(54) ЭКСКАВАТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ПРОХОДЧЕСКО-ДОБЫЧНОЙ КОМБАЙН ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103507C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БУЛЬДОЗЕР ЭКСКАВАТОРНЫЙ | 2009 |
|
RU2394964C1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1996 |
|
RU2095521C1 |
| УСТРОЙСТВО ДЛЯ ОТРАБОТКИ ОТКОСОВ УСТУПОВ | 2016 |
|
RU2618806C1 |
| Способ разработки сложноструктурных месторождений твердых полезных ископаемых | 2019 |
|
RU2715498C1 |
| Одноковшовый экскаватор | 1987 |
|
SU1441028A1 |
| Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых | 2018 |
|
RU2687719C1 |
| КАРЬЕРНЫЙ ЭКСКАВАТОР | 2005 |
|
RU2296860C1 |
| СПОСОБ РАЗРАБОТКИ МЕСТОРОЖДЕНИЯ ЯНТАРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2011828C1 |
| СПОСОБ РАЗРАБОТКИ КРУТЫХ УГОЛЬНЫХ ПЛАСТОВ | 2013 |
|
RU2540722C1 |
Изобретение относится к машинам для разработки грунтов и горных пород в частности, к экскаваторам.
Известен экскаватор, содержащий транспортное средство с закрепленным на нем рабочим органом, связалшым посредством тяг с вибратором, который установлен на платформе транспортного средства, а также гидродилиндр регулировки угла наклона транспортного средства fl .
Наиболее близким техническим решением к изобретению по сущности, и достигаемвму эффекту является экскаватор содержащий ходовую часть и подвижно связанную с ней посредством подъемников платформу, на которой смонтирован имеющий режущие и транспортирующие элементы рабочий орган, связанный с платформой посредством стрелы и средства регулировки угла е:го наклона, например, гидроцилиндра и виброгасителей 2 .
Однако такой экскаватор не предназначен для селективной разработки пластовых месторождений, поскольку рабочий орган Б нем обеспечивает лишь передачу одного усилия на разрабатываемый 5 забой, в частности усилия резания, и не обеспечивает скол пластов.
Применительно к разработке пластовых месторождений известный экскаватор не может обеспечить требуемого 0 качества добьшаемого сырья.
Цель изобретения - повышение качества добьшаемого сырья при селективной разработке пластовых месторождений путем создания на пластах верти5 калькой разрушающей нагрузки, одновременного скола разрушенных пластов и их перемещения,
Для достижения цели режущие элементы вьтолнены в виде с зубья0 ми, между которыми установлены транспортирующие элемент1 г в виде перемычок, связанных концами с цепями рабочего органа, при этом между виброгасиелями и рабочим органом, а также на рабочем органе установлены пульсаоры.
Указанная цель достигается, также тем, что рабочая поверхность каждого катка выполнена с V -образными канавками по периметру.
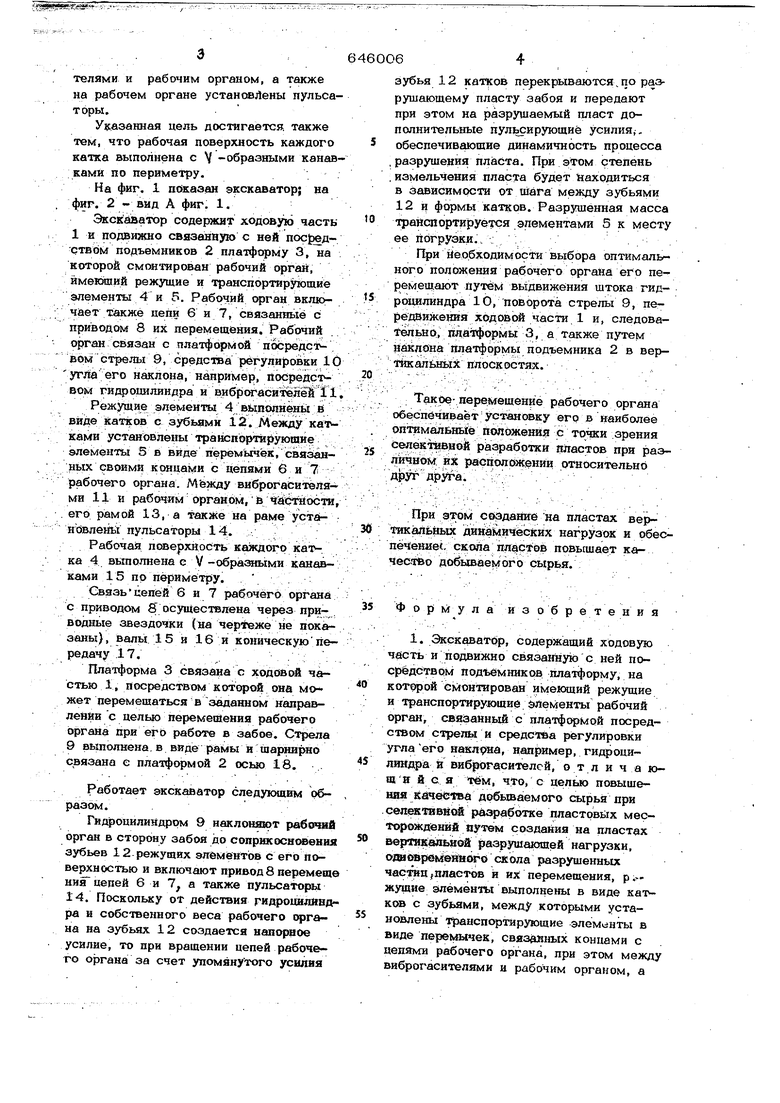
