Изобретение относится к области сейсмической разведки и может быть использовано для мониторинга участков местности с ограниченным доступом, контроля несанкционированного доступа к охраняемым объектам, целеуказания средствам поражения, а также в устройствах управления подрывом инженерных боеприпасов.
Количество способов, на основе которых реализуют алгоритмы функционирования сейсмических устройств классификации подвижных объектов наземной техники (ОНТ), насчитывается достаточно много. Различие способов диктуется, во-первых, выбором тех или иных параметров сейсмических колебаний, связанных с каким-либо классификационным признаком ОНТ. Во-вторых, тем, на каких физических принципах будет реализовано функционирование таких устройств: электромагнитном, емкостном, тензорезистивном, пьезорезистивном, магнитоэлектрическом, волоконнооптическом, пьезоэлектрическом, с использованием молекулярно-электронной технологии или комбинированном. В-третьих, набором операций, составляющих содержание способа классификации, которые согласованы с первыми двумя пунктами.
Как правило, в патентах, где предлагаются способы обработки сигналов, на втором из перечисленных выше пунктов внимание не акцентируется. В патентах [1…3], представлено описание вариантов функционирования устройств, которые характеризуют способы классификации ОНТ, обнаруженных в зоне чувствительности, отличающиеся особенностями поиска в сейсмосигнале различных параметров сейсмических колебаний для использования их при отнесении ОНТ к какому-либо классу.
Например, в [1] используют частотные признаки для оценки степени близости принятых от источника возбуждения сейсмосигналов, к эталонным сейсмосигналам, которые хранятся в банке данных. Там же хранятся и значения сумм базисных функций, необходимых для вычисления значений частотных признаков в реальном масштабе времени.
При этом после обнаружения ОНТ сейсмосигнал нормируется по амплитуде и дискретизируется с учётом теоремы Котельникова. Затем он подвергается преобразованию Фурье, направленному на выделение классификационных признаков, которыми являются значения усредненных частотных составляющих в характерных для определения классов объектов частотных диапазонах.
После вычисления меры близости происходит выбор класса объекта: по критерию минимума значения меры выбираются два класса с сохранением информации о степени близости. Далее на основе анализа только частотных признаков сейсмического сигнала с использованием информации о частоте появления пар классов с учетом степени близости к эталону принимается решение о распознавании класса объекта. Для этого используется информация, представляющая собой статистические данные о частоте появления таких пар в виде матрицы также хранящаяся в банке данных.
К основным недостаткам способа можно отнести следующие:
- необходимость хранения в банке данных значения сумм базисных функций и матриц, содержащих статистические данные о частоте появления классов с учетом степени близости к эталону;
- при увеличении числа классов объектов распознавания для увеличения вероятности правильной классификации, необходимо увеличивать количество признаков, характерных для выбранных классов;
- громоздкость вычислительного алгоритма;
- частотные признаки зависимы от типа и состояния поверхностного слоя почвы, которое определяется как помеховыми факторами, таки погодно-климатическими условиями, поэтому при изменении состояния поверхностного слоя почвы в спектрах сейсмических сигналов будет наблюдаться смещение частотных компонент в область высоких или низких частот, что отрицательно повлияет на частотные признаки, а это снизит вероятность правильной классификации объектов.
В [2] используется тот факт, что случайные процессы могут описываться как авторегрессия некоторого порядка, характеризующая степень влияния предыдущих отсчетов сигнала на текущий отсчёт. Здесь по принятой реализации сейсмосигнала оценивают коэффициенты регрессии и сравнивают с хранящимися в банке данных усредненных моделей. Это позволяет вычислять условную вероятность принадлежности объекта к некоторому классу по результатам анализа принятого сейсмосигнала. Решение о классе объекта принимается по критерию максимума условной вероятности.
Недостатками этого способа являются:
- необходимость хранения в банке данных усреднённых моделей коэффициентов регрессии и сведений о законах их распределения;
- количество каналов классификации должно быть равно количеству классов объектов;
- громоздкость вычислительного алгоритма;
- коэффициенты регрессии относятся к параметрам, зависящим от типа и состояния грунта, времени года, помеховой обстановки и других факторов, поэтому при изменении свойств грунта в спектрах сейсмических сигналов будет наблюдаться смещение частотных компонент в область высоких или низких частот, то есть достоверное распознавание объектов по результатам анализа таких сигналов возможно при использовании результатов анализа динамики поведения сейсмосигнала на некотором заданном интервале времени.
Способ, описанный в [3], основан на анализе динамики изменения параметров принятого сейсмосигнала во времени и поиске закономерностей в поведении сейсмосигнала таких, как: время нарастания и спада фронтов, время пребывания сейсмосигнала в экстремумах и т.п. Наличие таких закономерностей дает возможность сделать заключение о том, что сейсмический сигнал должен в определенной последовательности проходить некоторые заданные условные пороги. Причем для разных источников возбуждения сейсмосигнала последовательность прохождения будет существенно различаться.
Так как объём информации о поведении сигналов от всех источников всегда ограничен, то строится усредненный образ сейсмосигнала (эталон) по результатам анализа нескольких десятков реализаций сейсмосигналов, возбуждаемых в поверхностном слое почвы при движении какого-либо класса ОНТ. Все остальные сейсмосигналы, которые в результате анализа не будут подходить под заданное правило с заданным значением точности, считаются нераспознанными или помехами. Сформированный усредненный образ сигнала в процессе работы хранится в банке в виде набора значений пороговых напряжений и значений временных интервалов прохождения этих порогов. Число тех и других определяется требованиями точности классификации ОНТ при анализе сейсмосигналов. При этом, чем больше число заданных порогов, тем точнее будут отслеживаться признаки ОНТ при анализе сейсмосигнала.
После регистрации сейсмосигнал подвергается предварительной фильтрации, усиливается в характерных полосах частот и производится его дискретизация в соответствии с теоремой Котельникова.
Дискретизированный сейсмосигнал анализируется в соответствии с алгоритмом, учитывающим наборы параметров, хранящихся в банке данных. Здесь контролируется выполнение ряда условий:
- должны быть превышены пороги, определяющие необходимое значение амплитуды сигнала;
- ряд временных критериев воздействия сигнала (период, длительность, паузы между импульсами) должны мало отличаться от эталонных.
При совпадении последовательности временных интервалов прохождения порогов с эталонными интервалами, хранящимися в банке данных, формируется логический сигнал о распознавании заданного класса объекта.
При необходимости осуществлять классификацию нескольких типов объектов следует иметь столько же каналов классификации, отличие которых в том, что в их банках будут храниться другие значения порогов срабатывания и другие временные интервалы их прохождения.
