Изобретение относится к области автоматического управления процессами в термоядерных установках и может быть использовано при подавлении различных плазменных неустойчивостей в частности, при подавлении желобкоБой неустойчивости плазмы в термоядерных ловушках с магнитными пробками.. Известны способы подавления плазменных неустойчивостей внешней обра.тной связью с постоянными параметрами. Например, в термоядерных ловуш ках с магнитными пробками для подавления желобковой неустойчивости, воз никающей вследствие разделения зарядов на поверхности плазмы при азимутальном дрейфе ионов и электронов в неоднородном магнитном поле, приме няются электростатические системы обратной связи . Теоретические и экспериментальные исследования показали, что в пространстве параметров системы обратно связи существуют области, в которых плотность Плазмы може± достигать мак симальных значений. Поскольку пара-, метры плазмы нестационарны и изменяются заранее неизвестным образом, то известные способы подавления плаз менных неустойчивостей посредством .систем, обратной связи с постоянными параметрами не могут обеспечить слежение за этими областями в процессе накопления плазмы и, как следствие, не могут обеспечить максимально возможный запас устойчивости. Известен способ стабилизации плазмы, при котором регистрируют приращение плотности плазмы и воздействуют на плазму системой внешней обратной связи, параметры которой изменяют путемВоздействия многоканальным ав- томатическим оптимизатором 2J . Однако этот способ применим только в случае относительно медленного процесса расхождения неустойчивых колебаний плазмы, когда инкремент составляет несколько процентов от частсэты (как, например, при стабилизации ионно-циклотронной неустойчивости). Причем для формирования показателя устойчивости плазмы в известном способе необходимо определение инкремента (или декремента) расходящихся (или сходящихся) колебаний. Если колебания расходятся достаточно быстро, когда инкремент их сравним с частотой (как, например, при желобковой неустойчивости) , то формирование показателя
стойчивоети согласноизвестному спообу не представляется возможным, ак как колебания расходятся за врея, сравнимое с временем определения инкремента.
Кроме того, в силу организации оисковых воздействий автоматического оптимизатора по известному способу на основе реакции декремента высокочастотных колебаний плазмы, необходимо управление параметрами cHCTeNttJобратной связи также вести на достаточно высокой частоте. Это создает принципиальные трудности при аппаратурной реализации известного способа.
Цель предлагаемого изобретения автоматический поиск и поддержание параметров системы обратной связи.
Для этого, направление изменения параметров системы обратной связи формируют в зависимости от знака пoлyчae 1ыx приращений плотности плазмы в процессе ее накопления. В режиме, ограничения плотности без сбросов параметры систег-1ы обратной связи изменяют с частотой внешнего воздействия оптимизатора.
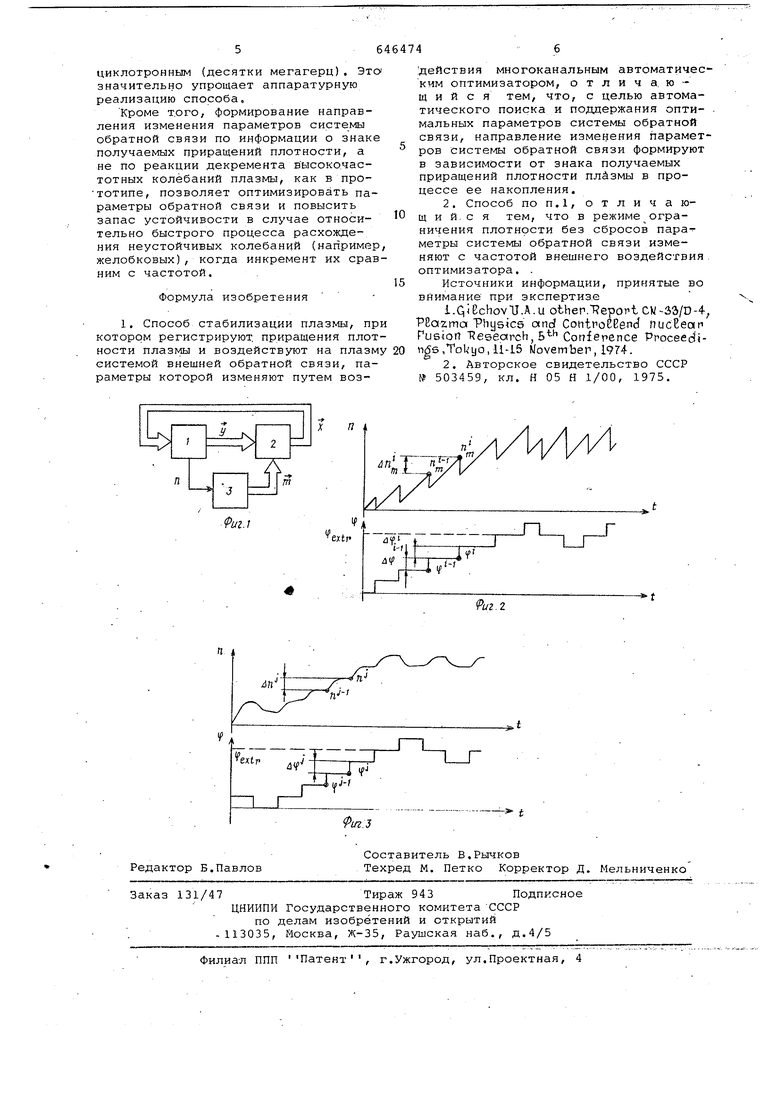
На фиг. 1 иаображена блок-схема объекта (плазмы) и системы управления; на-фиг. 2 представлен процесс поиска максимума максимальных значений плотности; на фиг.. 3 изображен процесс поиска максимальн.ых значений плотности в режиме ограничения плотности без сбросов.
