Техническое решение относится к горному делу, а именно к устройствам для экскавации и перемещения горной массы, и может быть использовано для селективной открытой добычи полезных ископаемых без их предварительного рыхления из сложноструктурных залежей горизонтального или пологого падения.
Известен карьерный экскаватор (см. авт. св. СССР №302453, кл. Е 02 F 7/02, опубл. в БИ №15, 1971 г.), включающий ходовой механизм, приемный, передаточный и отвальный конвейеры и рабочий орган, выполненный в виде шарнирно закрепленного на стреле пустотелого клина, в полость которого встроен транспортирующий механизм, например пластинчатый конвейер.
Недостатком известного экскаватора является то, что рабочий орган, выполненный в виде пустотелого клина, даже не оснащенного статическими зубьями, имеет внушительные размеры и поэтому, чтобы создать на его рабочей кромке удельные усилия, достаточные для внедрения в горный массив, необходимо иметь большие мощности и массу машины, а это снижает такие технические показатели карьерного экскаватора, как производительность и удельную энергоемкость разрушения. К тому же, ступенчатая траектория движения рабочего органа, получаемая в результате действия на него больших реактивных сил забоя, вызывает разубоживание добытого полезного ископаемого и его потери.
Наиболее близким по технической сущности и совокупности существенных признаков является карьерный экскаватор (см. авт. св. СССР №1099019, кл. Е 02 F 7/02, опубл. в БИ №23, 1984 г.), включающий ходовое оборудование, поворотную платформу, телескопическую стрелу, на конце которой смонтирован корпус погрузчика со встроенным конвейером, рабочий орган непрерывного действия, шарнирно связанный с корпусом погрузчика через узел соединения, приемный конвейер и гидроцилиндры управления. Корпус погрузчика на телескопической стреле закреплен жестко, а узел соединения рабочего органа непрерывного действия с корпусом погрузчика выполнен в виде поворотного двуплечего рычага, заднее плечо которого шарнирно связано посредством дополнительного гидроцилиндра управления с корпусом погрузчика, а переднее - с рабочим органом непрерывного действия с возможностью его перемещения в вертикальной плоскости с выдвижением вперед относительно корпуса погрузчика.
Рабочий орган этого экскаватора, выполненный в виде ротора, оснащенного гребками, совершает с помощью поворотного двуплечего рычага и гидроцилиндра управления ограниченные периодические движения колебательного характера в вертикальной плоскости. Такая конструкция рабочего органа не эффективна при разрушении горных пород, а способна лишь вести разборку и погрузку предварительно хорошо разрыхленной горной массы. Поэтому применение известного карьерного экскаватора в селективной технологии, где требуется послойное отделение горной породы от руды, сопряжено с большими потерями и разубоживанием полезного ископаемого.
Техническая задача предлагаемого решения заключается в повышении эффективности открытой добычи полезных ископаемых за счет применения безвзрывной технологии и обеспечения селективной выемки полезного ископаемого, снижающей его потери и разубоживание.
Поставленная задача решается тем, что карьерный экскаватор, включающий ходовой механизм, стрелу с приемным конвейером, передаточный и отвальный конвейеры, рабочий орган и гидроцилиндры управления - напорные, поворотные и подъема стрелы, согласно техническому решению снабжен кронштейном-ползуном, соединенным с напорными и поворотными гидроцилиндрами с возможностью перемещения по направляющим на корпусах напорных гидроцилиндров, рамой, соединяющей корпусы напорных гидроцилиндров, шарнирно закрепленные на головной части стрелы, и телескопическим приемным конвейером. Рабочий орган шарнирно присоединен к кронштейну-ползуну и выполнен в виде совковой лопаты без задней стенки с рабочей кромкой, оснащенной ударными и статическими зубьями, а телескопический приемный конвейер расположен между головной частью стрелы и рабочим органом.
