(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНЫХ СИСТЕМ
Л
цессу удается получить лишь несколько точек характеристики. Чтобы обеспечить возможность точного восстановления характеристики по точкам, приходится процесс повторять несколько раэ с измененными начальными условиями. В случае же слабого демпфирования писсипативная характеристика проходит вблизи оси, и если ее линейную часть можно довольно точно оценить, то нелинейную составляющую точно определить практачески не удается. Таким образом, хотя точки точно располагаюгся на характеристике (если не учитывать погрешностей функционирования схемы), фактическая точность определения нелинейных составляющих характеристик может быть высокой не во iBcex случаях, а лишь при ярко выраженной нелинейности и при оптимальной диссипации системы. Кроме того, при определении характеристик по высокочастотным колебаниям труднее обеспечить достаточное быстродействие схемы управления интенсивностью электро шс го луча, в связи с чем приходится использовать запись временных характеристик в измененном временном масштаг бе, что также вносит некотор)то погрешность и делает невозможным констатирование изменений характеристик в то время, когда они происходят. Л это ограничивает область применения устройства.
Целью настоящего изобретения являеася повышение точноста устройства. Поставленная цель достигается тем, что устройство содержит три сумматора потенциометр, два блока нелинейной функции и датчик возбуждаюшего усилия, выход которого и выходы датчиков ускорения, скорости и перемеш.ения соединены с четырьмя соответствующими входами двухпози1шо1шого переключателя, два других входа которого соединены с выходами датчиков скорости и перемещения соответственно через первый и второй блоки нелинейной функции, первый и второй входы двухпозицио1шого переключателя соединены с соответствующими входами первого сумматора, третий выход - со входом второго сумматора, другой вход которого связан с вьЕходом первого сумматора, че1верТ1:Дй выход двухпозиционного переключателя соединен с первым входом индикатора, второй вход которого подключен к выходу третьего сумматора, один вход
которого связок с выходом второго сумматора, а другой - через потенциомеф с четвер1Ъ(м вь ходом двухпозниионного пе рек л юч а те ля.
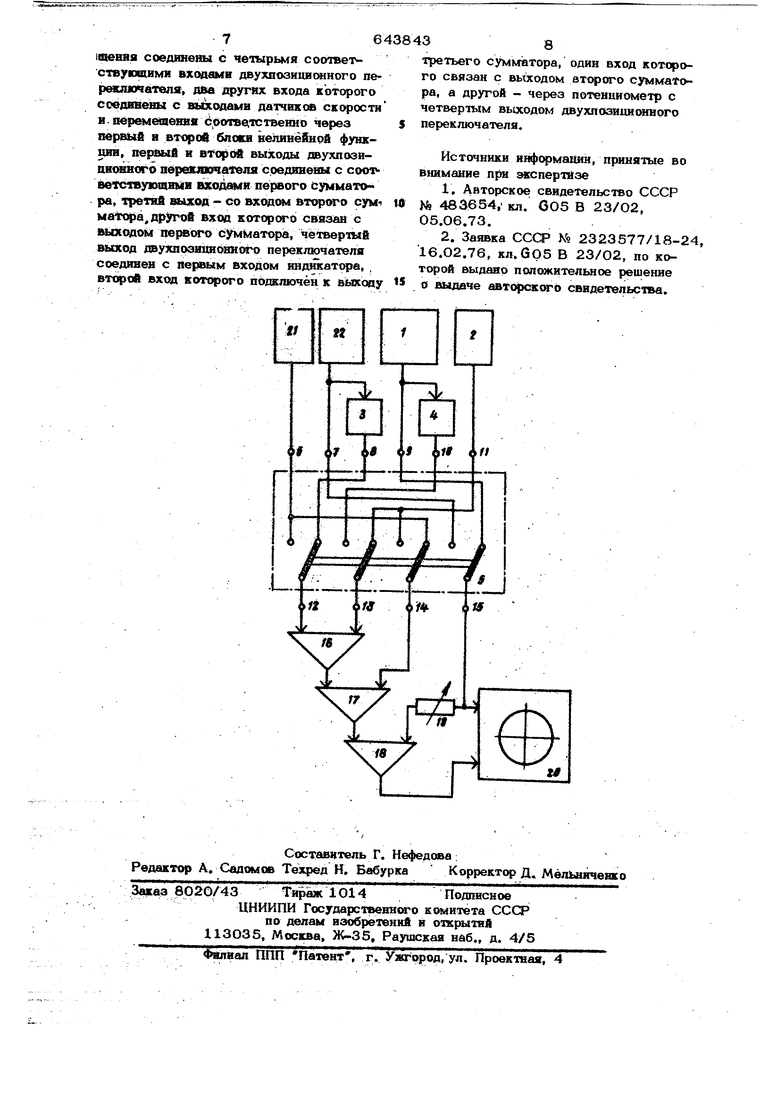
Fia чертеже изображена блок-схема устройства . Сна содер)жит датчик перемещения 1, датчик возбужд,1юшего усилия 2, блоки нелинейной функции 3 и 4 (одной переменной), двухпозиционный переключитель 5, имеющий входы 6-11 и выходы 12-15, cyNiMaTopH 10, 17 и 18, потенциометр (со шкш1ой)19, индикатор (например, катодный осциллограф) 20, датчик ускорения 21 и датчик скорости 22,
Устройство работает по принципу последовательного приближения. Сначала приближенно определяеи-ся потенциальная характеристика, для чего задается и устанавливается на блоке нелинейной функции 3 линейная диссипативная характеристика с коэффициентом направления t f , где и «и соответственно амплитуда гармонической возбуждающей силы, амплитуда и частота резонансного колебания системы описываемой нелинейным дифференциальным управлением вида
тх -ьК(х) 1-Р(х) Е&1Псл)1
Двухпозиционный переключатель 5 ставится в правое положение, обеспечивая тем самым поступление на входы
сумматора 16 сигналов, пропорциональных возбуждающей и линеаризованной демпфирующей силам. Сигнал, пропорциональный сумме этих сил (равный нулю, если диссипативная характеристика дейст
вительно линейна), поступает на первый . вход .сумматора 17, на второй вход которого подается сигнал, пропорциональный инерционной силе wX .На выходе сумматора 17 получается сигнал,
пропорциональный восстанавливающей силе (с некоторой погрещностью, если действительная диссипативная характеристика не, является линейной). Эгот сигнал подается на первый вход с матора 18, на второй вход которого через потенциометр со щкалой 19, поступает сигнал, п|: опорциональный смешению X , который, минуя потенциометр 19, поступает также на развертку по