Приведённый выше анализ показывает, что основными недостатками данного способа будут следующие:
- необходимость хранения наборов эталонных значений пороговых напряжений и значений временных интервалов прохождения этих порогов для сравнения с временной структурой поступающих сейсмосигналов;
- обработка сигналов только во временной области может привести к тому, что воздействие внешних факторов (помех, погодно-климатических явлений и т.п.) скажется на перераспределении энергии частотных составляющих, что исказит временную структуру сейсмосигнала и приведёт к снижению вероятности правильной классификации объекта;
- возможность реализации обнаружения по сейсмическим сигналам, принятым при высоких уровнях сейсмофона, что при удалении источника сейсмических колебаний может снизить значения полезных сейсмосигналов до уровня выбросов сейсмофона и после обнаружения привести к ложной классификации.
Наиболее близким аналогом по технической сущности к предлагаемому является способ, описанный в [4], принятый за прототип.
В способе-прототипе обоснованно выбранная полоса рабочих частот ΔF = f1 – f2 = 32-10 = 22 Гц разделена на две части Δf1 = fx - f1 и Δf2 = f2 - fx+1 = ΔF - Δf1, где fx = 19 Гц – частота, делящая полосу ΔF в необходимом соотношении. При этом отношение содержащихся в этих полосах энергий сейсмофона, полученных его накоплением на промежутке времени наблюдения определённой длительности, было бы близко к единице. Такое равновесное состояние шумовых энергий в этих полосах позволяет определять значения энергий сейсмических сигналов, возбуждаемых различными классами ОНТ в поверхностном слое почвы, близких к истинным. Если же этот баланс нарушается, то необходимо периодически компенсировать отрицательное влияние перераспределения частотных составляющих в обоснованно выбранных низкочастотной и высокочастотной составляющих общей полосы частот.
Таким образом, в отсутствии или наличии объектов наземной техники:
1. Дискретизируются три компоненты либо естественного сейсмического фона  , либо смеси полезного сейсмосигнала и сейсмофона
, либо смеси полезного сейсмосигнала и сейсмофона  , регистрируемых в аналоговом виде в полосе ΔF, с частотой дискретизации fd и получают три соответствующие дискретизированные компоненты
, регистрируемых в аналоговом виде в полосе ΔF, с частотой дискретизации fd и получают три соответствующие дискретизированные компоненты  или соответственно
или соответственно  с количеством отсчётов в каждой, зависящим от величины времени наблюдения: i = 0, 1, … .
с количеством отсчётов в каждой, зависящим от величины времени наблюдения: i = 0, 1, … .
2. Вводят количество частотных отсчётов Nf : n = 0, 1,… , Nf-1 - текущие номера отсчётов, вводят последовательность периодов дискретизации (скользящих временных окон, на которых укладывается Np временных отсчёта, причём Np·Δt = 1, где Δt = 1/fd, а fd – частота дискретизации), количество которых также определится величиной времени наблюдения: k = 0, 1, … - номера текущих позиций временных окон
 (1)
(1)
где hk = kNp. Следовательно, величины (1) представляют собой матрицы, где каждая строка является временным окном на k-ой текущей позиции, содержащая входящие в неё с 0-го по (Np-1)-й отсчёты.
В отсутствии объектов наземной техники:
1. На выбранной длительности промежутка времени наблюдения сейсмофона, содержащем Nu текущих позиций временного окна, с использованием преобразования Фурье находят текущие спектральные плотности трёх компонент естественного сейсмического фона в полосе ΔF, определяют полную спектральную плотность сейсмофона в этой полосе
 .
.
Здесь
текущие спектральные плотности x-, y- и z- компонент сейсмофона на k-ой позиции временного окна;  - мнимая единица.
- мнимая единица.
2. В найденных частотных полосах Δf1 = 19-10=9 Гц и Δf2 = 32-20=12 Гц находят текущие значения полных энергий сейсмофона
 , и
, и  , где
, где
энергии компонент сейсмофона в соответствующих частотных полосах.
3. Обеспечивают фильтрацию этих энергий комплементарным фильтром с подобранными коэффициентами усиления К1 и К2:
 .
.
4. Находят отношение текущих значений отфильтрованных энергий сейсмофона в общем случае неравного единице
 .
.
5. Вычисляют среднее значение по всем текущим отсчётам интервала наблюдения
 . (2)
. (2)
Скобки < * > означают операцию усреднения на длительности временного окна.
6. Находят выравнивающий коэффициент как величину, обратную (2)
 .
.
7. Компенсируют влияние внешних факторов на распределение энергии сейсмофона по частотным составляющим полос (восстанавливают энергетический баланс относительно порога равновесия равного единице)
 .
.
8. Периодически оценивают величину соотношения (2), находят текущее значение выравнивающего коэффициента и с его помощью восстанавливают баланс энергий сейсмофона в частотных полосах? Δf1 и Δf2, если это потребуется.
При воздействии сейсмосигналов от ОНТ.
По аналогии с (2) с учётом использования найденного на последнем оценочном промежутке времени наблюдения значения выравнивающего коэффициента определяют отношение энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе
 . (3)
. (3)
Показано, что при соблюдении баланса энергий сейсмофона в низкочастотной и высокочастотной полосах отношение текущих значений энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе  к средней энергии сейсмофона
к средней энергии сейсмофона  , вычисленной в последнем промежутке времени наблюдения в отсутствии подвижных объектов, определяемое соотношением
, вычисленной в последнем промежутке времени наблюдения в отсутствии подвижных объектов, определяемое соотношением
 , (4)
, (4)
для гусеничных объектов будет больше, чем для колёсных объектов при одинаковом траверзном расстоянии. Этот факт определил операцию способа-прототипа, которая приведена ниже и придала последовательности отсчётов безразмерного критерия классификации вид, схожий с профилем «лоханки», минимум которой соответствует точке траверза:
 . (5)
. (5)
То есть, текущие значения (5), с учётом сказанного выше о величине (4), должны иметь тенденцию к уменьшению до точки траверза и к увеличению после этой точки. При этом последовательность минимальных значений (5), сгруппированных в небольшой окрестности вокруг точки траверза для гусеничных объектов должны располагаться ниже аналогичных последовательностей значений (5) для колёсной техники. Здесь под траверзным расстоянием понимается кратчайшее расстояние между сейсмическим датчиком и осевой линией трассы возможного следования ОНТ. Под траверзом понимается направление вдоль траверзного расстояния относительно осевой линии маршрута возможного следования ОНТ. Под точкой траверза понимается координата, в которой пересекаются линия, проходящая вдоль траверзного расстояния и осевая линия маршрута. Когда текущие координаты ОНТ, движущегося по трассе, оказываются в ближайшей окрестности точки траверза, то это, как правило, соответствует малой окрестности глобального максимума выходного сигнала сейсмодатчика.
