редуктор 50. На роликах 49 подвешена каретка 7 с помощью талевого троса, проходящего через кронблок 2. Маслоиа .сос 48 подает рабочую жидкость из маслобака 51 через клапанную коробку 52, фильтр 53 и обратный клапан 54 в пневмогидравлический аккумулятор 55, величина давления в котором контролируется манометрсм 56 и реле давления 57. Реверсивный золотний 58 с электрогндравлкческим управлением направляет рабочую жидкость при получении соответствующего электр гческого сигнала в полости {штоковую или бесштоковую) ги11роцилиндра 59, осуществляя закрытие .или раскрытие элеватора В, причем для блокировки при .закрытии штоконая полость гидроцилиндра 59 ставится на гидрозамок 60, а величина давления в ней контролируется реле 61 давления. Золотник 62 при соо±ветствующем электрическом сигнале управляет гидрозамком 63, Который соединяет полости под гидроупорами 47 с емкостью 64 или запирает последннмо, благодаря чему элеватор 8 либо перемещается относительно каретки 7, либо фиксируется гидрозамками 63 относительно него. Управление работой механизмов каретки 7 и контроль выполняемых ими операций осуществляется при помощи датчиков 65-76, установленных на каретке 7, на подвижном корпусе 42 и на направляющих 3 вшцки 1. Датчик 65 осуществляет контроль йаличия в элеваторе 8 ниппеля замкового соединения свечи при посадке его в резьбу спускаемой колонны, датчики 66 и 67 - контроль крайних (верхнего и нижнего) положений элеватора 8 относительно каретки 7, датчик 68- контроль раскрытия захвата 40 элеватора 8, датчик 69 - контроль наличия (отсутствия) перемещения элеватора 8 отно ительно каретки 7 и наоборот, датчик 70 контроль положения элеватора 8 в горизонтальном положении (либо на оси скважины, либо на оси шурфа под ведущую штангу). Ксяланды на остановку каретки 7 в крайних верхнем и нижнем положениях осуществляют датчики 71 н 72, ксманды для.перехода на предостановочную скорость при подъеме .и спуске каретки 7 - датчики 73 и 7-4, команду для включения щравляемых упоров 41 в режиме подъем колонны - датчик. 75, а команду на перемещение захвата 6 ключа 5 - датчик 76. Каретка 9 с элеватором 10 и докрепителем-раскрепителем 11 также оснащена направляющими роликами 77 и канатнили шкивами 78. В корпусе 79 каретки 9 установлен корпус 80 элеватора 10, в котором расположены механизм 81 удержания колонны на весу, механизм 82 докрепления-раскрепления замковых соединений и управляемые упоры 83, аналогичные механизму на каретке 7. Причем корпус 80 элеватора 10 с механизмами 81, 82 и 83 имеют возможность вертикального перемещения относительно каретки 9 ри псадощи гидроупоров 84 и уравноешен (например, грузами 85). Управление механизмами 81, 82 и 3 осуществляется автономньми блокаи (насосными и гидроавтскатики) , налогичньми подобшм на каретке 7 при помсмди соответствующих электрических сигналов, а К(нтроль вглполнеиия операций - при помадя датчиков, установленпьтх на каретке 9, на корпу се 80 элеватора и на направляющих 3 вьш.ки 1, Сама каретка 9, связанная с барабаном 14, управляется устройство автоматического включения, выключени И регулирования скорости вращения ба рабана. Датчики 86 и 87 осуществляют конт роль крайних (верхнего и нижнего) положений корпуса 80 элеватора 10 от носительно каретки 9, датчик 88 - контроль раскрытия, (закрытия) клинового захвата механизма 81 удержания колонны по весу, датчик 89 -- контрол наличия (отсутстпия) перемещения подвижного корпуса 80 относительно кдретки 9. Команды на остановку каретки 9 в крайних верхнем и нижнем положениях осутдествлпгот датчики 90 и 91 , команды для перехода на предостггковочную при движении каретки 9 вверх и вниз датчики 91 и 93, команду на срабатывание управляемых упоров 43 элеватора 7 - датчик 94, РаОота бурового автомата в релшме .Подъем бурильной колонны , Исход ное положение механизмов;1. Свечеподающее устройство 16 -захватный орган 20 одного из подаю щих поворотн:ых рычагов 17 находится на оси передачи свечи в крайнем верхнем положении, раскрыт, а зев его охватывслет с зазором свечу 2,. Каретка 4 на расстоянии 50 мм от крайнего верхнего положения Кли новой захват 6 ключа 5 находится на оси передачи свечи в захватный орга 20 свеч.