горизонтали катодного осциллографа 2О на другую развертку которого подается выходной сигнал сумматора 1,8- Рукоят ка потенииомеара 19 устанавливается в такое положение, чтоб) петлеобрааная кривая на экране катодного осциллографа 20 сжалась, и изображающая точка проходила через начало координат прн движении в обоих направлениях При этом масштаб развертки по вертакали изменяе1ся до такой 1величины, чтобы кривая располагалась на значительной части экрана по высоте и отче ливо выявилась ее форма. Эта кривая пропорциональна нелинейной составляющей характеристики F(xl , а положение р тсоятки потенциометра пропорционально коэффициенту направления ее линейной чж;ти. Если желательно получить характеристику Р(к) с большей точностью, то весь процесс повторяется после определения указанным ниже способом характеристики R() и набора ее н блоке нелинейной функции 3. Для определения характеристики R(x двухпозициониый переключатель 5 ставится в левое положение, на блоке нелинейной функции набирае1ся уже определенная характеристикаР(х)и на экране осциллографа 20 получается нелинейная составляющая характеристики R(t), а положение рукоятки потенциометра 19, при котором кривая на экране проходит через начало координат (или ссяасем исчезает), соответствует коэффициенту направления ее линейной части. Так происходит потому, что при левом положении двухпозиционного переключателя 5 на входь су тматора 16 поступают сигналы, пропорциональные ине ционной и восстанавливающей силам, а на его выходе образуется сигнал, пропорциональный сумме этих сил ив то же время сумме R( х)- -Esin «J-t если на блоке 4 набрана фу1шция Р(к) , полученная во время предыдущего этапа, когда переключатель был установлен в правое положение (погрешность зависит от погрешностей определения и набора потенциальной характеристики). Для выделения диссипативной силы выходной сигнал сумматора 16 подае-хся на первь й вход сумматора 1 7, на второй вход которого поступает сигнал, пропорциональный возбуждающему усилию. Выходной сигнал сумматора 17 после суммирования его в третьем сумматоре 18 с подаваемым через потенциометр со . шкалой 19 сигналом, пропорциональным скорости колебательного движения, становичхгя аропорциональным нелинейной составляющей демпфирующей силы и по436дается на вертикальную развертку к./ тОдного осциллогоафа 2О, на горизонтальную развертку которого поступает сигнал, пропорциональный скорости. В случае необходимости получения ха рак терне так с особой точностью цикл П(жторяе1сй несколько раз до тех пор, пока характеристики будут совпадать с полученными во время предыдущего цикла. Однако в большинстве случаев достаточно осуществления одного цикла. Получение на жране изображения только нелинейной части характеристики способствует определеншо ее с высокой точностью путем сильного увеличения по вертикали. Использование этого устройства дает возможность получить характеристики восстанавливающей и демпфирующей сил с теоретически неограниченной точностью в виде коэффициента направления линейной части характеристики и постоянно возобндаляюшегося за время каждого попупериода колебания графика ее нелинейной составляющей на экране индикатора. Устройство может быть использовано для определения характеристик по затухающим колебаниям, В таком случае сигнал Eein , а нелинейная составляющая на экране осциллографа получается в виде отрезка кривой в убывающем с обоих концов интервале изменения переменной х или i: . Устройство может быть использовано и для определения характеристик сложных систем, относящихся к нормальным фOlJмaм колебания по временным характеристикам такого колебания вдоль какой-либо обобщенной координаты. Таким образом изобретение дает как технический, так и экономический эффект. Формула изобретения Устройство для определения динамических характеристик колебательных систем, содержащее датчики перемещения, скорости и ускорения индикатор к двухпозиционный переключатель, от- личающееся тем, что, с цеью повышения точности, оно содержит три сумматора, потенциометр, два блока нелинейкой функции и датчик возбуждающего усилия, выход которого и ВЬ1ХОДЫ датчиков ускорения, скорости и персме