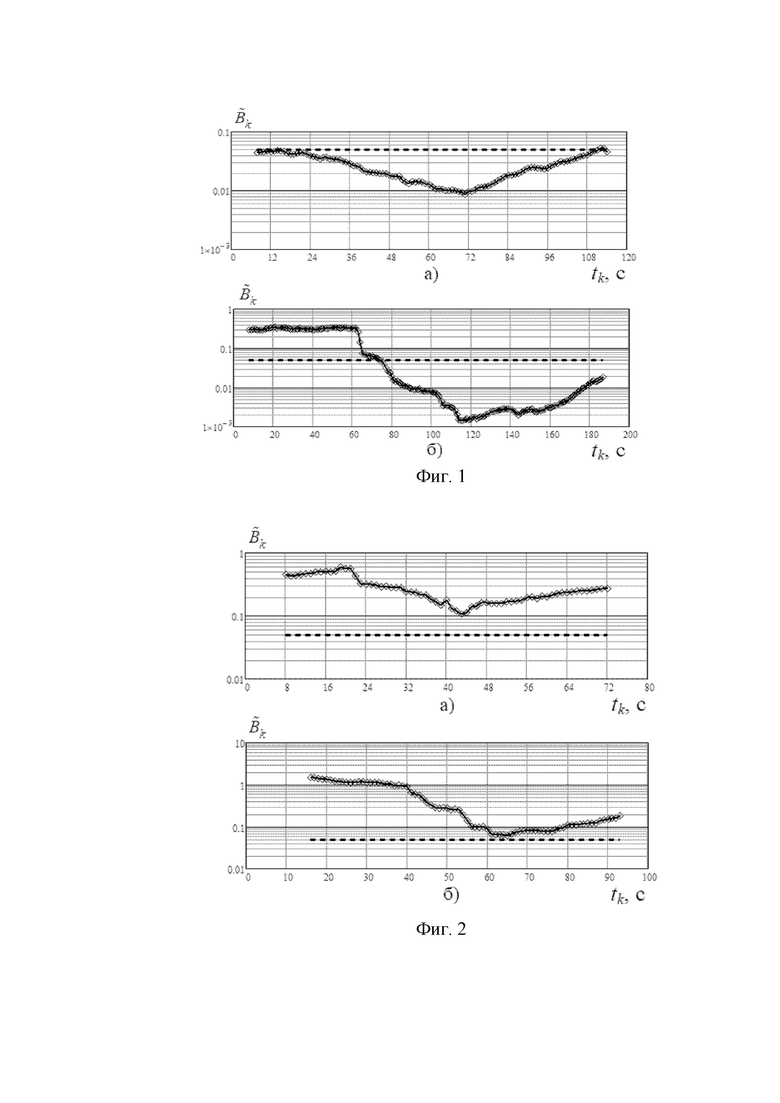
Проведённые в [4] исследования достаточно представительной статистики сейсмосигналов от ОНТ изучаемых классов вполне подтвердили вывод, сформулированный в третьем пункте. В качестве иллюстрации на фиг. 1 и фиг. 2 представлены графические зависимости (5), относящиеся к объектам различных классов: фиг. 1а) – ОНТ относящийся к лёгкой гусеничной технике (ЛГТ), фиг. 1б) – ОНТ относящийся к тяжёлой гусеничной технике (ТГТ), фиг. 2а) – ОНТ относящийся к лёгкой колёсной технике (ЛКТ), фиг. 2б) – ОНТ относящийся к тяжёлой колёсной технике (ТКТ). На этих иллюстрациях жирной горизонтальной линией показан статистически обоснованный уровень порога классификации.
Из анализа фиг. 1 и фиг. 2 следует, что в среднестатистическом смысле действительно последовательность минимальных значений (5), сгруппированных в небольшой окрестности вокруг точки траверза (соответствует минимумам кривых) для гусеничных объектов располагаются ниже среднестатистического порога классификации, в то время как аналогичные последовательности значений (5) для колёсной техники располагаются выше этого порогового значения.
В качестве основного недостатка способа-прототипа можно указать на то, что важнейший параметр, от которого будут зависеть вероятностные характеристики рабочего алгоритма устройства, реализующего данный способ, является статистическим. То есть в принципе существует вероятность формирования таких условий регистрации сейсмосигналов от ОНТ, для которых величина такого среднестатистического порога может привести к перепутыванию классов ОНТ. Кроме того, как показывает практика, в большинстве случаев для достаточно надёжной классификации ОНТ с использованием сейсмических датчиков достаточно обрабатывать только вертикальную компоненту (z-компоненту) сейсмосигнала, тогда как в способе-прототипе для этого обрабатываются все три его компоненты (x-, y- и z-компоненты), что делает алгоритм более громоздким и требует дополнительных ресурсов памяти контроллера. Кроме того в способе-прототипе не предусмотрена оценка, по которой ОНТ можно относить к категории «лёгкий» (ЛКТ, ЛГТ) или «тяжёлый» (ТКТ, ТГТ) в своём классе.
Задача предлагаемого способа – обеспечение более высоких вероятностно-временных и информативных характеристик функционирования устройства классификации объектов наземной техники при упрощении рабочего алгоритма классификации.
Для решения поставленной задачи в способе классификации подвижных объектов наземной техники по сейсмическому сигналу, включающем регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, фильтрацию его z-компоненты в выбранной полосе частот, её усиление и дискретизацию, осуществление деления выбранного диапазона рабочих частот на две полосы: низкочастотную и высокочастотную по условию равенства в них спектральных плотностей сейсмофона;
в отсутствии объекта в зоне чувствительности сейсмодатчика периодическую оценку средней величины отсчётов энергии сейсмофона в выбранной полосе за время наблюдения сейсмофона, а также значения отсчётов коэффициента выравнивания энергий сейсмофона в этих полосах, как величины обратной отношению усреднённой на промежутке времени наблюдения величины отсчётов энергии сейсмофона низкочастотной полосы к усреднённой на этом же временном промежутке величине отсчётов энергии сейсмофона высокочастотной полосы;
в присутствии подвижного объекта наземной техники на длительности текущего временного окна осуществление деления величины отсчётов энергии смеси z-компоненты полезного сейсмосигнала и сейсмофона в низкочастотной полосе на величину отсчётов энергии смеси z-компоненты полезного сейсмосигнала и сейсмофона в высокочастотной полосе, домножения отсчётов полученного частного от деления на последнюю оценку значения отсчётов выравнивающего коэффициента, согласно изобретению, результат последней текущей операции усредняется на определённом количестве отсчётов, расположенных в малой окрестности точки траверза, результат усреднения сравнивается с единичным порогом; если результат усреднения оказывается расположенным выше единичного порога, то выносится решение о том, что обнаруженный объект относится к классу колёсной техники, если же его величина превысит единичный порог, то обнаруженный объект относится к классу гусеничной техники; одновременно в малой окрестности точки траверза осуществляются операции компенсации пространственных потерь энергии сейсмосигнала и потерь, связанных с затуханием его в почве, определяющие приведение энергии отсчётов сейсмосигнала к состоянию на момент возбуждения сейсмосигнала объектом, пересекающим траверз, операции по оценке величины максимального значения приведённой энергии сейсмосигнала, которая принимается в качестве условного «веса» обнаруженного объекта; отнесение обнаруженного объекта к категории «лёгкий» или «тяжёлый» в своём классе осуществляется путём сравнения величины его условного «веса» с соответствующим статистически обоснованным для данного класса техники порогом; если условный «вес» обнаруженного объекта меньше величины соответствующего порога, то объект относят к категории «лёгкий» в своём классе, если же условный «вес» объекта превышает по величине этот порог, то объект относят к категории «тяжёлый» в этом классе.
