При рытье канав для осушительных и ирригационных целей, а также канав под трубопроводы для водоснабжения и канализации требуется планировка дна канавы под заданным углом к горизонту.
Методы получения проектного профиля дна канавы связаны с необходимостью проведения большого количества геодезических и дополнительных поправочных земляных работ, совершаемых по мере прохождения трассы канавы. Это обстоятельство ведёт к дотюлнительной потере времени и удорожанию работ по рытью канав и тем самым в значительной степени снижает эффективность применяел;ых для этой цели механизмов и .ашип.
Для облегчения и ускорения проведения профилировочных работ были предложены устройства,-автоматически обеспечиваюш,ие при работе машины планировку дна канавы под заданным углом к горизонту. Эти устройства заключают в себе два фотоэлемента, устанавливаемые на машине для регулирования глубины загружения рабочего
органа посредством двух реле и исполнительного механизма и находящиеся под воздействием на них светового луча, посылаемого к машине от установленного на поле источника света и наклонённого к горизонту под углом проектного наклона дна канавы.
Известные до сих пор устройства такого рода обладают тем недостатком, что при резких колебаниях машины по высоте или по углу её наклона к горизонту, в зависимости от рельефа пути, фотоэлементы выходят из сферы действия светового луча, и автоматическое управление глубиной загрузки рабочего органа нарушается. Это происходит от того, что при выходе из сферы воздействия луча обоих фотоэлементов срабатывают оба реле, в результате чего исполнительный механизм сохраняет нейтральное положение.
Согласно изобретению, в цепи обоих реле включены дополнительные контакты, автоматически размьн аюш,ие цень одного реле при срабатывании второго. Этим исключается возможность нейтралького положения исполнительного механизма при выходе фотоэлементов из сферы воздействия на них светового луча, и механизм срабатывает в ту или другую сторону в зависимости от направления отклопения фотоэлементов от линии луча по вертикали.
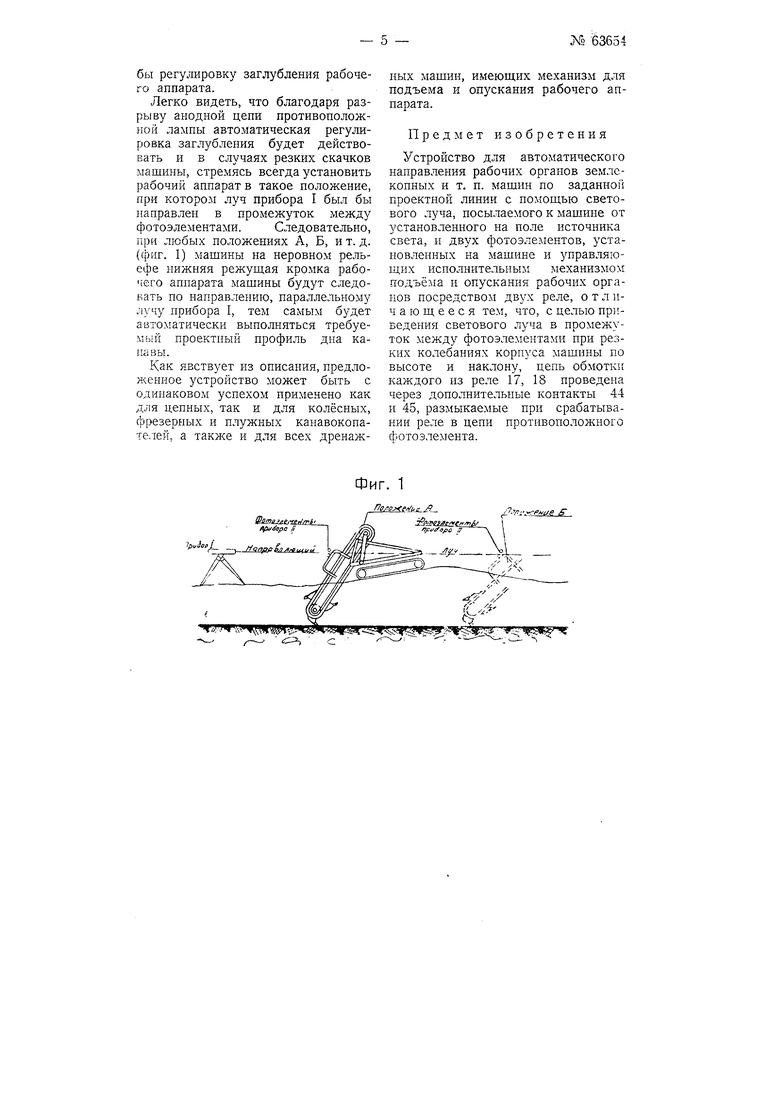
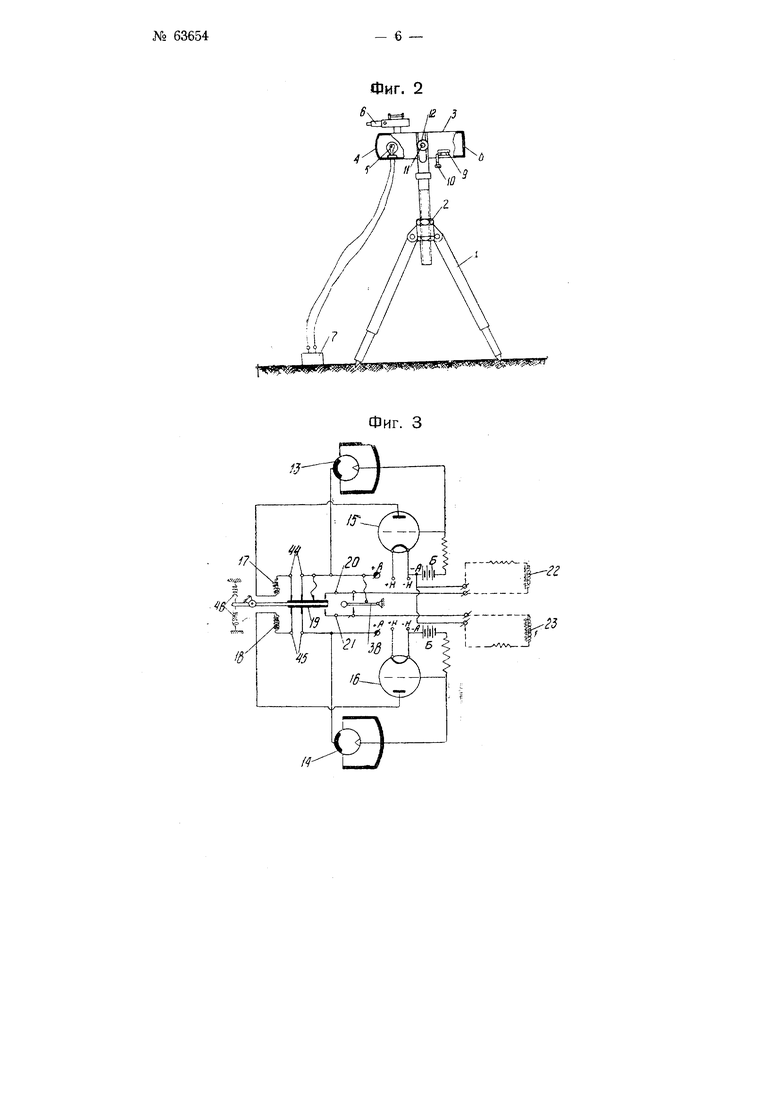
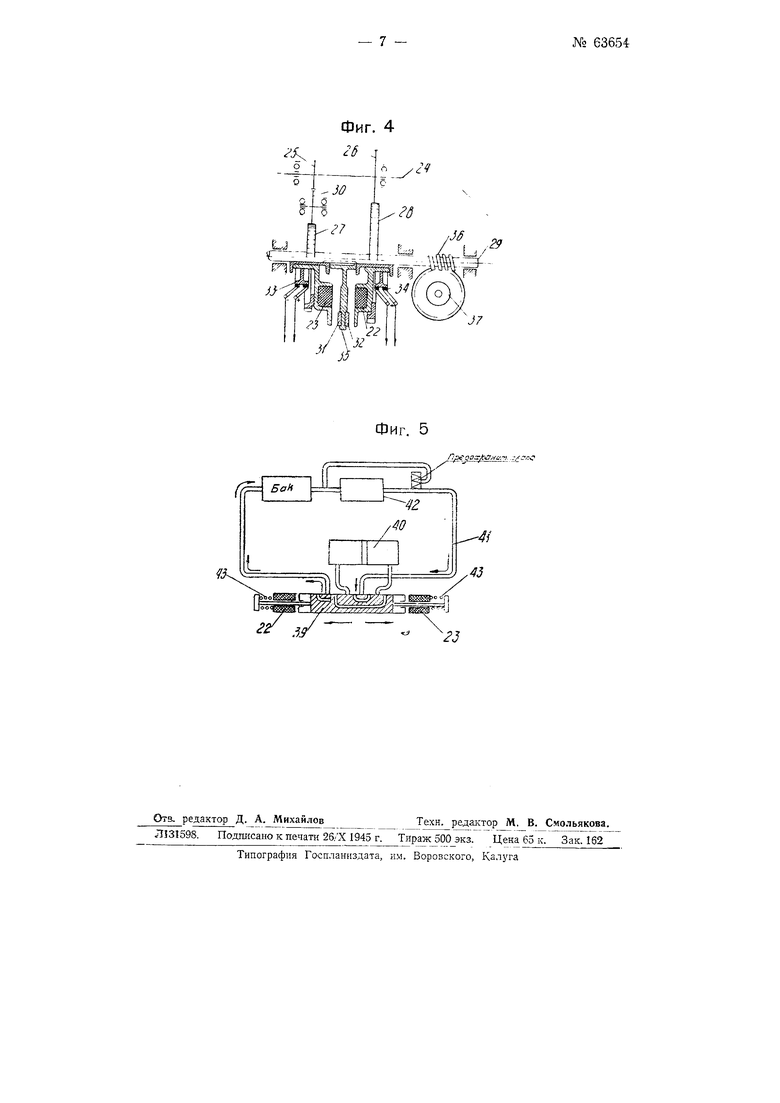
На чертеже фиг. 1 изображает общую схему работы машины с предлагаемым устройством; фиг.,2- устройство указателя линии проектного профиля; фиг. 3 - принципиальную электрическую схему устройства; фиг. 4 и 5 - примерные схемы механизмов заглубления рабочего аппарата.