еподакщего устройства 16 в своем крайнем нижнем положении отно сительно каретки 4 и закрыт, удерживая очередную свечу, 3,Каретка 7 на ргюстоужии б м от своего крайнего верхнего положвния„ Элеватор 8 закрыт, удерживая бурильную колонну на весу, и находится в крайнем нижнем положении относительно элеватора 7, 4,Каретка 9 находится в крайние нижнем положении. Подвижный корпус 80 элеватора 10, а следовательно,, механизм. .81 удержания колонны на ве су находятся в крайнем инзкнем положении относительно корпуса 79 карет ки 9, причем клияовой захват раскры а бурильная колонна пропущена сквоз последний,. По KcMaim& с пульта управления Подъем бурильной колонны каретк 7 вместе с бурильной колонной начин ет двигаться вверх, достигая нс8иянальной. скорости и воздействуй на .датчик 75, Ooi ома1ше последнего вьщвигаются управляемые упоры ватора 10, на которые воздействует торец ниппеля псщннмагаиейея вверк свечи. При BTof-i полости под гидроупорйми соединены емкостью 64. блока гидроавтоматики (см, фиг. 4), что позволяет подвид ному корпусу 80 элеватора 10:перемещаться вверх под действием свечи относительно корпуса 79. Срабатывает датчик .87, по команде которого Начинается подъем каретки 9 с элеватором 10 и докрепителем-раскрепителем 11, и эакрьшается клиновой захват механизма 81 удержания колонны навесу, По команде с пульта одновременно с движением каретки 7 начинает перемещаться вниз каретка 4 с очередной свечой в захватных органах ключа 5. Спуск каретки 4 с ключом 5 и его захватом 6 по команде от датчика 35 замедляется, а по команде от датчика 38 закрывается захватный орган 20 свечеподагацего устройства 16. При дальнейшем движении вниз каретки 4 ключ 5 с захватом 6 смещаются относительно последней и по команде датчика 33 клиновой захват б раскрывается. Одновременно подающий поворотный рычаг 17 свечеподающего устройства 16 начинает двигаться вниз в сторону в свечеприемники с очередной свечой, а на ось передачи свечи перемещаетсявторой подаюцшй рычаг 17, установивший в свечеприемники предыдущую свечу . В это время каретка 7 с элеватором 8 продолжает свое движение вверх с оптимальной скоростью, а каретка 9 с элеватором 10, связанная через свечу с кареткой 7 при помощи механизма 81 удержания колонны, разгоняется системой автоматического регулирования (САР) своим подъемником до оптимальной скорости, что фиксируется датчиком 89. По команде датчика 89 САР подъемншсом каретки 7 притормаживает последняя. При этом подвижйый корпус 80, приподнятый свечой относительно корпуса 79 каретки 9, фиксируется по команде датчика 89 относительно последней посредством перекрытия гидрозамками 63 гидромагистралей междуемкостью 64 и полостями под гидроупорами 84. Каретка 4 после передачи свечи в захватные органы 20 свечеподающего устройства 16 на предостановочной скорости продолжает идти вниз До датчика 37, я по ксманде последнего останавливается в своем крайнем положении, при этом эахват 6 ключа 5 перемещается на ось скважины и фиксируется. Каретка 7 после притормаживания начинает двигаться с меньшей скоростью, чем элеватор 8, который продолжает подниматься с оптил альной скоростью кареткой .9 благодаря их жесткой связи через свечу. Относительное перемещение каретки 7 элеватора 8 фиксируется датчиком 69 и по команде последнего самозаклини5вакнаий захват 40 элеватора 8 раскры вается. После этого каретка 7 с эле ватором 8 по сигналу датчика 68 начинает ускоренное .движение вниз навстречу каретке 9, а подвижный корпус 80 медленно опускается в крайне нижнее положение относительно карет ки 9 под действием собственного.ве са поднимаемой бурильной колонны, отключая датчик 87. Относительное перемещение подвижного корпуса 80 к каретки 9 становится возможным при открытии гидрозамков 63 по команде датчика 68, так как при этом емкость 64 соединяется с полостями под гидро упорами 84, на которых и вытесняется рабочая жидкость. Элеватор 8 с самозаклинивакадим захватом 40 после его раскрытия аналогичньв способом под собственным весом опускается в крайнее нижнее положение, отключая датчик 67, Механизм 82 докрепления-раскрепления замковых соединений, установле ный на каретке 9, осуществляет раскрепление очередного замкового соеди нения. Верхний свободный конец поднимаемой бурильной колонны входит в захват б ключа 5 