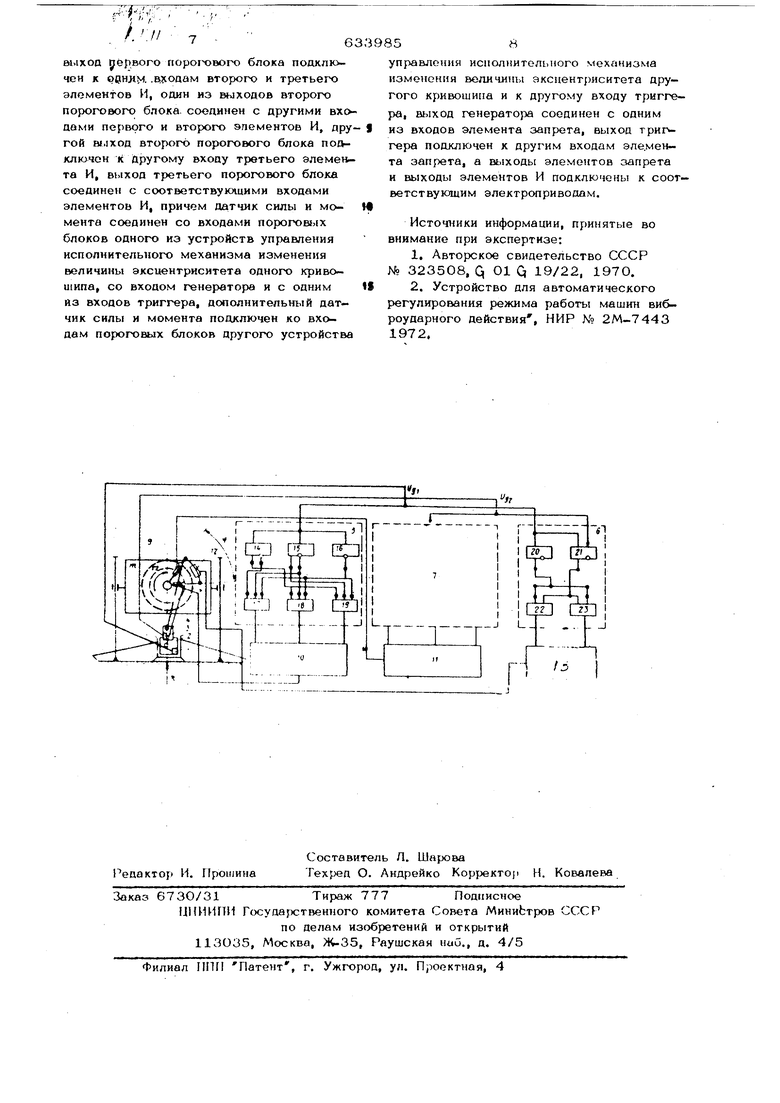
чающим генератор, триггер, и логические элементы запрета, и устройствами управ ления испо; нительнь Х механизмов измене ния величины эксцентриситетов кривошипов, каждое из которых включает логические элементы И и пороговые блоки один из выходов первого порогового блока соединен с одним из входов первого элемента И, другой выход первого порогового блока подключен к одним входам второго и третьего элементов И, один из выходов второго порогового блока сое динен с другими входами первого и второго элементов И, другой выход второго порогового блока подключен к другому входу, третьего элемента И, выход треть го порогового блока соединен с соответствующими входами элементов И, причем датчик силы и момента соединен со входами порогои 1Х блоков одного из устройств управления исполнительного механизма изменения величины эксцентриситета одного кривошипа, со входом генератора и с одним из входов триггера, дсшолнительный датчик силы и момента подключен ко входам пороговых блоков другого устройства управления исполнительного механизма изменения величины эксцентриситета другого кривошипа и к другому входу триггера, выход ген& ратора соединен с одним из входов элемента запрета, выход триггера подключе к другим входам элемента запрета, а выходы элементов запрета и выходы эле ментов И подключены к соответствукдцим электроприводам. Система для автоматического регулирования режима работы машин виброудар ного действия представлена на чертеже и содержит; датчик силы и момента 1, установленный на поршне-ударнике 2, до полнительный датчик силы и момента 3, установленный на поршне-ударнике 4, причем эти датчики поршней-ударников виброударной машины с регулируемым импульсом удара, выдающих в момент начала удара связанных с ними ударников на входы блоков, к которым они под ключены, импупьси кЦ амппитуаа к торых пропорциональна силе удара. Датчик 1 силы и начала удара поршня-ударника 2 подключен ко входу блока 5, управляоощего исполнительным механизмом изменения величины эксцентриси тета г j , кривошипа этого поршня, и ко входу блока 6, управляющего исполнител ным механизмом изменечия величины ф 854 смещения кривошипов (эксцентриков) обоих во удителей колебаний по фазе. Датчик 3 силы и момента начала удара поршня-ударника 4 подключен ко входу блока 7, управлшощего исполнительным механизмом изменения величины эксцентриситета Г 2 кривошипа этого поршня, и ко входу блока 6, Исполнительные механизмы изменения величины эксцентриситета соответствующих кривошипов вала возбудителей колебаний, которые конструктивно могут быть выполнены различно, состоят из непосредственно механизма 8, 9 позволяющего изменять в требуемом диапазоне эксцент риситет Vj ( Vgl соответствуклцего кривошипа (например, за счет перемещения штока при выполнении кривошипа в виде гидроцилиндра) и гидравлического, электромеханического и т.