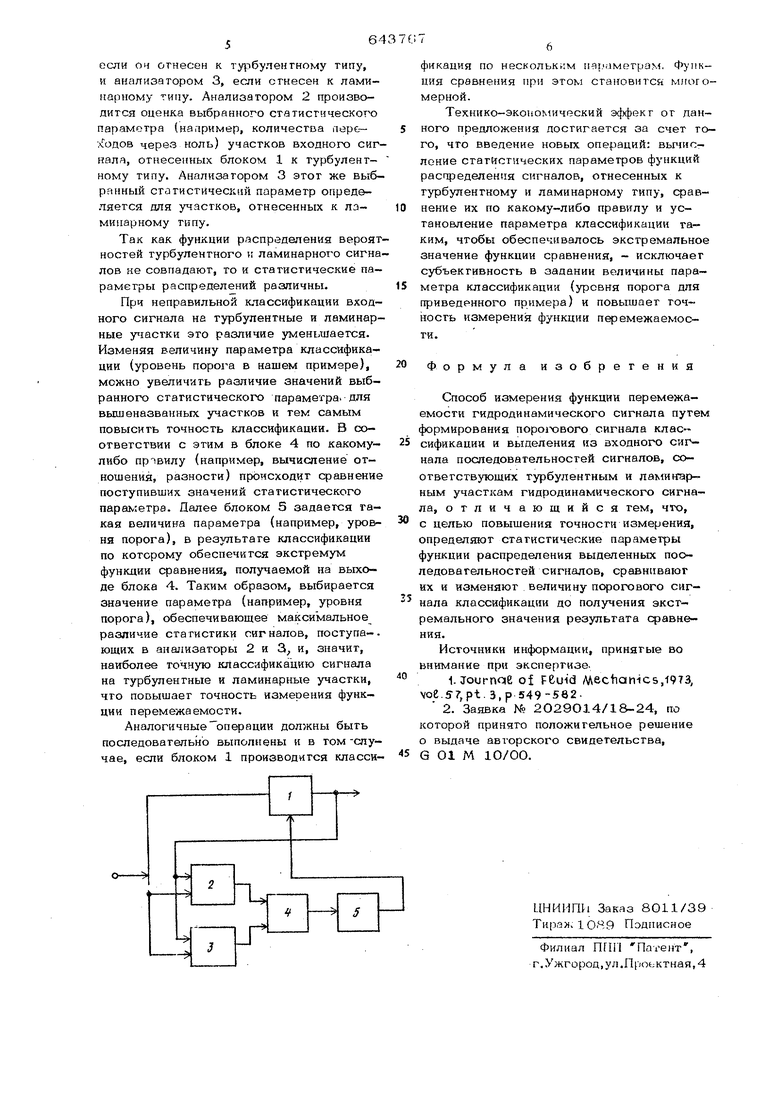
Изобретение огносигся к области гидродинамики Н вычислительной техники и может быть использовано для измерения функции перемежаемости в гидродинамических исследованиях. Функция перемежаемости 3(i)paBHa единице во время наличин турбулентности в данной точке потока и нулго во время наличия ламинарного движения в этой же точке. Известны способы измерения отдельных числовых характеристик функции пере межаемости, основанные на измерении: а)коэффициента перемежаемости , представляющего собой среднее значение функции перемежаемости и определяемого выражением: yeim- j3Ct)dt, где т - время, в течение которого определяется среднее значение функции перемежаемости l ;. б)средней частоты следования турбулентных пачек f2j . Эти способы основаны на измерении времени, в течение которого уровень сигнала перемежаемости превышает уровень установленного порога. Наиболее близким к предлагаемому является способ измерения функции перемежаемости гидродинамического сигнала путем формирования порогового сигналаК;тассификапии и выделения- из входного сигнала последовательностей сигналов, соответствующих турбулентным и лами участкам гидродинамического сигнала S . Недостатком аанного способа является то, что в нем не предусматривается установление величины параметра классификации (например, значения уровня порога или ве/{ичины -временного интервала сравнения) по-статнсгическим характеристикам исследуемо1Х5 процесса перемежаемости. В то же время результаты исследований показьюают, что погрешности измерения резко увеличиваются при неправильной установке порога. Поэтому измерения вышеуказанным способом неизбежно сопровождаготся погрэшносгями, обусловленными гем, что величина пара -летра по которому npf чзводигся классификация сигнала,, задается субъективно. Целью предложения является устранение неопределенности при задании значений устаггавливаемых параметров классификации (например, значения уровня поро га или величины временного интервала сравнения), что повьГШает точность измерения функции перемежаемости и устраняет необходимость предварительного детального изучения исследуемого npouetjca Поставленная цель достигается тем, чго определяют статистические параметры функций распределения выделенных последовательностей сигналов, сравнивают их и изменяют величину порогового сигнала классификации до получения экстремально го значения результата сравнения. В качестве статистического параметра функции распределения может быть вз то например, среднее число { ср.. пересечений сигналом о наличии турбулентного или ламинарного участка нулевого уровня Неравенство N4- Мд (1), где NT™ среднее число пересечений нуле вотх уровня сигналом о наличии турбулентного участка; Ыд среднее число пересечений нулв вого уровня сигналом о наличии ламинарного участка справедливо вследствие того, что спектр последовательностей CHI налов турбулентного движения,шире спек ра ламинарного движения и турбулентный сигнал более высокочастотный, чем лами нарный, т.