Наличие кронштейна-ползуна, с помощью которого рабочий орган присоединен к головной части стрелы, и напорных гидроцилиндров с направляющими обеспечивает прямолинейное перемещение рабочего органа и, как следствие, послойное отделение горной породы от полезного ископаемого, позволяющего вести селективную выемку, снижающую потери полезного ископаемого и его разубоживание. Рабочий орган, выполненный в виде совковой лопаты, имеющей выступающую переднюю часть с рабочей кромкой, позволяет увеличить удельное усилие внедрения, а также исключить контакт боковых ее стенок с горной породой в начальный период внедрения, что способствует снижению лобового сопротивления. Отсутствие задней стенки у совковой лопаты снижает сопротивление перемещению разрушенной горной породы на приемный конвейер. Оснащение рабочей кромки совковой лопаты ударными и статическими зубьями позволяет осуществлять разрушение горной породы без предварительного буровзрывного рыхления.
Поскольку погрузка горной породы осуществляется одновременно с процессом ее разрушения и расстояние между головной частью стрелы и рабочим органом увеличивается, между головной частью стрелы и рабочим органом установлен телескопический приемный конвейер.
Таким образом, применение предлагаемого технического решения исключает буровзрывные работы и обеспечивает селективную выемку полезного ископаемого, снижающую его потери и разубоживание, повышая эффективность процесса разрушения горных пород и производительность экскаватора.
Целесообразно телескопический приемный конвейер выполнить в виде двух вибролент, одна из которых закреплена на указанной раме, а другая - на кронштейне-ползуне. Такое исполнение приемного конвейера отличается простотой конструкции (вибролента представляет собой стальной лист с присоединенным к нему вибратором), компактностью и надежностью в работе.
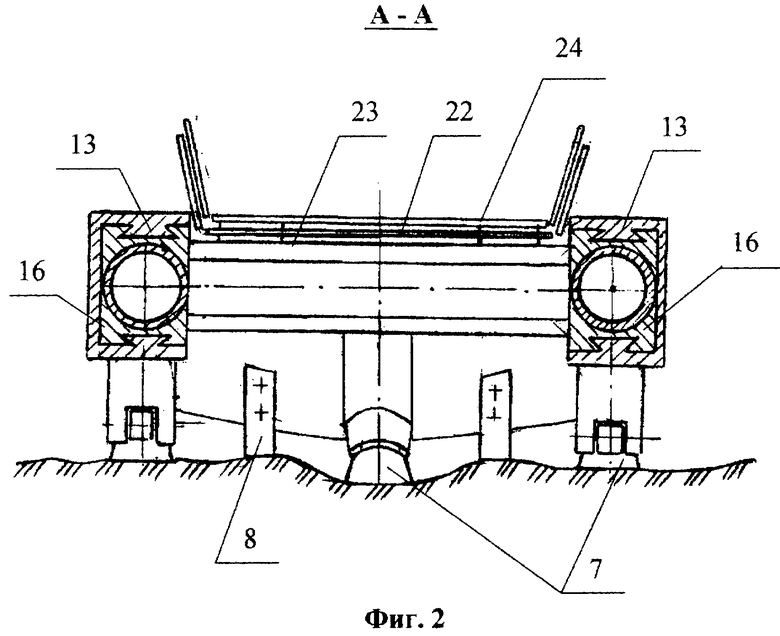
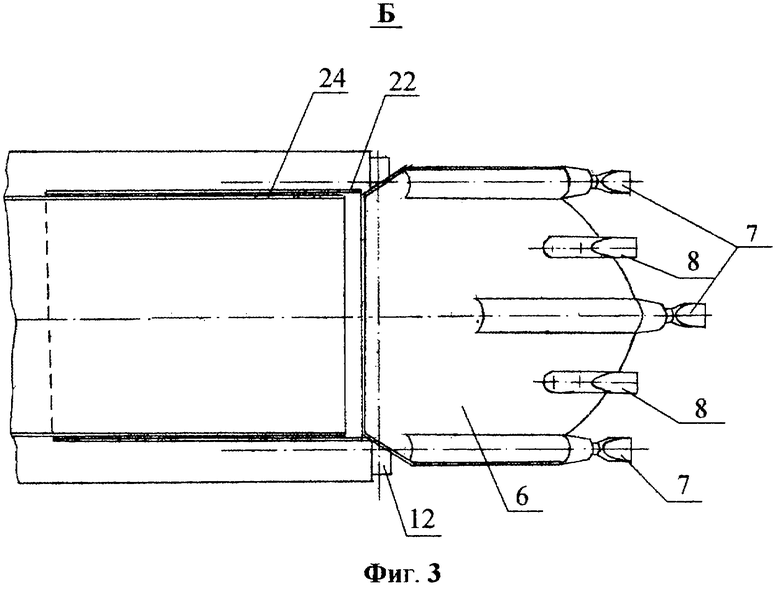
Сущность технического решения иллюстрируется примером конкретного исполнения и чертежами, где на фиг.1 изображен общий вид карьерного экскаватора, пунктирной линией показано максимально возможное верхнее расположение рабочего органа; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - вид Б на фиг.1.