Как показано на фиг. 1, предлагаемое устройство состоит пз двух приборов: прибора I, устанавливаемого впе магиипы и являюгцегося указателем направления проектного профиля дна канавы, и прибора II, иомепиющегося на самой машине.
Прибор II выполпяет одповременпо две фупкпии; 1) регистрирует отклонение режущей кромки рабочего аппарата от проектной отметки Б данной точке и 2) регулирует заглуб; епие рабочего аппарата до требуемой величины.
Прибор I является по существу генератором узкого пучка инфракрасных лучей, направляемых под 1ребуемым углом к горизонту.
Как известно, инфракрасные лучи обладают большой проницаемостью по отношению к водяным парам, благодаря чему они применяются в технике как надёжное средство связи, обеспечивающее действие её па расстояние до 40-50 км в . погоду (оптический телеграф и телефон). В случае же копания канав удаление машин от прибора I пе будет превышать 1-2 км и, следовательно, надёжность применения прибора I в качестве указателя линии проектного профиля будет полностью гарантирована.
Прибор I (фиг. 2) состоит в основном из щтатива 1, снабжённого винтовым устройством 2, служащим для подъёма или опускания головки 3, в тыльной части которой находятся параболическое зеркало 4 и зрительная труба 6, наглухо
соединённая с этой головкой. В фокусе зеркала 4 помещается источник света 5 (лампочка накаливания).
