00 СП
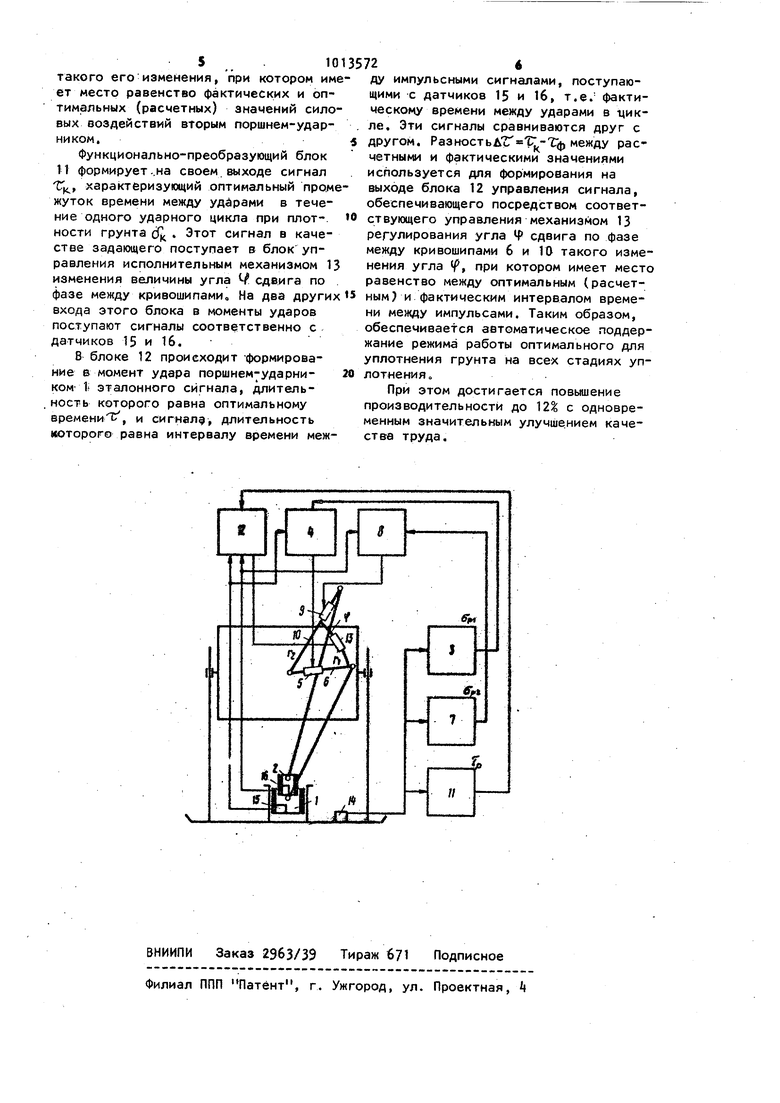
vj to Изобретение относится к автоматизации режимов работы машин ударно-ви рационного действия с двумя кривошипно-шатунными возбудителями колебаний, предназначенных для уплотнения грунтов и других материалов, забивки свай, формования изделий из бетонных смесей и т.п. Известен способ автоматического у равления режимом работы ударно-вибра ционных машин, включающий формировани импульсных сигналов в момент удара ударной части и в момент прохождения дебалансом оптимального положения и обеспечение совпадения обоих импульсов изменением скорости вращения дебалансов, жесткости пружины или величины начального зазора между уда ной частью и ограничителем ij. Недостатком этого способа является то, что он не может быть исполь зован для автоматического управления машин ударно-вибрационного .действия, работающих в режиме двух и более ударов ударной части об ограничител за один оборот рабочего вала, и вообще не может быть применим для регулирования величины и формы ударного импульса. Известен другой способ автоматического управления работой машин ударно-вибрационного действия, включающий измерение величин силовоговоздействия двух поршней, измерение длительности интервала времени между моментами ударов поршней и изменение радиусов кривошипов до достижения завенства между измеренными и заданными значениями величин силового воздействия и длительности интервала времени между моментами ударов 2. Недостатком этого способа является то, что при его реал| зации не удается обеспечивать н всех стадиях уплотнения наиболее оптимальные для уплотняемых грунтов и других матери алов режима работы вибротрамбовки с регулируемым импульсом удара, поскольку по самому существу способа предусмотрено поддержание равенства значений силовых воздействий с постоянными заранее заданными (расчетными) значениями силовых воздействий (путем соответствующего изменения величин эксцентриситетов кривошипов) и поддержание.заданного постоянного временногр интервала между ударными импульсами в каждом рабочем цикле или длительности силового воздействия (путем соответствующего изменения угла сдвига по фазе между кривошипами), т.е. в способе совершенно не учитывается существующая зависимость между оптимальными параметрами уплотнения и степенью уплотнения грунта под рабочим органом. Заданные значения силовых-воздействий и их длительности при известном . способе автоматического управления назначаются из условия с еспечения эффективной работы машины только в конечной стадии уплотнения, что не позволяет использовать полностью все потенциальные возможности рабочего органа. Цель изобретения - повышение :качества управления. Эта цель достигается тем, что согласно способу автоматического управления работой машин ударно-вибрационного действия, включающему измерение величин силового воздействия двух поршней, измерение длительности интервала времени между моментамиударов поршней и изменение радиусов кривошипов до достижения равенства между измеренными и заданными значениями величин силового воздействия и длительности У1нтервала. времени между моментами