п. реверсивного привода 10, 11 этого механизма, управляемого соответствующим устройством управления 5, 7„ Исполнительный механизм изменения смещения кривошипов по фазе также содержит непосредственно механизм 12, позволякяций изменять в требуемом диапазоне значений смещение кривошипов по фазе tf , и его реверсивный привод 13, управляемый устройством управления 6. Устройства управления исполнительными механизмами изменения величины эксцентриситетов кривошипов 5 и 7 идентичны по схемной реализации: содержит по три порогокзтх блока с перестраиваемыми порогами срабатывания 14, 15 и 16 выполненные, например, в вице ждущих мультивибраторов, и логических элементов 17, 18 и 19. Один пороговый блок 17 имеет порог срабатывания TJ i / наименьший из трех порогов, второй пороговый Ил блок 15 имеет средний порог срабатывания, а третий пороговый блок 14 - порог срабатывания И , являкщийся наибольшим по величине, т.е. в каждой группе из трех пороговых блоков. Блок управления 6 включает в себя генератор эталонных по длительности сигналов 20, триггер 21 с раздельным запуском и логические элементы запрета 22 и 23, Устройство работает следующим образом. Сигналы11д. иНд2ОТ датчиков 1 и 3 ударов поршней, поступая на входы связанных с ними элементов, вызывают срабатывание тех пороговых блоков срабатывания которых ниже, чем амплитуды
импульсовИ 1 , 1 запуск генератора эталонных по длительности сигналов 20 и поочередное опрокидывание триггера 21,
В зависимости от вида запуска (т.е. от соотношения Т) 1 и порогов срабатываHJiflYi .Vp Vg на входах каждой из
логических элементов 17, 18 и 19 возникает та или иная кодовая группа управляющих сигналов. При соединениях пороговых блоков с логическими элементами на входах элементов 17, 18 и 19 возникают коды, приведенные в таблице.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического измерения фазового положения дебаланса | 1977 |
|
SU720289A1 |
| Способ автоматического управления работой машин ударно-вибрационного действия | 1980 |
|
SU1013572A1 |
| Способ рентгенорадиометрической сортировки и устройство для его осуществления | 1990 |
|
SU1810107A1 |
| Ограничитель вибраций газотурбинного двигателя | 1987 |
|
SU1537856A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОЧНОСТИ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1999 |
|
RU2170920C2 |
| Вентильный электродвигатель с токовым регулированием | 1989 |
|
SU1677807A2 |
| Устройство для останова основовязальной машины | 1982 |
|
SU1113442A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Способ обнаружения электропроводящих тел в потоке и устройство для его осуществления | 1979 |
|
SU900855A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2031509C1 |
Из таблицы следует, что для каждого вида запуска на входах только одного из трех логических элементов имеется код 111, необходимый для ее срабатывания. Поэтому в одно и то же время происходит управление машиной лишь по одному из выходов 17, 18 и 19. На выходе 17 формируется сигнал4ТГ.-, о необходимости уменьшения силы удара, включающий привод 10 исполнительного устройства для осуществления уменьшения Г , с выхо да 18 сигналТ1| о работе в заданном режиме и с выхода 19 - сигнал 1119 о необходимости увеличения силы удара, реализующий включение привода Ю на увеличение. Пороговые блоки и логические элемен ты в блоке управления 7, управление которых осуществляется сигналами от датчика 3, работают аналогичным образом. Одновременно с работой каналов регулирования силы ударов в системе вырабатываются сигналы изменения временного промежутка L между импульсами