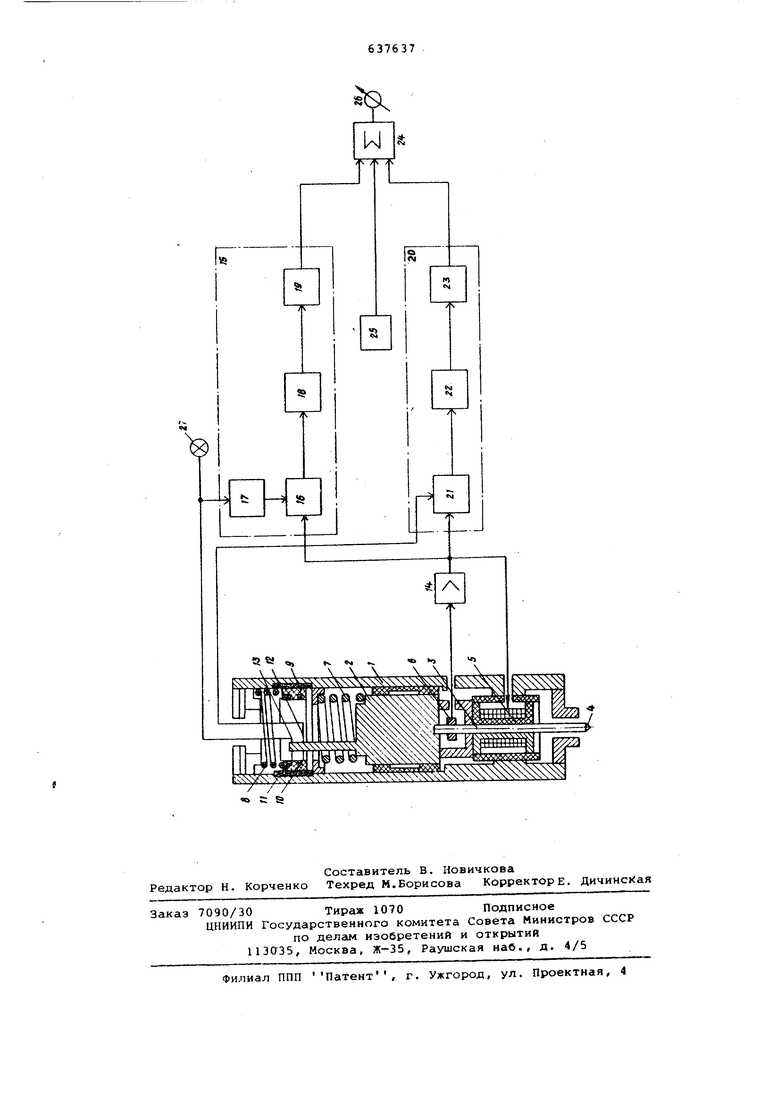
(54) ПБРВНОСНОЯ ТВЕРДОМЕР В корпусе 1 щупа прибора размеазем индентор, жестко связанная с инертной массой 2 и состоящий из чунствитель ного стержня 3 и алмазного наконе ника 4. Кроме того, в корпусе установлены катуипса 5 возбуждения, пьёзоэлемент 6, пружины 7 и 8, стаоилнзатор усилия вдавливания, выполненный в виде втулки 9, снабженной неподвижной парой контактов 10 и 11, н дна подвижных контакта 12 и 13, связанных с инертной массой 2. Электронная схема прибора состоят из усилителя 14; блока частотомера 15, включающего клапан 16, аибратор 17, счетчик 18 импульсов, преобразователь 19 частоты; устройства 20 динамической коррекции усилия вдавлива ния, включагацего клапан 21, счетчик 22 импульсов, преобразователь 23 частоты; суг ялатора 24 напряжения; блока 25 задания модуля упругости индикатора 26; сигнализатора 27 в виде сигнальной лампыо Переносной твердомер работает сле дукяцим образом. По шкале блока 25 устанавливают значение модуля упругости контролируемого материала. Щуп устанавливают на контролируемую конструкцию и прижимают к ней до загорания сигнализатора 27. При этом под действием приложенной силы алмазный наконечник 4 внедряется в контролируемое изделие. Пружина 7 сжимается, а индентор инертная масса 2 и подвижные контакты 12 и 13 перемещаются относительно втулки 9. Стержень 3, пьезоэлемент 6 усилитель 14 и катушка 5 образуют ко лебательный контур, в котором возник ют электрические колебания; частота последних определяется глубиной проникновения алмазного наконечника 4 в контролируемую конструкцию. В момент замыкания подвижного кон такта 12 с неподвижным контактом 10 открывается клапан 21 и на счетчик 22 поступают импульсы в течение времени замыкания. При прижатии щупа к контролируемой конструкции происходи дальнейшее внедрение алмазного наконечника 4 и перемещение индентора, инертной массы 2 и подвижных контактов 12 и 13 относительно втулки 9. Частота колебаний чувствительного стержня 3 при этом увеличивается. 0 момент замыкания подвижного контакта 13с неподвижным контактом 11 при но минальном усилии вдавливания, равном , весу инертной массы 2 и усилию пружи ны 7, измеряют частоту колебаний чув ствительного стержня 3 путем подсчет .числа импульсов, прошедших через кла пан 16 на счетчик 18. Одновременно загорается сигнализатор 27. Счетчики 18 и 22 запоминают поданное на них число импульсов. При возвращении щупа в исходное положение преобразователь .19, связанный со счетчиком 18, продолжает выдавать на сумматор 24 напряжение, соответствующее модулю упругости, коэффициенту Пуассона контролируемого материала и глубине проникновения в него алмазного наконечника 4. На второй вход сумматора 24 выдается напряжение, соответствующее скорости прижатия щупа к контролируемой конструкции, т.