и, упираясь в подпружиненный упор 95, приподнимает, подвижный корпус -28 ключа относитель но каретки 4, что фиксируется датчиком 33. По команде закрывается кли новый захват б, включается гидродвигатель 27 ключа 5 на отвинчивание и САР лебедочного подъемника каретки 4 на ее разгон до оптимальной cKopoc ти поднимаемой бурильной колонны. Каретки 4 и 9 начинают двигаться синхронно, а отвинчивание свечи за ее верхний конец ключом 5 продолжает ся. При 3Tcw каретка 7 с элеватором 8 по командам датчиков 74 и 72 притормаживаются и останавливаются в своем крайнем нижнем положении. Движущаяся каретка 9 с поднимаемой бури ной колонной встречается с „неподвижньми кареткой 7 и элеватором 8. При. этом энергия удара поглощается гидрав лическими буферами 96, а отнопитель ное смещение элеватора 8 и каретки 7 фиксируется датчиком 67, По команде последнего ос1пдествляется-закрытие самозаклиниваюадих захватов 40 и разгон каретки 7 с элеватором 8 врерх. О выходе каретки 7 на Иоминальную скорость поднимаемой бурильной колонны сигнализирует датчик 69 (при относительной скорости элеватора 8 и каретки 7 равной нулю). По команде этого датчика осуществляется фиксация элеватора 8 относительно каретки 7 при помощи гидрозамков 63 описанным способом и торможение каретки 9. Как только заканчивается отвинчивание свечи ключом 5, каретка 4 начинает быст-ю подниматься. При этом ключ 5 несет свечу в своих захватных органах 6. При выходе из элеватора 8 нижнего конца свечи срабатывает датчик 65 и по его комаиде осуществляется расфиксация и движение захвата 6 со свечой на ось захватных органов 20 свечеподакмего устройства 16. Торможение каретки 9 приводит к приподъему подвижного корпуса 80 относительно корпуса 79 под действием поднимаемой Элеватором 8 бурильной колонны. При этом срабатывает датчик 87, который дает ксманду на раскрытие клинового захвата механизма 81 удер.жания колонны на весу и расфиксацию элеватора 8 относительно каретки 7 описанным ранее способом. Элеватор 8 под действием в основном веса поднимаемой бурильной колонны медленно опускается в крайнее нижнее положение, отключив датчик 67. Каретка 9 по сигналу от датчика 88 начинает ускоренное движение вниз в исходное положение, а подвижный корпус 80 опускается з крайнее нижнее положение относительно корпуса. 79 (контролируется датчиком 87). По команде датчиков ..34 и 36 каретка 4 и ключ 5 со свечой притормаживаются и останавливаются в крайнем верхнем положении, а по команде датчика 31 захват 6 фиксируется на оси захватных оргаиов 20 свёчеподающего устройства 16 и разрешается спуск каретки 4. Работа автомата в режиме Спуск бурильной колонны происходит в обратной последовательности. Формула изобретения Автомат для спуско-подъемных операций в бурении, осуществляемых непрерывным cпocoбo f, содержащий подъемники с каретками на .направляющих, установленные на каретках подъемниов верхний и нижний элеваторы, дорепитель-раскрепитель резьбовых соеинений, ключ, свечеподающее устройтво со свечеприемником, датчики контроля, .отлича.ющийс я тем, что, с целью ускорения спускаподъема бурильной колонны, он имеет ополнительную каретку с ключом, разещенную на направляющих Btmie верхего э.певатора, причем ключ снабжен . идроцилиндром, установленные с возожностью горизонтального перемещеия относительно каретки. Источники информации, принятые о внимание при экспертизе: 1.Патент США 3002560, кл. 1667.5, 03.10.61. 2.Патент США Э194313, кл. 1667.5, 13.07.65.
2f .gis3S
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 1969 |
|
SU236377A1 |
| Буровая установка для бурения с плавучего средства | 1980 |
|
SU939715A1 |
| Устройство для перемещения свечей бурильных труб | 1980 |
|
SU933936A1 |
| Автоматический агрегат для ремонта скважин,мостки,автоматический ключ | 1980 |
|
SU1141180A1 |
| Устройство для спуско-подъема бурильных труб | 1981 |
|
SU977738A1 |
| БУРОВАЯ УСТАНОВКА | 1995 |
|
RU2100565C1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| Устройство для спуска и подъема бурильной колонны | 1981 |
|
SU1027376A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И РАЗМЕЩЕНИЯ СВЕЧЕЙ | 1967 |
|
SU215852A2 |
| Устройство для установки свечей бурильных труб в стационарных буровых вышках | 1984 |
|
SU1245683A1 |