1
Изобретение относится к области электропривода и может быть использовано при разработке двигателей для автоматических систем, а также в приводах с повышенной равномерностью вращения выходного вала.
Известен вентильный электродвигатель (БД), содержащий трехсекционную якорную обмотку, подключенную к выходу полупроводникового коммутатора, управляемого по сигналам однофазной обмотки
датчика положения ротора (ДПР) через пусковой генератор и фазорасщепитель, с числом пар полюсов Р, обеспечивающий несинусоидальное распределение индукции в зазоре, например, с содержанием
.-третьей гармоники, причем однофазная обмотка датчика положения ротора выполнена с числом пар полюсов 3 Р и размещена на: общем магнитопроводе с якорной обмоткой. |1.
Основным недостатком известного двигателя является неравномерность вращения его вала, вызванная дискретностью перемещения магнитного поля в электрической машине.
Известен также бесконтактный элект родвигатель постоянного тока, содержащий
бесконтактную электрическую машину магнитоэлектрического типа, обмотки которой подключень к выходам полупроводникового коммутатора, работающего в режиме широтноимпульсной модуляции, входы которого соединены с выходами чувствительных элел1ентов щиротно-импульсйого ДПР, например, магнитно-модуляционного тИпа 2.
Недостатком этого электродвигателя является большое число токоподводов, соединяюших ДПР и полупроводниковый коммутатор, равное 2 N, где N - число секций двигателя.
Настоящее изобретение позволяет уменьшить число токоподводОв.
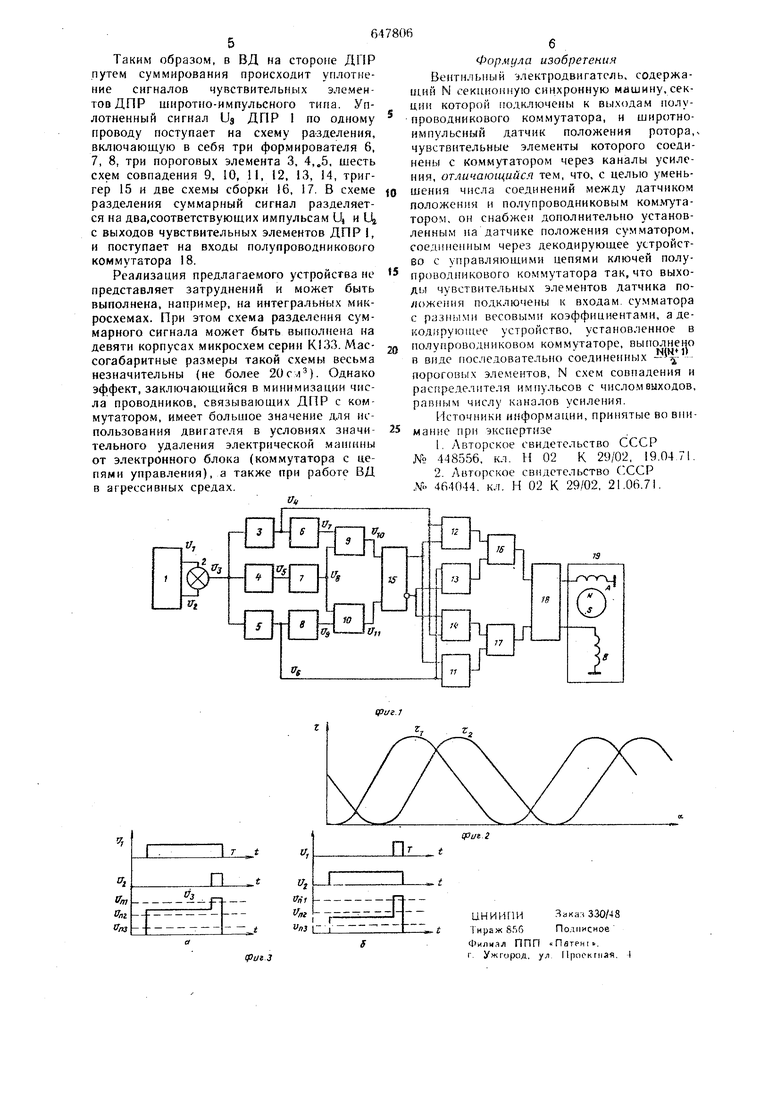
Цель изобретения достигается тем, что в N секционном ВД с позицнонно-зависимой модуляцией фазных напряжений датчик положения ротора оснащается устройством уплотнения сигналов. Например сумматором, в полупроводниковом коммутаторе устанавливается декодирующее устройство, выполненное в виде N(N + l)/2 пороговых элементов, соединенных через N. севпадения и распр еделитель с N выходами. Вь)х6дьт распределителя импульсов соединены-с входами усилителей мощности полупроводникового коммутатора. Сущность изобретения поясняется черт.ежами.: . Схема ВД, реализованная для дзухфазного варианта датчика положения ротора, изображена на фиг. I; на фиг. 2 даны Эпюры относительной длительности импульсов датчика положения ротора; на фиг. 3 - фор-мирование импульсов сумматора датчика положения. Вентильный электродвигатель состоит из двухфазного широтно-импульсного датчика положения ротора (ДПР) 1, выходы чувствительных элементов которого подключены ко входам встроенного в датчик положения пассивного сумматора 2, выход которого подключен ко входам пороговых элементов3, 4, 5, соединег1ных последовательно с формирователя и импульсов б, 7, 8; шести двухвходовых схем совпадения 9, 10, -11,12, 13, 14, триггера 15, двух двухвходовых схем сборки (схем ИЛИ) 16, 17, полупроводникоюго коммутатора 18, к выходам которого подсоединены обмотки двухфазной бесконтактной электрической машины 19 магнитоэлектрического типа. Выход второго формирователя 7 подключей к первым входам схем совпадения 9, 10, на вторые входы которых подключены выходы первого 6 и третьего 8 формировдтелей соответственно. Выходы схем совпадения 9 н 10 соединены с установочными входами триггера 15, выходы которого подключены к первым входам третьей И и шестой 14, четвертой 12 и пятой 13 схем совпадения. Ко вторым входам схем совпадения 12 и 14 подключен вь1ход первого порогового . элемента 3, вторые входы схем совпал,ения 1,1 и 13 соединены с выходом третьего порогового элемента 5. Выходы схем совпадения 12 и 13 через первую схему сборки 16 подключены к входу полупроводникового коммутатора ключи которого управляют первой секцией (19), выходы схем совпадения И и 14 через вторую схему сборки 17 соединены со входом остальных ключей полупроводникового коммутатора. Импульсы ti, г г чувст&ительных элементов широтно-импульсного