Заявляемый способ использует в соответствующих операциях только z-компоненты сейсмосигналов, генерируемых подвижными объектами наземной техники в зоне чувствительности регистрирующих устройств, вместо соотношения (5) использует выражение (3), а также вводит операции над сейсмосигналами, позволяющие осуществлять выработку критерия отнесения объектов наземной техники к категории «лёгкий» или «тяжёлый» в своём классе.
Предлагаемый способ заключается в следующем.
В отсутствии или наличии объектов наземной техники.
1. Дискретизировать z- компоненту либо естественного сейсмического фона  , либо смеси полезного сейсмосигнала и сейсмофона
, либо смеси полезного сейсмосигнала и сейсмофона  , регистрируемых в аналоговом виде в полосе ΔF, с частотой дискретизации fd и получить соответствующие дискретизированные z-компоненты
, регистрируемых в аналоговом виде в полосе ΔF, с частотой дискретизации fd и получить соответствующие дискретизированные z-компоненты  или соответственно
или соответственно  с количеством отсчётов в каждой, зависящим от величины времени наблюдения: i = 0, 1, 2, … .
с количеством отсчётов в каждой, зависящим от величины времени наблюдения: i = 0, 1, 2, … .
2. Ввести количество частотных отсчётов Nf : n = 0, 1,… , Nf-1 - текущие номера отсчётов, ввести последовательность периодов дискретизации (скользящих временных окон, на которых укладывается Np временных отсчёта), количество которых также определится величиной времени наблюдения: k = 0, 1, … - номера текущих позиций временных окон
 (6)
(6)
где hk = kNp. Следовательно, величины (6) также представляют собой матрицы, где каждая строка является временным окном на k-ой текущей позиции, содержащая входящие в неё с 0-го по (Np-1)-й отсчёты.
В отсутствии объектов наземной техники:
1. На выбранной длительности промежутка времени наблюдения сейсмофона, содержащем Nu текущих позиций временного окна, с использованием преобразования Фурье найти текущие спектральные плотности z-компоненты естественного сейсмического фона в полосе ΔF, определить спектральную плотность сейсмофона в этой полосе
 . (7)
. (7)
Здесь
 (8)
(8)
текущие отсчёты спектральной плотности z-компоненты сейсмофона на k-ой позиции временного окна.
2. В найденных частотных полосах Δf1 = 19-10=9 Гц и Δf2 = 32-20=12 Гц найти текущие значения полных энергий сейсмофона  и
и  , где
, где
 (9)
(9)
энергии z-компонент сейсмофона в соответствующих частотных полосах.
3. Обеспечить фильтрацию этих энергий комплементарным фильтром с подобранными коэффициентами усиления К1 и К2:
. (10)
4. Найти отношение текущих значений отфильтрованных энергий сейсмофона в общем случае неравного единице
.
5. Вычислить среднее значение этого отношения по всем текущим отсчётам временного окна
. (11)
6. Найти выравнивающий коэффициент как величину, обратную (11)
.
7. Скомпенсировать влияние внешних факторов на распределение энергии сейсмофона по частотным составляющим полос (восстановить энергетический баланс относительно порога равновесия равного единице)
. (12)
8. Периодически оценивать величину соотношения (11), находить текущее значение выравнивающего коэффициента  и с его помощью восстанавливать баланс энергий сейсмофона в частотных полосах Δf1 и Δf2, если это потребуется.
и с его помощью восстанавливать баланс энергий сейсмофона в частотных полосах Δf1 и Δf2, если это потребуется.
При воздействии сейсмосигналов от объектов наземной техники
9. По аналогии с (11) с учётом использования найденного на последнем оценочном промежутке времени наблюдения значения выравнивающего коэффициента  определить отношение энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе
определить отношение энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе
. (13)
10. Одновременно осуществлять оценку положения на временной оси глобального максимума энергии сейсмосигнала от обнаруженного ОНТ, так как сейсмические колебания регистрировались сейсмическим датчиком пьезорезистивного типа, который характеризуется средней чувствительностью. Следовательно, критерий (13) необходимо оценивать в ближайшей окрестности точки траверза. Для этого при оценке временного положения глобального максимума энергии сейсмосигнала необходимо обеспечить компенсацию потерь на распространение его в пространстве и потерь, связанных с затуханием в почве.
Ниже для этих целей приведена таблица 1.
Таблица 1
В таблице 1, исходя из накопленного опыта и известных работ по сейсмологии, представлены некоторые типы грунтов и соответствующие им коэффициенты ослабления: Кг – за счёт поглощения в грунте, КR – за счёт пространственных потерь. Под символом R подразумевается траверзное расстояние. Очевидно, что общий коэффициент ослабления для каждого типа грунта будет равен произведению коэффициентов, представленных в таблице, то есть Кп = Кг·КR. Далее необходимо определить момент пересечения ОНТ траверза, который должен соответствовать временному положению глобального максимума энергии сейсмосигнала, генерируемого данным ОНТ. Вариантов поиска глобального максимума непрерывных и дискретно-непрерывных функций существует достаточно много, и они описаны в соответствующей литературе. При этом надо стремиться к тому, чтобы момент окончания полного цикла рабочего алгоритма располагался как можно ближе к точке траверза в момент пересечения траверза ОНТ. Один из вариантов такого поиска использован в данном способе. Особенность его состоит в том, что окрестность вокруг точки траверза Δtр = tк – tн, в которой осуществляются основные операции и принимаются решения, в основном составляет от 4 до 8 секунд. Здесь tн – момент начала осуществления основных операций очередного рабочего цикла алгоритма и принятия решений, tк – момент окончания этого цикла, а текущее значение будет tk = k·Np·Δt – секундные отсчёты.
11. Отфильтрованные энергии сейсмосигнала низкочастотной и высокочастотной полос, найденные выше, суммируются и потери энергии в какой-то степени компенсируются приведением энергии к состоянию на момент возбуждения сейсмосигнала объектом, пересекающим траверз
 . (14)
. (14)
Здесь  - оценка величины приведённой энергии, а моменты прохождения ОНТ траверза будут соответствовать положениям отсчётов с максимальным значением приведённой энергии соответствующих сейсмосигналов на временной оси
- оценка величины приведённой энергии, а моменты прохождения ОНТ траверза будут соответствовать положениям отсчётов с максимальным значением приведённой энергии соответствующих сейсмосигналов на временной оси
 , (15)
, (15)
где nЛКТ = 0, 1, …, NЛКТ-1; nТКТ = 0, 1, …, NТКТ-1; nЛГТ = 0, 1, …, NЛГТ-1 и nТГТ = 0, 1, …, NТГТ-1.