Од и (Jj. Для этого длительность L3Y импуль- calJjig на выходе генератора эталонных сигналов 20 устанавливается равной оптимальному для конкретных условий работы временному интервалу между ударными воздействиями первого и второго ударников. ИмпульсИ длительность которого рав на реальному (фактическому) временному промежутку t между импульсами 11 i и И. „на выходах 1 и 3, вырабатывается на выходе триггера 21, раздельный запуск которого осуществляется этими импульсами. Сигналы и 20 и Ч 21, с выходов генератора 2О и триггера 21 подаются на логические элементы запрета 22 и 23 таким образом, что нрн t сигнал U 22 .вь рабатывается на выходе только логического элемента 22, а npHig iT вырабатывается сигнал I и 2л J только на выходе логического элемента запрета 23,. При равенстве длительности эталонного и фактического временного интервала между импульсами удара (т.п. приЧ-э С сигналы на выходах элементов запрета 22 и 23 отсутствуют. Поступая соответ ственно на входы привода исполнительного механизма изменения угла сдвига по фазе между кривошипом, сигналы UQJ и 112звключают привод на изменение ф в направлении, обеспечиЕ1аюшем достижение ф . Формула изобретения Система для автоматического регулирования режима работы машин виброудар- ного действия, содержащая датчик силы и момента, исполнительные механизмы изменения величины эксцентриситетов кривошипов и величины смещения кривошипов по фазе с соответствующими электроприводами, отличающаяся тем, что с целью повышения надежности работы системы, она снабжена дополнительным датчиком силы и момента, устройством управления исполнительного механизма изменения величины смещения кривошипов по фазе, включающим генератор, триггер и логические элементы запрета, и устройствами управления исполнительных механизмов изменения величины эксцентриситетов кривошипов, каждое из которых включает логические элементы И и пороговые блоки, один из выходов первого порогового блока соединен с одним из входов первого элемента И, другой -f-:. . 7 6 выход рёрвого порогового блока подклк чен к рондн .блоаам второго и третьего элементов И, один из выходов второго порогового блока, соединен с другими вхо дами первого и второго эпементов И, дру гой В1.1ХОД второго порогового блока подключен к йругому входу третьего элемента И, выход третьего порогового блока соединен с соответствующими входами элементов И, причем датчик силы и мо- мента соединен со входами порогошлх блоков одного из устройств управления исполнительного механизма изменения величины эксцентриситета одного кривоишпа, со входом генератора и с одним из входов триггера, дополнительный датчик силы и момента подключен ко входам пороговых блоков другого устройства 5 управления исполнительного механизма изменения величины эксцентриситета другого кривошипа и к другому входу триггера, выход генератора соединен с одним из входов элемента запрета, выход триг гера подключен к другим входам элемента запрета, а выходы элементов запрета и выходы элементов И подключены к соответствующим электроприводам. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 323508, Q О1 Q 19/22, 1970. 2.Устройство для автоматического регулирования режима работы машин виброударного действия , НИР № 2М-7443 1972.