е. пересечения нулевого уровня сигналом О наличии турбулентного участ ка более часты, чем пересечения сигна лом о наличии ламинарного участка. Очевидно, если классификация произве верно, то статистический параметр определяемый как среднее число пересечений нулевого фовня на участках перемежаемого сигнала, отнесенных к турбулентному типу, будет равен N у j а отнесенных к ламинарному типуЫ Н. При неправильной классификации статистический параметр . удозлетворяет неравенствам: N N1 Т Это обусловлено тем, что опртоле- Jjp. ние параметра N, ведется иугем усчорез нулевой рсднонии числа пе|)яхопов уровень не только по япгервалам времени сигнала собственно турбулентного движения, но и по интервалам ламинарного движения, неправильно отнесенного к т эбулентному типу. Это приводит к jMeHbuieHHro среднего числа пересечений нулевого уровня КД. для данных участков сигнала по сравнению со значением N-J- при правильной классификации. Определим функцию сравнения F, например, как разность W, Исходя из предыдущих неравенств видно, что экстремум функции сравнения F возможен только при правильной классификации. Он соответствует оптимальному значению порога классификации С, так как при устремлениизначения С к нулю или к величине, большей оптимального значения порога, будет происходить неправильная классификация, и .(Следовательно, угленьще- ние значения функции сравнения. . Таким образом, если в измерителе функции перемежаемости уровень параметра классификации (при пороговой классификации - уровень порога С ) выставить таким, что функция сравнения будет иметь экстремальное значение (в нашем примере максимальное), то данная классификация будет оптимальной. Устройство, реализующее предложенный способ) (см. чертеж) соде; жит: блок 1 классификации - разбиения ..входного гидродинамического сигнала на последовательности сигналов, соответствующих турбулентным или ламинарным участкам; анализатор 2 дли определения статистического параметра функции распределения сигнало.в, соответствующих турбулентным участкамj анализатор 3 для определения статистического параметра функции распределения сигналов, соответствующих ламинарным участкам; блок 4 сравнения статистических параметров, блок 5 поиска экстремума. Рассмотрим последовательность операций, при измерении функции перемежаемости в представленном устройстве. Входной гидродинамический сигнал поступает на блок 1, в котором происходит 1шассификация его .тyfJбyлeнтныx и ламинарных участков по какому-либо параметру классификации, например, по превышению сигналом определенного порога. Сигнал относится к турбулентному типу, если он превышает уровень порога, и к латчшнарпому - в протионом атучае. По сигналу с выхода блока 1 входной с,1Гг(пл aнaл 3lipyeтcя анализатором 2,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫДЕЛЕНИЯ ХАРАКТЕРНЫХ ФАЗ ПОВЕДЕНИЯ СИСТЕМ ПО ВРЕМЕННЫМ ДАННЫМ | 2007 |
|
RU2337610C1 |
| Способ обеспечения требуемой вероятности ложных срабатываний устройства классификации сейсмических сигналов | 2018 |
|
RU2697021C1 |
| Способ и устройство классификации сегментов зашумленной речи с использованием полиспектрального анализа | 2014 |
|
RU2606566C2 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| Способ измерения коэффициента перемещаемости | 1974 |
|
SU515124A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТОВ СИНХРОННОГО И АСИНХРОННОГО ПОВЕДЕНИЯ ДВУХ СВЯЗАННЫХ СИСТЕМ | 2010 |
|
RU2431857C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ, ВНОСИМЫХ АНАЛОГО-ЦИФРОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2012 |
|
RU2507681C2 |
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКОЙ ВЯЗКОСТИЖИДКОСТИ | 1972 |
|
SU347633A1 |
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 2007 |
|
RU2355028C2 |