12. В зависимости от найденного класса ОНТ в качестве категории, характеризующей его условный «вес» («лёгкий»-«тяжёлый»), принимают оценку приведённой энергии соответствующего сейсмосигнала в момент пересечения ОНТ траверза (15).
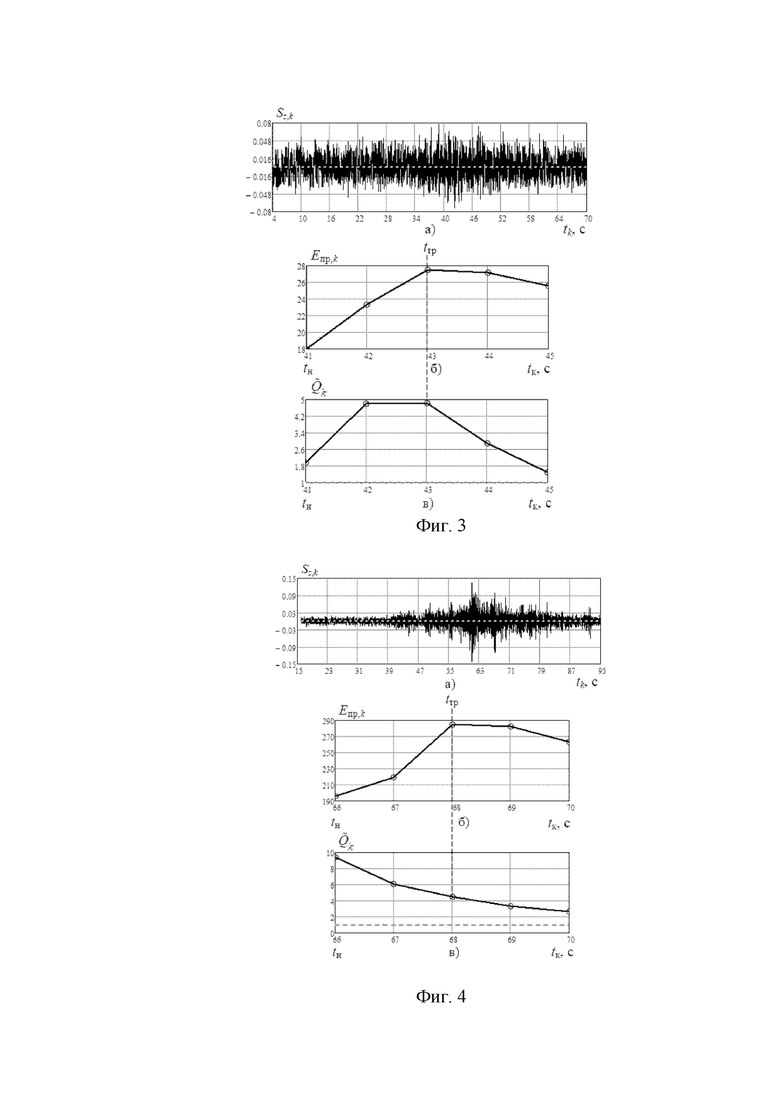
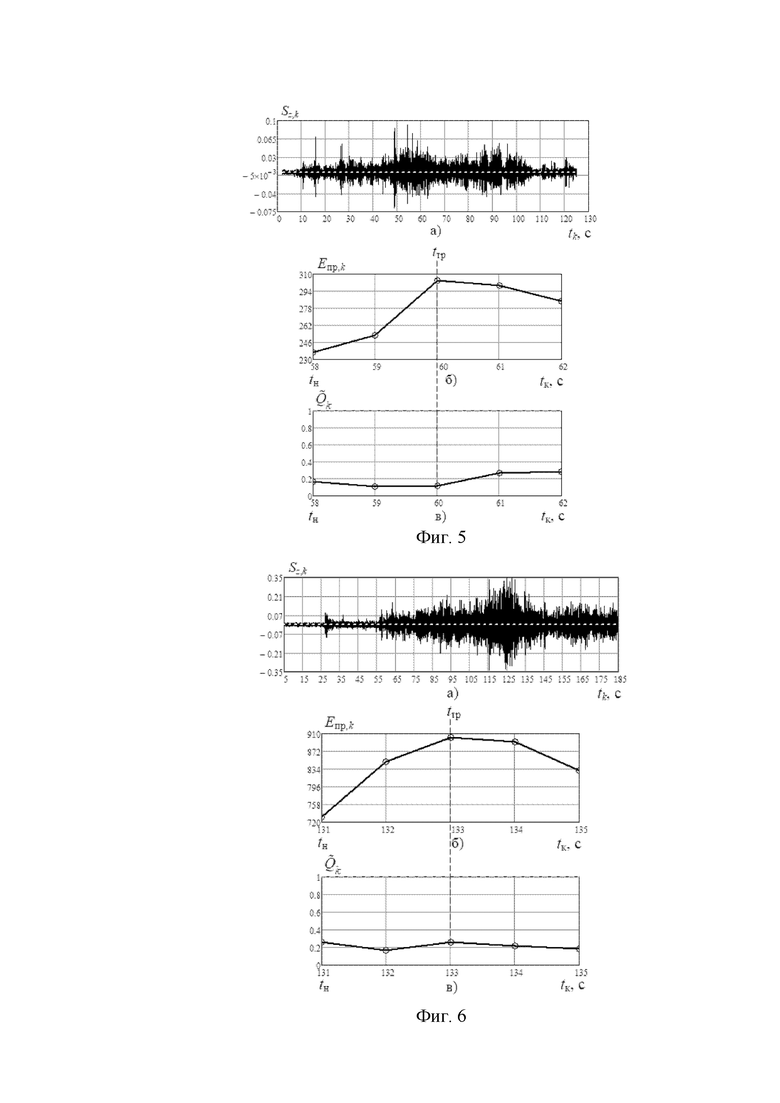
В качестве материала, иллюстрирующего устойчивость предлагаемого способа разделения ОНТ на классы «колесо-гусеница», на фигурах 3 – 6 представлены результаты обработки z-компонент сейсмосигналов от четырёх ОНТ различных классов: на фиг. 3 – от легкового автомобиля, относящегося к классу ЛКТ (R = 40 м, V = 30 км/ч), на фиг. 4 – от грузового автомобиля, относящегося к классу ТКТ (R = 100 м, V = 40 км/ч), на фиг. 5 – от бронированного ОНТ, относящегося к классу ЛГТ (R = 200 м, V = 25-30 км/ч) и на фиг. 6 – от бронированного ОНТ, относящегося к классу ТГТ (R = 200 м, V = 30 км/ч).