ударов, перед измерением величин силового воздействия строят тарировочные зависимости между оптимальными величинами силового воздействия двух поршней и плотностью грунта под рабочим органом и тарировочную зависимость между оптимальной длительностью интервала времени между моментами ударов поршней и плотностью грунта под рабочим органом, после чегоизмеряют плотность грунта под рабочим органом, а в качестве заданных значений величин силового воздействия и длительности интервала времени между моментами ударов используют их оптимальные значения, рассчитываемые по тарировочным зависимостям. На чертеже представлена функциональная схема устройства, реализующего способ. Предварительно определяются по экспериментальным данным тарировочные зависимости между оптимальными силовыми воздействиями 6р поршнемуда(ником 1 первого ударного механизма с эксцентриситетом кривошипа г, (Og-f) поршнем-ударником 2 второ31
го ударного механизма с эксцентриси.(бр)
а также оптима11ьиым
тетом г,
интервалом времени Сп между этими си/Ювыми воздействиями, и плотность грунта.
Зависимость ( (cf) закладывается в основу работы функциональнопреобразующего блока 3 задачей.которого является формирование на выходе сигнала бм , соответствующего оптимальной (расчетной) величине силового воздействиям первым поршнемударником (оптимального величине контактного давления) при имеющей в момент измерения плотности грунта - Фактически блок 3 является задатчиком для блока 4 управления испо/жительным механизмом 5 изменения величины эксцентриситета r/j кривошипа 6. Зависимость Ghp ef(сГ) закладывартся в основу работы функционально-преобразующего блока 7 задачей которого является формирование на выходе сигнала Gp, , соответствующего оптимальной величине силового воздействия вторым поршнем-ударником (оптимальной величине контактного да ления) при имеющей место в момент измерения плотности грунта tf . Фактически блок 7 является задатчиком для блока 8 управления исполнительным механизмом 9 изменения величины эксцентриситета r,j кривошипа 10.
Зависимость Тр -fi (dl закладывается в основу работы функционального преобразователя 11, задачей которого является формирование на выходе сигнала Tpi, соответствующего оптимальному интервалу времени между силдвыми воздействиями поршнямиударниками 1 и 2. Фактически блок 11 используется в качестве задатчика оптимального (эталонного) интервала времени между ударными воздействиями в цикле для блока 12 управления исполнительным механизмом 13 изменения величины угла Ч сдвига по фазе между кривошипами. В системе управления используется также датчик 14 для плотности грунта под рабочим органом, связанный с входами функционально-преобразующих блоков 3, 7.-И 11, датчик 15 силы и момента удара поршнем-ударником 1, связанный с измерительными входами блоков 4 и 12 управления и датчик 16 силы и момента удара поршнем-ударником 2, связанный с измерительным входом блока 8 управления
24
и вторым измерительным входом блока 12 управления. Выходы функционально-преобразующих блоков 3 7 и 11 соединены с задающими (установочными) входами соответственно блоков 4, 8 и 12.