Карьерный экскаватор (далее - экскаватор) содержит ходовой механизм 1 (фиг.1), стрелу 2 с приемным конвейером (поз. не обозначен), передаточный конвейер 3, бункер 4, отвальный конвейер 5, рабочий орган 6, выполненный в виде совковой лопаты без задней стенки с рабочей кромкой, оснащенной ударными 7 и статическими 8 зубьями (фиг.2, 3). Рабочий орган 6 с помощью шарниров 9, 10, поворотных гидроцилиндров 11 и шарнира 12 прикреплен к кронштейну-ползуну 13. К нему же с помощью шарниров 14 прикреплены напорные гидроцилиндры 15. Корпусы 16 напорных гидроцилиндров 15 имеют направляющие, например, в виде «ласточкиного хвоста» (фиг.2), по которым перемещается кронштейн-ползун 13. Напорные гидроцилиндры 15 с помощью шарниров 17, поворотных гидроцилиндров 18 и шарниров 19, 20 присоединены к головной части стрелы 2, которая соединена с гидроцилиндром 21 для перемещения ее в вертикальной плоскости.
Между стрелой 2 и рабочим органом 6 установлен телескопический приемный конвейер (поз. не обозначен), выполненный в виде двух вибролент: вибролента 22 (фиг.2) закреплена на раме 23, соединяющей корпусы 16 напорных гидроцилиндров 15, а вибролента 24 - на кронштейне-ползуне 13.
Экскаватор работает следующим образом.
Разработка забоя ведется слоями в нисходящем порядке. При подходе экскаватора к забою стрела 2 с помощью гидроцилиндра 21 поднимается на максимально возможную высоту, напорные гидроцилиндры 15 устанавливаются параллельно вынимаемому пласту. Рабочий орган 6 с помощью поворотных гидроцилиндров 11 устанавливается у забоя таким образом, чтобы оси ударных 7 и статических 8 зубьев образовывали с плоскостью их перемещения угол атаки, близкий по значению к 25÷30°, а режущие кромки этих зубьев 7, 8 касались забоя на расстоянии от свободной поверхности, равном толщине снимаемой стружки. Далее включаются в работу напорные гидроцилиндры 15, которые внедряют совковую лопату, оснащенную ударными 7 и статическими 8 зубьями, в забой, начинается процесс разрушения горного массива. Под действием горизонтального усилия напорных гидроцилиндров 15 горная порода перемещается по наклонной передней стенке лопаты, последовательно поступает на виброленты 22, 24 телескопического приемного конвейера и далее на приемный конвейер стрелы 2, передаточный конвейер 3, в бункер 4 и, наконец, на отвальный конвейер 5.