Из анализа этих иллюстраций следует, что все представленные на фиг. 3а), 4а), 5а) и 6а) z-компоненты сейсмосигналов подвержены достаточно сильному влиянию канальных шумов и помех. Тем не менее, отсчёты критерия классификации Qk (13) в малой окрестности точки траверза для всех этих ОНТ с избытком удовлетворяют требованиям правильной классификации ОНТ. Окончательное решение о принадлежности ОНТ к какому-либо классу наземной техники принимается после усреднения (13) на отрезке Δtр
 . (16)
. (16)
Это связано с вероятностью выброса некоторых отсчётов (13) на отрезке Δtр в неблагоприятном для данного класса ОНТ направлении и повышает устойчивость правильной классификации к воздействию внешних факторов. В (16) верхние знаки «<» означают выбор класса «ГТ», нижние знаки «>» - выбор класса «КТ». При этом приведённые энергии сейсмосигналов (особенно в малой окрестности точки траверза), генерируемых «тяжёлыми» ОНТ в поверхностном слое почвы, многократно превышают аналогичные энергии, генерируемые «лёгкими» ОНТ, что используется для разделения ОНТ внутри одного класса на «лёгкие» и «тяжёлые».
С использованием предлагаемого способа был проведён анализ более 130 записей сейсмосигналов от объектов наземной техники классов «колесо» и «гусеница» «лёгких» (ЛКТ, ЛГТ) и «тяжёлых» (ТКТ, ТГТ). Сейсмосигналы записаны в летне-осеннее время при различных параметрах движения ОНТ (скорости движения, траверзные расстояния, направление движения относительно точки траверза). Почва, на которой расположен полигон с контрольно-измерительной трассой (КИТ), а также и грунтовые дороги, по которым также прогонялись некоторые из ОНТ, относилась к песчаному типу.
На основе соответствующей статистической обработки результатов оценки величины отсчётов с максимальным значением приведённой энергии соответствующих сейсмосигналов от колёсной и гусеничной техники (15) проведено обоснование величины двух пороговых уровней – для колёсной и гусеничной техники соответственно. Уровни этих порогов таковы, что произвольный отсчёт приведённой энергии (15) для «лёгкого» ОНТ любого класса с вероятностью 0.95 будет оставаться ниже «своего» порога. Для каждого ОНТ какого-либо класса, осуществляется сравнение величины (15) с соответствующим порогом. Если величина отсчёта (15) для ОНТ данного класса не превышает этот порог, то этот ОНТ относят к «лёгкому» в этом классе. Если же величина отсчёта (15) для ОНТ данного класса превысила этот порог, то этот ОНТ относят уже к «тяжёлому» в этом классе.
При обработке записей сейсмических сигналов получают экспериментальные эквиваленты вероятностей обнаружения соответствующих ОНТ. Эти эквиваленты называются частостями и обозначают символом р*. При этом близость значений этих частостей к заданным значениям вероятностей обнаружения р напрямую зависит от количества прогонов ОНТ по КИТ при записи сигналов от них. Чем больше количество прогонов, тем с большей достоверностью можно заменять вероятности соответствующими частостями. Разность между частостью и соответствующей вероятностью α = р*- р будет характеризовать надежность получаемых экспериментальных результатов. Здесь р* - частость появления события в испытании, а р – соответствующая ей вероятность. Доверительная вероятность при заданном количестве прогонов ОНТ по КИТ β ≈ 1- α = 1- . То есть с доверительной вероятностью β можно ожидать, что ошибка от замены вероятности, характеризующей достаточность набора сигналов (прогонов ОНТ по КИТ), частостью (экспериментальная величина) не превзойдет заданного значения.
. То есть с доверительной вероятностью β можно ожидать, что ошибка от замены вероятности, характеризующей достаточность набора сигналов (прогонов ОНТ по КИТ), частостью (экспериментальная величина) не превзойдет заданного значения.
В общем случае значение частоты события р* может быть большим или малым. В этом случае доверительный интервал, который с доверительной вероятностью β накрывает среднестатистическую вероятность р, соответствующую данной частости, строят, исходя из точного закона распределения частоты события. Это биномиальное распределение. Ведь число появления события Х в N опытах описывается именно им: вероятность того, что событие Х появится ровно m раз равна  , где q = 1 - p,
, где q = 1 - p,  - биномиальные коэффициенты. При этом в отличие от нормального распределения, биномиальное не обладает симметрией. Далее использовались соотношения из [5], которые ограничивают "доверительную область" границами доверительного интервала.
- биномиальные коэффициенты. При этом в отличие от нормального распределения, биномиальное не обладает симметрией. Далее использовались соотношения из [5], которые ограничивают "доверительную область" границами доверительного интервала.
В общем случае на практике неизвестен класс объекта наземной техники, вторгшегося в зону чувствительности сейсмодатчика, поэтому среднестатистическая вероятность правильной классификации ОНТ Рпк с учётом их условного «веса», а также величины соответствующих им доверительных интервалов оценивались, исходя из общего числа записей N для доверительной вероятности β = 0.95. Получена величина среднестатистической вероятности правильной классификации ОНТ с учётом вероятности правильной оценки условного «веса» в данном классе Рпк = 0.947 с границами доверительного интервала шириной 8.5% 0.893 ≤ Рпк ≤ 0.978.
Таким образом, достигаемый технический результат состоит в повышении устойчивости алгоритма функционирования устройства, реализующего регистрацию и обработку сейсмосигналов от подвижных ОНТ к изменению погодно-климатических условий и уровня долговременных внешних шумовых или помеховых факторов.