При охватывании объекта 1 обратной связью (фиг.1) вектор выходных сигH.ajiOB электростатических датчиков п.отенциала преобразуется системой обратной связи 2 и подается в виде вектора входных воздействий jc на управляющие электроды. Автоматический оптимизатор3, получая информацию с датчика плотности , формирует направление изменения -вектора параметров m системы 2 обратной связи в . зависимости от знака плучаемых приращений плотности п.
При подавлении, например, жалобковой неустойчивости плотность ограничивается при появлении потерь плазмы вследствие возникновения неустойчивых колебаний. В одних случаях возникают режимы ограничения плотности со сбросами, в других (например, при изменения, вакуумных условий) - режимы ограничения плотности без сбросов. В перв ом Ьлучае максимальные значения плотности определяются, параметрами обратной-связи. При достижении этик значений замкнутая система .плазма+ обратная связь выходит на границу устойчивости, что приводит к потерям плазмы и сбросу плотности. Процесс поиска максимума максимальных значений плотности согласно предлагаемому способу для простоты иллюстоируются по одному управляемому параметру, например, пространственному фазовому сдвигу Ф (фиг.2). При выходе на границу устойчивости фиксируют и запоминают максимальное значение плотности (где i - номер максимума плотности). Затем производят сравнение с предыдущим запомненным максимумом плотности П . и определяют зна.к разности ДП . Если дп О, то направление изменения Ф оставляют прежним, то есть делают шаг Дф в ту же сторону, что и предыдущий Еслидп г, - О, то изменяют направление шагов по tf на противоположное, то есть делают шаг в другую сторону по отношению к предыдущему шагу. Частота изменения управляемого параметра определяется частотой сбросов плотности и не является регулярной величино{1. Таким образом, в результате рассмотренного формирования направления шагов по управляемому параметру находится максимум максимальных значений плотност
В режиме ограничения плотности бе сбросов от внешнего генератора автоматического, оптимизатора задается потоянная частота изменения управляемого параметра (фиг.З), В тактовые интервалы времени, задаваемые этим генератором, определяют и запоминают дост.игнутое значение плотности П (где j - номер .тактового интервала времени).Затем производят сравнение с запомненным значениемплотностип в предыдущий тактовый интервал времен.и и .определяют знак . разности
3-1
J
Если ДИ о, то наЛ п правление изменения tf в тактовый интервал времени сохраняют, а если, д П -i О, то направление шагов дcf изменяют на противоположное.
В общем случае поиска экстремума плотности по многим переменным формируют направление изменения вектора параметров fn в зависимости от знака Дл (или дп. ) по одному из многокоординатных шаговых методов поиска с совмещенными пробными и рабочими шагами.
Поскольку положение и величина экстремальных значений плотности зависят от изменяющихся неизвестным образом параМетров плазмы, то предлагаемый способ позволяет находить И поддерживать оптимальные значения параметров системы обратной связи, со.ответствующие максимально возможному запасу устойчивости в процессе накопления плазмы.
При этом поиск оптимальных параметров системы обратной связи согласно предлагаемому способу ведется н,а частоте релаксационных колебаний плотности плазмы (десятки герц), а не на частотах,близких, например, к }калобковым (десятки килогерц) или
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации неустойчивостей плазмы | 1976 |
|
SU598524A1 |
| Устройство для стабилизации плазмы | 1976 |
|
SU660474A1 |
| Способ стабилизации резистивной винтовой неустойчивости плазмы | 1987 |
|
SU1501311A1 |
| РЕЛЯТИВИСТСКИЙ СВЧ-ПРИБОР КОГЕРЕНТНОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1988 |
|
SU1595265A1 |
| Способ магнитного удержания термоядерной плазмы в замкнутой ловушке | 1987 |
|
SU1518830A2 |
| ИСТОЧНИК ПУЧКА ИОНОВ НА ОСНОВЕ ПЛАЗМЫ ЭЛЕКТРОННО-ЦИКЛОТРОННОГО РЕЗОНАНСНОГО РАЗРЯДА, УДЕРЖИВАЕМОЙ В ОТКРЫТОЙ МАГНИТНОЙ ЛОВУШКЕ | 2016 |
|
RU2650876C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ МЕЛЬНИЦЫ САМОИЗМЕЛЬЧЕНИЯ | 2008 |
|
RU2375116C1 |
| СИСТЕМА УПРАВЛЕНИЯ НЕУСТОЙЧИВОСТЬЮ ВНУТРЕННЕГО СРЫВА ПЛАЗМЫ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ В УСТАНОВКАХ ТИПА ТОКАМАК | 2017 |
|
RU2668231C1 |
| Способ подавления тиринг-неустойчивости в плазме токамака | 1988 |
|
SU1536447A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