Способ реализуется следующим об- . разом,
С помощью датчика 14 измеряется текущее значение плотности грунта cf. под рабочим органом. Датчик 14 формирует соответствующий сигнал, который подается на входы функционально-преобразующих блоков 3i 7 и 11, При этом блок 3 формирует на своем выходе сигнал (Jkifc., соответствующий оптимальной величине силового воздействия поршнем-ударником 1 при такой(С) плотности грунта, который подается в качестве заданного на блок 4 управления, в котором сравнивается с величиной сигнала , формируемого датчиком 15 силы и момента удара поршнем-ударником 1, который характеризует фактическое силовое воздействие, оказываемое этим поршнем на ограничитель рабочую, плиту.. Разность между расчетным и фактичес им значениями силовых воздействий используется для формирования на выходе блока 4 управления сигнала, обеспечивающего посредством соответствующего управления механизмом 5 регулирования величины эксцентриситета г. кривошипа 6 такого его v изменения, при котором имеет место равенстг-io значений фактических и расчетных (оптимальных силовых воздействий первым поршнем-ударником. Аналогично в блоке 8 управления сравниваются соступающийС функционально-преобразующего Олока 7 сигнал ku характеризующий оптимальное значение силового воздействия поршнемударником 2 при плотности грунта бц, с сигналом, характеризующим фактическое значение силового воздействия (, информация о котором поступает с датчика силы и момента удара в момент удара поршня-ударника о рабочую плиту. Разность между расчетным и фактическим значениями силовых воздействий Ьб ,, используется для формирования на выходе блока 8
управления сигнала, обеспечивающего посредством соответствующего управления механизмом 9 регулирования величины эксцентриситета г кривошипа 10
такого егоизменения, при котором имеет место равенство фактических и оптимальных (расчетных) значений силовых воздействий вторым поршнем-ударником.5
Функционально-преобразующий блок II формирует ..на своем выходе сигнал Tj, характеризующий оптимальный промежуток времени между удйрами в течение одного ударного цикла при плот-. «О ности грунта cfj . Этот сигнал в качестве задающего поступает в блок управления исполнительным механизмом 13 изменения величины угла М сдвига по фазе между кривошипами. На два других5 входа этого блока в моменты ударов поступают сигналы соответственно с датчиков 15 и 16.
В блоке 12 происходит формирование в момент удара поршнем7Ударни- 20 КОМ 1( эталонного сигнала, длительность которого равна оптимальному времениЛ, и сигналу, длительность «оторого равна интервалу времени между импульсными сигналами, поступающими с датчиков 15 и 16, т.е. фактическому времени между ударами в -цикле. Эти сигналы сравниваются друг с другом. РазноствАТ Т -Тф между расчетными и фактическими значениями используется для формирования на выходе блока 12 управления сигнала, обеспечивающего посредством соответствующего управления механизмом 13 регулирования угла ф сдвига по фазе между кривошипами 6 и 10 такого изменения угла , при котором имеет место равенство между оптимальным (расчетным) и фактическим интервалом времени между импульсами. Таким образом, oбecпeчивaetcя автоматическое поддержание режима работы оптимального для уплотнения грунта на всех стадиях уплотнения.
При этом достигается повышение производительности до 12 с одновременным значительным улучшением качества труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматического регулирования режима работы машин виброударного действия | 1976 |
|
SU633985A1 |
| Вибротрамбовка | 1983 |
|
SU1271921A1 |
| Устройство для автоматического измерения фазового положения дебаланса | 1977 |
|
SU720289A1 |
| Вибромолот для погружения свай,шпуНТА и ТОМу пОдОбНыХ элЕМЕНТОВ | 1978 |
|
SU808598A2 |
| Способ автоматического управления режимом работы виброплощадок со свободным прижатием формы для формования изделий | 1978 |
|
SU774942A1 |
| Способ автоматического управления режимом работы виброплощадок со свободным прижатием формы для формования изделий | 1978 |
|
SU876425A2 |
| Вибротрамбовка | 1980 |
|
SU878855A1 |
| Вибротрамбовка | 1982 |
|
SU1020479A1 |
| Устройство для автоматического регулирования режима работы машины виброударного действия | 1976 |
|
SU551427A1 |
| Устройство для автоматического управления режима работы вибрационных формующих площадок | 1978 |
|
SU779094A1 |
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ МАШИН УДАРНО-ВИБРАЦИОННОГО ДЕЙСТВИЯ, включающий измерение велиМин силового воздействия двух поршней, измерение д чительности интервала времени между моментами ударов .поршней и изменение радиусов кривошипов до достижения равенства между измеренными и заданными значениями величин силового воздействия и длительности интервала времени между моментами ударов, отличающийся тем, что, с целью повышения качества управления, перед измерением величин силового воздействия строят тарировочные зависимости между оптимальными величинами силового воздействия двух поршней и плотностью грунта под рабочим органом и тарированную зависимость между оптимальной длительностью интервала времени между моментами ударов поршней и плотностью грунта под рабочим органом, после чего измеряют плотность грунта под рабочим органом, а в качестве заданных значений величин силового (Л воздействия и длительности интервала времёни между моментами ударов используют их оптимальные значения, рассчитываемые по тарировочным зависимостям. „