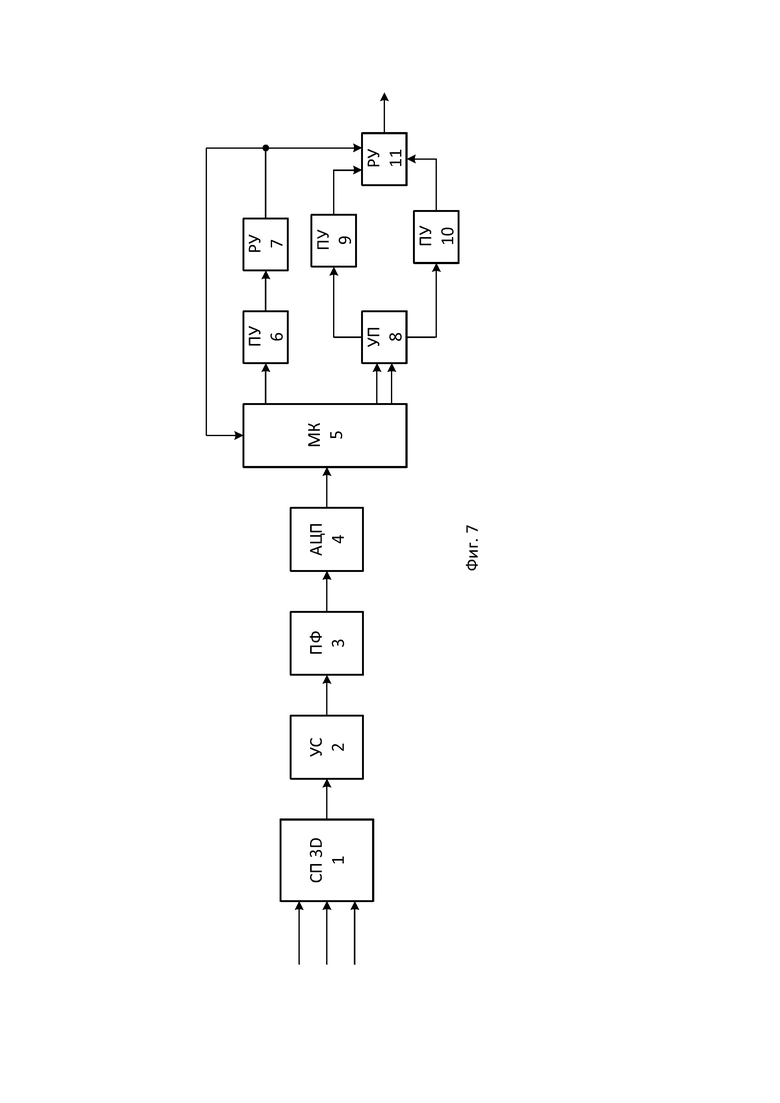
Заявляемый способ может быть реализован устройством, укрупнённая блок-схема которого представлена на фиг. 7, где введены следующие обозначения:
1 – трёхкомпонентный сейсмоприёмник, три оси чувствительности которого взаимно ортогональны (СП 3D);
2 – усилитель z-компоненты сейсмосигнала сигнала (УС);
3 – полосовой фильтр z-компоненты сейсмосигнала (ПФ);
4 – аналого-цифровой преобразователь (АЦП);
5 – микроконтроллер (МК);
6, 9, 10 – первое, второе и третье пороговые устройства (ПУ);
8 – управляемый переключатель на два положения (УП);
7, 11 – первое и второе решающие устройства (РУ).
Устройство содержит последовательно соединенные трёхкомпонентный сейсмоприёмник 1, усилитель z-компоненты сейсмосигнала 2, полосовой фильтр z-компоненты сейсмосигнала 3, аналого-цифровой преобразователь 4 и микроконтроллер 5, первый выход которого через последовательно соединенные первое пороговое устройство 6 и первое решающее устройство 7 соединен с первым входом второго решающего устройства 11, выход которого является выходом устройства. При этом выход первого решающего устройства 7 соединен со вторым входом микроконтроллера 5. Второй и третий выходы микроконтроллера 5 соединены с первым и вторым входами управляемого переключателя на два положения 8, первый выход которого соединен с входом второго порогового устройства 9, выход которого соединен со вторым входом второго РУ 11. Второй выход управляемого переключателя на два положения 8 соединен с входом третьего порогового устройства 10, выход которого подсоединен к третьему входу второго РУ 11. Трёхкомпонентный сейсмоприёмник 1 имеет три входа, на которые поступают три взаимно ортогональные компоненты сейсмосигнала.
С момента обнаружения ОНТ устройство классификации работает следующим образом.
В исходном состоянии управляемый переключатель 8 находится в положении, при котором оба его выхода блокированы. На три входа трёхкомпонентного сейсмоприёмника 1 поступают три взаимно ортогональные компоненты сейсмосигнала, где они преобразуются в электрические сигналы. Электрический сигнал с выхода трёхкомпонентного сейсмоприёмника 1, соответствующего z-компоненте сейсмосигнала, поступает на вход усилителя 2, где усиливается до необходимой величины. С выхода усилителя 2 сигнал поступает на вход полосового фильтра 3 с полосой пропускания равной Δf = 22 Гц и граничными частотами fн = 10 Гц, fв = 32 Гц. Отфильтрованный сигнал с выхода полосового фильтра 3 поступает на вход аналого-цифрового преобразователя 4, где подвергается дискретизации и с его выхода уже дискретизированный сигнал поступает на вход микроконтроллера 5. В микроконтроллере 5 в зависимости от наличия или отсутствия объекта наземной техники осуществляется обработка дискретизированной z-компоненты в соответствии с соотношениями (6)÷(12). Результаты в виде значений ткущих отсчётов с первого выхода микроконтроллера 5 поступают на вход первого порогового устройства 6, где контролируется их положение относительно величины единичного порога. Результат этого контроля с выхода первого порогового устройства 6 поступает на вход первого решающего устройства 7, в котором принимается решение о принадлежности обнаруженного подвижного объекта к какому-либо из классов «КТ» или «ГТ» и результат классификации в соответствующих форматах поступает с выхода первого РУ 7 одновременно на второй вход контроллера 5 и первый вход второго РУ 11.
Если результатом классификации является класс «КТ», то со второго выхода микроконтроллера 5 на первый вход управляемого переключателя 8 поступит команда, которая разблокирует вход второго порогового устройства 9 для колёсной техники и с его выхода на второй вход второго РУ 11 поступит сигнал в соответствующем формате и с выхода второго решающего устройства 11 потребителю поступит результат полной классификации ОНТ: «ЛКТ» или «ТКТ».
Если же результатом классификации является класс «ГТ», то с третьего выхода микроконтроллера 5 на второй вход управляемого переключателя 8 поступит команда, которая разблокирует вход третьего порогового устройства 10 для гусеничной техники и с его выхода на третий вход РУ 11 поступит сигнал в соответствующем формате и с его выхода потребителю поступит результат полной классификации ОНТ: «ЛГТ» или «ТГТ». На этом очередной цикл рабочего алгоритма классификации заканчивается, все устройства возвращаются в исходное состояние до обнаружения очередного объекта наземной техники.
Реализация данного устройства не вызывает затруднений, так как все его блоки, являются достаточно часто используемыми в инженерных разработках и описаны в патентах.
Источники информации
1. Патент 2311665 (РФ). Сейсмическое устройство обнаружения и классификации объектов. МПК G01V 1/16. Сизов А.С., Стребков Д.А., Челышов С.Ю. Заявка № 2006112075/28 от 11.04.2006. Опубл. 27.11.2007 г.
2. Патент 2202811 (РФ). Устройство обнаружения и классификации сейсмических сигналов. МПК G01V 1/16. Крюков И.Н., Иванов В.А., Дюгованец А.П., Афанасенко А.В. Заявка № 2002113466/28 от 23.05.2002. Опубл. 20.04.2003 г.
3. Патент 2236027 (РФ). Устройство классификации сейсмических сигналов. МПК G01V 1/16. Крюков И.Н., Иванов В.А., Матвеев В.В. Заявка № 2003118053/28 от 19.06.2003. Опубл. 10.09.2004 г.