В качестве излучателя инфракрасных лучей применена лампочка накаливания 5, питающаяся от аккумулятора 7. Для получения от прибора избирательного излучения в инфракрасной области в передне части ,в окно 8 может быть вставлен специальный фильтр. В качестве такого фильтра могут быть применены топкие ластинки из эбонита, )1 и дру1их материалов, приме яемых в технике для указанпо . Оптически оси зрительно трубы 6 и параболического зеркала 4 параллельп 1.
Сбоку головки 3 прикреплё цилиндрический уровень 9, спабжёпiibiii спецналь лм поворотным л-cTpoiicTBOM 10, по которому производится установка оптической осп параболического зеркала 4 под уг.том к горизонту. Головка 3 прибора может поворачиваться в вертикальной п.тоскости относительно оси 11 и закрепляется в определёпном положении зажимным виптом 12.
Прибор П, находящийся па машипс, состоит из двух частей: регистрирующей отклонение по высоте рел-сущей кромки рабочего аппарата от проектного профиля и регулирующей заглубление рабочего аппарата.
Регистрация отклонения режущей
кромки от проектного профиля ВЬ полняется двумя фотоэлементами 13 и 14 (фиг. 1 и 3), закреплёнными на рабочем органе машины с его наружной стороны, обращённой к прибору I. Оба фотоэлемента расположены в вертикальной плоскости один над другим с небольшим промежутком между ними.
Узкий пучок инфракрасных лучей прибора I направляется в сторону рабочего хода машины в промежуток между фотоэлементами и под заданным углом к горизонту. При такой установке нрибора I направление луча его будет параллельно проектной. линии профиля дна канавы. Для получепия избирательной чувствительности фотоэлементов 13 и 14 к излучению прибора I они выбираются с максимумом спектральной чувствительности в инфракрасной области. Подбор таких фотоэлементов не представляет трудности, так как подавляющее большинство фотоэлементов обладает этим свойством. Каждый фотоэлемент 13 и 14 имеет, как показано на электрической схеме соединений (фиг. 3), свой усилитель фототоков.
Фотоэлементы вклЕОчены в схеме таким образом, что величина фототока, возникающего в них от излучения прибора I в их среднем положении относительно этого луча, достаточна для того, чтобы запереть усилительные лампы 15 и 16. В этом случае ток в их анодных цепях будет отсутствовать. Этого легко достигнуть подбором соответствующего смещения в цепи сеток усилительных ламн 15 и 16.
При движении машины вдоль трасы канавы корпус её, а вместе с ним и рабочий орган, будет ввиду )есоответствия рельефа поля проектному профилю канавы отклоняться от чуча прибора I в ту нлп другую сторону в вертикальной плоскости. При этом закреплённые на рабочем органе фотоэлементы будут выходить из равновесного относительно этого луча положения. В начальный момент выхода из равновесного положения излучение, падающее от прибора I на един из фотоэлементов, уменьшится, а на другой - увеличится. В соответствии с вышеописанным способом включения фотоэлементов па сетке усилительной лампы фотоэлемента, получившего уменьшенный световой поток, возникнет положительный потенциал, и в анодной цепи этой лампы появится ток в то время как усилительная лампа другого фотоэлемента останется запертой.
В анодную цепь каждой усилительной лампы 15 и ,16 включены катушки 17 и 18 электромагнитного реле. При прохождении в анодной цепи какой-либо из ламп тока электромагниты 17 или 18 притянут в
соответствующую сторону якорь 19 электромагнитного реле. При этом будет замыкаться та или иная пара контактов 20 или 21, в зависимости от того, какой из фотоэлементов (верхний или нижний) лишился нормального расчётного об.т1учения.