Рабочий орган 6 совершает рабочий и холостой ход, равный величине хода напорных гидроцилиндров 15. После завершения холостого хода с помощью поворотных гидроцилиндров 11 рабочий орган 6 поворачивается, и оставшаяся в нем горная порода высыпается на виброленту 24. Далее рабочий орган 6 устанавливается в исходное положение для разработки следующего слоя.
Поворотом рабочего оборудования экскаватора в плане обеспечивается отработка слоя горной породы (горизонтального или наклонного) на всю ширину заходки. После завершения отработки одного слоя приводят рабочее оборудование экскаватора в исходное положение, опускают посредством гидроцилиндра 21 стрелу 2, приступают к отработке нижележащего слоя и т.д., до основания забоя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых | 2018 |
|
RU2687719C1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| КАРЬЕРНЫЙ ЭКСКАВАТОР | 1971 |
|
SU302453A1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1979 |
|
SU897967A1 |
| Землеройная машина | 1988 |
|
SU1617101A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2380487C1 |
| Карьерный агрегат для селективной выемки полезных ископаемых | 1982 |
|
SU1076548A1 |
| Рабочее оборудование экскаватора | 1990 |
|
SU1756467A1 |
| РАБОЧИЙ ОРГАН КАРЬЕРНОГО ЭКСКАВАТОРА | 2007 |
|
RU2344239C1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
Изобретение относится к горному делу, а именно к устройствам для экскавации и перемещения горной массы, и может быть использовано для селективной открытой добычи полезных ископаемых без их предварительного рыхления из сложноструктурных залежей горизонтального и пологого падения. Техническая задача - повышение эффективности открытой добычи полезных ископаемых за счет применения безвзрывной технологии и обеспечения селективной выемки полезного ископаемого, снижающей его потери и разубоживание. Экскаватор включает ходовой механизм, стрелу с приемным конвейером, передаточный и отвальный конвейеры, рабочий орган, гидроцилиндры управления - напорные, поворотные и подъема стрелы, кронштейн-ползун, соединенный с напорными и поворотными гидроцилиндрами с возможностью перемещения по направляющим на корпусах напорных гидроцилиндров, раму, соединяющую корпусы напорных гидроцилиндров, шарнирно закрепленные на головной части стрелы, и телескопический приемный конвейер, расположенный между головной частью стрелы и рабочим органом. Последний шарнирно присоединен к кронштейну-ползуну и выполнен в виде совковой лопаты без задней стенки с рабочей кромкой, оснащенной ударными и статическими зубьями. 1 з.п. ф-лы, 3 ил.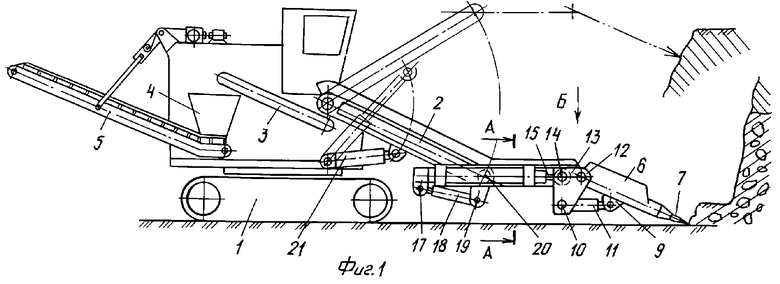
| Карьерный экскаватор | 1982 |
|
SU1099019A1 |
| КАРЬЕРНЫЙ ЭКСКАВАТОР | 0 |
|
SU302453A1 |
| ЭКСКАВАТОР для РАЗРАБОТКИ СКАЛЬНЫХ ПОРОД | 0 |
|
SU324346A1 |
| Экскаватор карьерный | 1978 |
|
SU767297A1 |
| Карьерный агрегат для селективной выемки полезных ископаемых | 1982 |
|
SU1076548A1 |
| US 5857274 А, 01.12.1999. | |||