4. Патент 2776588 (РФ). Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой. МПК G01V 1/00, G08B 13/00. Афанасьев О.В., Чаплыгин А.А., Подтынников Н.А., Лукьянчиков В.Д., Нартов А.Ю. Заявка: № 2021127060 от 14.09.2021. Опубл. 22.07.2022 г.
5. Вентцель, Е.С. Теория вероятностей. / Е.С. Вентцель. – М.: Наука, 1969. – 576 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Способ классификации вертолётов с одним несущим винтом на режиме горизонтального полёта | 2024 |
|
RU2834238C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2236027C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
Изобретение относится к области сейсмической разведки и может быть использовано в охранно- и разведывательно-сигнализационных комплексах и системах для различения обнаруженных подвижных объектов наземной техники (ОНТ) по классам. Предложен способ классификации подвижных объектов наземной техники по сейсмическому сигналу, в котором осуществляется выбор диапазона рабочих частот ΔF, характерного для сейсмических колебаний почвы, возбуждаемых объектами наземной техники конкретных классов, деления этого общего диапазона частот ΔF на две полосы Δf1 и Δf2 таким образом, что в каждой из этих полос концентрируется большая часть энергии сейсмических колебаний от «своего» класса ОНТ. При этом в отсутствии ОНТ в зоне чувствительности сейсмического датчика с заданной периодичностью осуществляется калибровка, заключающаяся в выравнивании энергии канальных шумов в частотных полосах Δf1 и Δf2. Отклонение величины отношения усреднённой на некотором промежутке времени величины энергии сейсмических колебаний, сосредоточенной в низкочастотной полосе Δf1 к усреднённой на этом же временном промежутке энергии этих колебаний, сосредоточенных в высокочастотной полосе Δf2 от единичного уровня в большую или меньшую сторону с учётом величины коэффициента выравнивания является признаком соответствующего класса обнаруженного ОНТ. Отнесение ОНТ к категории «лёгкий» или «тяжёлый» в своём классе достигается оценкой максимума энергии сейсмосигнала в малой окрестности точки траверза с учётом компенсации пространственных потерь и потерь за счёт затухания в почве. Технический результат – повышение устойчивости алгоритма функционирования устройства, реализующего регистрацию и обработку сейсмосигналов от подвижных ОНТ к изменению погодно-климатических условий и уровня долговременных внешних шумовых или помеховых факторов. 7 ил., 1 табл.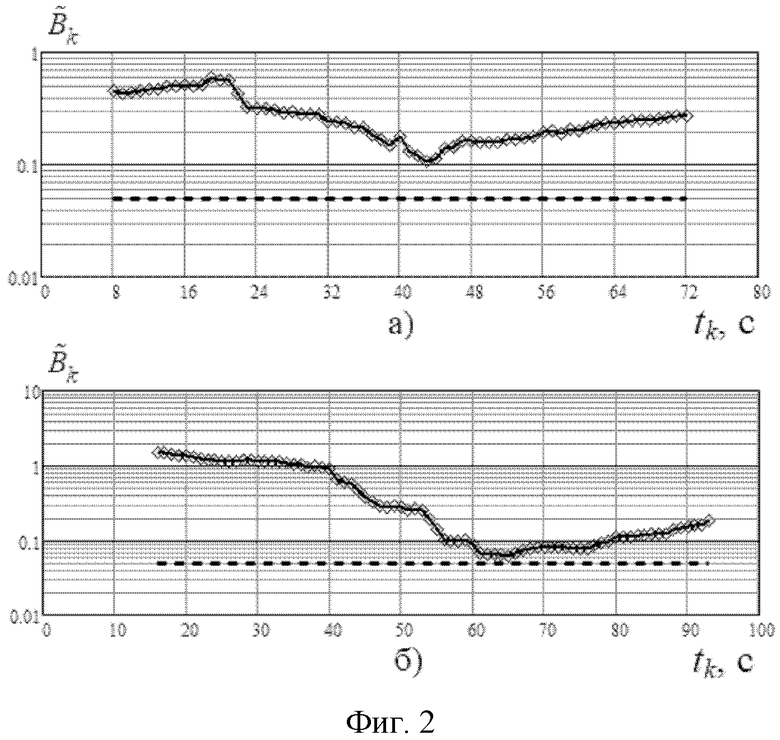
Способ классификации подвижных объектов наземной техники по сейсмическому сигналу, включающий регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, фильтрацию его z-компоненты в выбранной полосе частот, её усиление и дискретизацию, осуществление деления выбранного диапазона рабочих частот на две полосы: низкочастотную и высокочастотную по условию равенства в них спектральных плотностей сейсмофона; в отсутствии объекта в зоне чувствительности сейсмодатчика периодическую оценку средней величины отсчётов энергии сейсмофона в выбранной полосе за время наблюдения сейсмофона, а также значения отсчётов коэффициента выравнивания энергий сейсмофона в этих полосах, как величины обратной отношению усреднённой на промежутке времени наблюдения величины отсчётов энергии сейсмофона низкочастотной полосы к усреднённой на этом же временном промежутке величине отсчётов энергии сейсмофона высокочастотной полосы; в присутствии подвижного объекта наземной техники на длительности текущего временного окна осуществление деления величины отсчётов энергии смеси z-компоненты полезного сейсмосигнала и сейсмофона в низкочастотной полосе на величину отсчётов энергии смеси z-компоненты полезного сейсмосигнала и сейсмофона в высокочастотной полосе, домножения отсчётов полученного частного от деления на последнюю оценку значения отсчётов выравнивающего коэффициента, отличающийся тем, что результат последней текущей операции усредняется на определённом количестве отсчётов, расположенных в малой окрестности точки траверза, результат усреднения сравнивается с единичным порогом; если результат усреднения оказывается расположенным выше единичного порога, то выносится решение о том, что обнаруженный объект относится к классу колёсной техники, если же его величина превысит единичный порог, то обнаруженный объект относится к классу гусеничной техники; одновременно в малой окрестности точки траверза осуществляются операции компенсации пространственных потерь энергии сейсмосигнала и потерь, связанных с затуханием его в почве, определяющие приведение энергии отсчётов сейсмосигнала к состоянию на момент возбуждения сейсмосигнала объектом, пересекающим траверз, операции по оценке величины максимального значения приведённой энергии сейсмосигнала, которая принимается в качестве условного «веса» обнаруженного объекта; отнесение обнаруженного объекта к категории «лёгкий» или «тяжёлый» в своём классе осуществляется путём сравнения величины его условного «веса» с соответствующим статистически обоснованным для данного класса техники порогом; если условный «вес» обнаруженного объекта меньше величины соответствующего порога, то объект относят к категории «лёгкий» в своём классе, если же условный «вес» объекта превышает по величине этот порог, то объект относят к категории «тяжёлый» в этом классе.
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| WO 2010101594 A2, 10.09.2010 | |||
| УСТРОЙСТВО КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2236027C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| US 7796820 B2, 14.09.2010 | |||
| US 4604738 A1, 05.08.1986. | |||