При замыкании контактов 20 или 21 включаются соответствующие цепи, питающие током от источника напряжения электромагнитные катушки 22 или 23 управления механизмом подъёма и опускания рабочего органа, которые включены в схему (фиг. 4 и 5) таким образом, что при начальном ослаблении величины светового потока, падающего на нижний или верхний фотоэлементы, механизм заглубления будет соответственно включаться на подъём или опускание рабочего органа. Как видно из схемы соединений (фиг. 3), это движение рабочего органа будет продолжаться до тех пор, пока луч прибора I снова не займёт среднее положение между фотоэлементами.
В этом положении, согласно вышесказанному, обе усилительные лампы 15 и 16 будут заперты и якорь 19 электромагнитного реле, приняв нейтральное положение под действием пружин 46, разорвёт цени питания электромагнитных катушек 22, 23 управления механизмом заглубления рабочего органа, и движение последнего прекратится.
Примерная кинематическая схема реверсивного механизма для подъёма или опускания рабочего органа при механическом приводе, показанная на фиг. 4, заключает в себе ва.1 24, получаюший вращение от двигателя через промежуточные передачи и жёстко связанны) с зубчатыми колёсами 25 и 26. От этих колёс вращение передаётся зубчатыл колёсам 27 и 28, свободпо вращающимся на валу 29. Зубчатые колёса 27 и 28 вращаются в противоположные стороны, что достигается введением в схему паразитного колеса 30. На этом же валу 29 между зубчатыми колёсами жёстко сидит диск 35, снабжённый по периферии с обеих сторон фрикционными обкладками 31 и 32. В корпусах зубчатых колёс расположены электромагнитные катушки 22 и 23, ток в которые поступает через контактные кольца 33 и 34, вращающиеся вместе с зубчатыми колёсами. При поступлении тока от реле соответствующего фотоэлемента в ту или иную из электромагнитлых катушек 22, 23 диск 35 пере,1естится в осевом направлении к одному из зубчатых колёс 27, 28 и прижмётся к нему своей фрикционной обкладкой 31 или 32, получив таким образом вращение в соответствующую сторону, которое через вал 29 и червячную передачу 36 передаётся барабану 37, на который навивается трос рабочего органа (плуг, ковшевая рама, винтовая фреза и т. д.).
При прекращении подачи тока в катушки э.чектромагпитов, диск действием пружин (не показанных i;a чертеже) отключается и движе не рабочего органа нрекращается ввиду самотормозящего действия червячной передачи. Само собой разумеется, что изменение направления вращения вала 29, а следовательно и барабана 37, может быть достигнуто не только ноказанны.д 1 схеме фнг. 4 способом, но и прил енением реверсивного механизма, состоящего из трёх конических шестерён а также любым другим способом, известным и применяемым в технике для указанной цели.
При гидравлическом приводе (фиг. 5) срабатывание реле от соответствующего фотоэлемента замыкает цепь той или иной из электромагнитных катушек 22, 23, вследствие чего распределитель 39 передвинется в одно из крайних ноложени 1 и направит жидкость в соответствующую полость рабочего цилиндра 40, причём, в зависимости от направления перемещения распределителя, рабочий орган будет подниматься или опускаться.
Как и в предыдущем случае электромагнитные катущки 22, 23 включены в схему так, что ослабление Е еличины светового потока на верхнем или нижнем фотоэлементе вызывает соответственно подъем или опускание рабочего органа, В среднем, нейтральном, положении распределитель разобщает обе полости цилиндра от трубопровода 41 и насоса 42. Вследствие несжимаемости жидкость удерживает в это время порщень в определённом ноложеник н фиксирует положение рабочего органа. Возврат раснределителя в Heiiтральное положение при отсутствии тока в электромагнитах 22, 23 обеспечивается пружинами 43.
Во всех случаях, когде фотоэлементы прибора II имеют одинакову о освещённость или же не освещен; вовсе, якорь 19 электромагнитного реле под действием нружнн 46 принимает нейтральное положение г.. вследствие выключения им цене it питания электромагнитных катущсь: 22, 23 управления механизмом заг.чубления, движение рабочего органа нрекращается.