ДПР 1 поступают на сумматор 2. Суммирование имnjiTiscOB производится с разными весами, например, как это показано на фиг. 3, Uj 2151-fUa. Суммарные импульсы Us с выхода, сумматора 2 поступают на вход трех пороговые элементов 3, 4, 5, пороги срабатывания которых Un , Unj , Una показаны на фиг. 3 пунктирными линиями. Импульсы на выходе пороговых элементов 3, 4, 5 появляются в том случае, когда входное напряжение Us превысит соответствующий порог UM , Uni или Ufi3 . Выходные импульсы LJ,t, IJs.Ufi, пороговых элементов 3, 4,5 поступают на входы формирователей импульсов 6, 7, 8, на выходе которых вырабаты заются импульсы, соответстующие передним фронтам выходных- импульсов 1)4,Us, и пороговых элементов 3, 4, 5. Импульсы с выхода второго формирователя 7 поступают на первые входы двухвходовых совпадения 9, 10, на вторые входы которых поступают выходные импульсы первого 6 и третьего 8 формирователей импульсов. В случае совпадения импульсов U7 и Ue на вь1ходе схемы 9 появляется импульс, который поступает на установочный вход единицы триггера 15, переводя его в состояние «I. Если же совпадут импульсы Us и Ug, то импульс появится на выходе схемы 10 и поступит на установочный вход «О триггера 15. Наличие щпульса Uio на выходе схемы совпадения 9 свидетельствует о том, что напряжение U на выходе первого порогового элемента 3 является выходным напряжением Ui первого чувствительного элемента ДПР. В свою очередь наличие импульса Un на выходе схемы 10 свидетельствует о том, что напряжение Ui первого, чувствительного элемента ДПР в данный момент времени поступает с выхода третьего порогового элемента. Триггер 15, схемы совпадения 11, 12, 13, 14 и схемы сборки 16, 17 осуществляют распределение сигнала U4 и Ue в зависимости от наличия импульсов Uio, Un на выходах-схем совПадения 9 и 10. При наличии импульса Uio с единичного выхода триггера 15 на первые входы схем совпадения 11 и 12 поступает разрешающий потенциал. При этом на вход полупроводникового коммутатора 18 проходят импульсы U4 и Ue с выходов первого 3 и третьего 5 пороговых элементов. При наличии импульса Un триггер 15 переходит в состояние «О, и разрешающий потенциал поступает на первые входы-схем совпадения 13 и 14. В этом случае на входы полупроводникового коммутатора 18 поступают напряжения U4 и Ue с выходов третьего порогового элемента 5 и первого порогового элемента 3. Выходные импульсы Uj, U4 пороговых элементов 3, 5 поступают на вторые входы схем совпадения 11, 13 и 12, 14 и, при наличиина их первых входах разрешающего потенциала в зависимости от состояния триггера 15, поступают через схемы сборки 16, 17 на входы полупроводникового коммутатора 18, работающего в режиме широтно-импульсной модуляции. На секции электрической машины 19 поступают импульсные напряжения, otнocитeльныe длительности которых ti, Та изменяются по гармоническим законам в зависимости от угла d. поворота ротора ДПР 1. В электрической машине возникает вращающееся магнитное поле, создающее вращающий момент двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения характеристики частотной избирательности радиоприемного устройства по побочным каналам приема | 1990 |
|
SU1753609A2 |
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| Вентильный электродвигатель | 1979 |
|
SU832668A1 |
| Устройство для коммутации и регулирования сварочного тока | 1987 |
|
SU1407728A1 |
| Вентильный электродвигатель | 1985 |
|
SU1464260A1 |
| Автоматический регулятор компенсирующего устройства | 1990 |
|
SU1704145A1 |
| Синхронизатор с постоянным временем опережения | 1990 |
|
SU1820442A1 |
| Устройство для классификации объектов по акустической жесткости | 1991 |
|
SU1827654A1 |
| Устройство для измерения ширины спектра сигнала радиопередатчиков на различных уровнях | 1991 |
|
SU1798723A1 |
| Устройство для измерения скорости изменения переменного напряжения | 1990 |
|
SU1780030A1 |