е. значение динамической коррекции усилия вдавливания. На третий вход сумматора 24 от блока 25 поступает заданное напряжение, соответствукяцее модулю упругости и коэффициенту Пуассона контролируемого материала. В сумматоре 24 из напряжения, выдаваемого преобразователем 19, происходит выделение той частив сигнала, которая соответствует глубине проникновения алмазного наконечника 4 в контролируемый материал при номинальном усилии вдавливания с учетом его динамической коррекции, и передача результата на стрелочный индикатор 26, по шкале которого контролер определяет твердость контролируемого материала. Формула изобретения Переносной твердомер, содержащий щуп, выполненный в виде корпуса, размещенных в нем стабилизатора усилия вдавливания, инертной массы, пружины, индентора, жестко связанного с инертной массой и состоящего из чувствительного- стержня и наконечника, катушки возбуждения, пьезоэлемента,и электронную схему,включающую усилитель, вход которого соединен с пьезоэлементом, а выход - с катушкой возбуждения,преобразователь частоты,блок задания модуля упругости контролируемого материала и индикатор,о тличающийс я тем,что,с целью обеспечения автоматизации испытания и повышения точности, он снабжен двумя подвижными контактами, связанными с инертной массой, сигнализатором, соединенным с одним из подвижных контактов, устройством динамической коррекции усилия вдавлиаания, содержащим клапан и счетчик импульсов, связанные через преобразователь частоты, один вход клапана связан с усилителем, другой - со вторым подвижным контактом, а стабилизатор усилия вдавливания выполнен в виде втулки, подпружиненной в осевом направлении и снабженной неподвижной парой контактов. Источники информации, принятые во внимание при экспертизе: 1.Савкин С. В. Неразрушающие методы контроля металлов на электростанциях. М., Машгиз, 1974, с. 22. 2.Авторское свидетельство СССР :№ 297900, кл, GOi N 3/48, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для определения прочностных характеристик металлов | 1981 |
|
SU1068767A1 |
| Переносной электронный твердомер | 1980 |
|
SU1040382A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047157C1 |
| ПЕРЕНОСНЫЙ ЭЛЕКТРОННЫЙ ТВЕРДОМЕР | 1971 |
|
SU297900A1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗЦА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2044298C1 |
| Электроакустический твердомер | 1979 |
|
SU847156A1 |
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ТВЕРДОМЕР | 1992 |
|
RU2042942C1 |
| ТВЕРДОМЕР | 1992 |
|
RU2045024C1 |
| Преобразователь для контроля твердости электроакустическим методом | 1980 |
|
SU932368A1 |
| Электроакустический твердомер | 1985 |
|
SU1242751A1 |