На фиг. 1 показан экскаватор; на фиг. 2 - вид А фиг. 1.
Экскйватор содержит ходовую часть 1 н подвижно связанвую с ней пос юдтвом подъемников 2 платформу 3, на . оторой смсштирован рабочий орган, мекший режущие и транспортирующие элементы 4 и 5. Рабочий орган вклюает также цепи 6 и 7, связанные с риводом 8 их перемещения. Рабочий орган связан с платформой пбсредс)вом стрелы 9, средства регулировки 10 угла его наклона, например, посредст воы гидроцилиндра и виб1рогаситейей X1,
Режущие элементы 4 вып«злн ны В виде катков с 12. Между кат ками установлены траиспортируювяие элементы 5 в виде перемычек, свяа1анрых своими концами с цепами 6 и 7 рабочего органа. Между виброгасителя- ми 11 и рабочим органом, в , его рамой 13, а такЖе на раме VcTaнйвленьг пульсаторы 14.
Рабочая поверхиость каждого 4 выполнена с V -образяыми канавками 15 по периметру.
ЧЗвязьцепёй 6 и 7 рабочего органа с приводом 8 осуществлена через приводные звеэаочки (на не показаны), валы 15 и 16 и коническую передачу .17.. - :
Платформа 3 связана с ходовой частью I, посредством котсфой она Mt жет перемешаться в заданном направлении с целью перемещения рабочего органа при его работе в забое. Стрела 9 выполнена. в виде рамы и шарнярно связана е платформой 2 осью 18.
Работает экскаватор следующем об- , разом.
Гид роцилиндррм 9 наклоняют рабочий орган в сторону забоя до соприкосжхвевия зубьев 12-режущих элем1внтов с его поверхностью и включают привод 8 перемеше ния цепей 6 и 7 а также пульсаторы 14. Поскольку от действия ридроиилйнд ра н собственного веса рабочего органа на 3y6bsix 12 создается напорное усилие, то при вращении цепей рабочего органа за счет упомянутого усилия
646006
зубья 12 катков перекрываются, по разрушающему пласту забоя и передают при этом на разрушаемый пласт дополнительные пульсирующие усилия;, обеспечивающие динамичность процесса , разрушения пласта. При этом степень . измельчения пласта будет находиться в зависимости от шага между зубьями 12 и формы катков. Разрушенная масса транспортируется элементами 5 к месту ее погрузки.,. :
При йео.бходимосТи выбора оптимального положения рабочего органа его перемещают путём вьвдвижения штока гидроцилиндра Ю, поворота стрелы 9, передвижедая ходовой части 1 и, следовательно, пда рформы 3, а также путем иаклона платформы подъемника 2 в верт жалЬнь плоскостях. .
Такое- перемещение рабочего органа обеспечивает установку его в наиболее оптимальные положения с точки зрения селективной разработки пластов при различном их расположении относительно друг друга.
При этом сбэдание на пластах вер3d пясальных динамических нагрузок и обеспеченнее скола пластов повышает качесггво добываемого сырья.
35 Ф о р1 м у л а и 3 об р
е т е н и я