Для того чтобы в случае необходимости можно было поднять или опустить рабочий орган, независимо от действия автоматического регулятора заглубления, предусмотрсг в схеме (фиг. 3) переключатель 38, включение которого производится с люста управления мехапизмами машины.
Чтобы обеспечить правильное функционирование автомата при наличии резких колебаний корпуса машины, могущих возпикнуть npi: особо неровном рельефе поля н:п1 от других каких-либо причин, в схеме включения фотоэлементов (фиг. 3) предусмотрены донолнительные контакты 44, 45 электр; магнитного реле, благодаря которым при срабатывании реле от уснлите;1я одной лампы анодная цень другся; лампы разрывается.
Если бы не было предусмотрен.-:блокирующее устройство, то резком выходе в вертикальной плоскости обоих фотоэлементов из полк луча прибора I в анодных цепях обеих ламп возник бы ток, в результате чего якорь 19 электромагнитного реле занял бы нейтральное ноложение и, разо-рвав контакты 20, 21 ценей электромагнитных катушек 22, 23 управления реверсом, прекратил
бы регулировку заглубления рабочего аппарата.
Легко видеть, что благодаря разрыву анодной цепи противоположной лампы автоматическая регулировка заглубления будет действовать и в случаях резких скачков машины, стремясь всегда установить рабочий аппарат в такое положение, при котором луч прибора I был бы направлен в промежуток между фотоэлементами. Следовательно, при любых положениях А, Б, и т. д. (фиг. 1) машины на неровном рельефе нижняя режущая кромка рабочего аппарата машины будут следовать по направлению, параллельному лучу прибора I, тем самым будет автоматически выполняться требуемый проектный профиль дна капавы.
Как явствует из описания, предложенное устройство может быть с одинаковом успехом применено как для цепных, так и для колёсных, фрезерных и плужных канавокопателей, а также и для всех дренажных машин, имеюш,их механизм для подъема и опускания рабочего аппарата.
Предмет изобретения
Устройство для автоматического направления рабочих органов землекопных и т. п. машин по заданной проектной линии с помощью светового луча, посылаемого к машине от установленного на поле источника света, и двух фотоэлементов, установленных на машине и управляющих исполнительным механизмом подъёма и опускания рабочих органов посредством двух реле, о т л ичающееся тем, что, с целью приведения светового луча в промежуток между фотоэлементами при резких колебаниях корпуса машины по высоте и наклону, цепь обмотки каждого из реле 17, 18 проведена через дополнительные контакты 44 и 45, размыкаемые при срабатывании реле в цепи противоположного фотоэлемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для измерения площади непрозрачных плоских гибких материалов (кож, мехов, тканей и т.п.) | 1939 |
|
SU61502A1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО К ПРЕССАМ С ВРАЩАЮЩИМСЯ СТОЛОМ | 1950 |
|
SU90536A1 |
| УСТРОЙСТВО ДЛЯ ОТПРАВЛЕНИЯ И ПРИЕМА ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1924 |
|
SU3880A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ТРАФЛЕНИЯ РИСУНКА НА ПЕЧАТНЫХ МАШИНАХ | 1949 |
|
SU86571A1 |
| Устройство для автоматического управления ловителем вагонеток наклонных подъемников | 1940 |
|
SU61686A1 |
| Устройство для автоматического регулирования питания водой судового котла | 1957 |
|
SU115293A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ОПТИЧЕСКИХ СВОЙСТВ ТЕЛ | 1933 |
|
SU38347A1 |
| Фотоэлектрический туманограф | 1944 |
|
SU65191A1 |
| Предохранительное устройство для катодных ламп | 1929 |
|
SU17447A1 |
| Устройство для измерения температуры раскаленных тел | 1933 |
|
SU42330A1 |
о„А
Фиг. 2
Фиг. 3
Фиг. 4
J
/.7
о
Фиг. 5
npeQO f fJ - -
