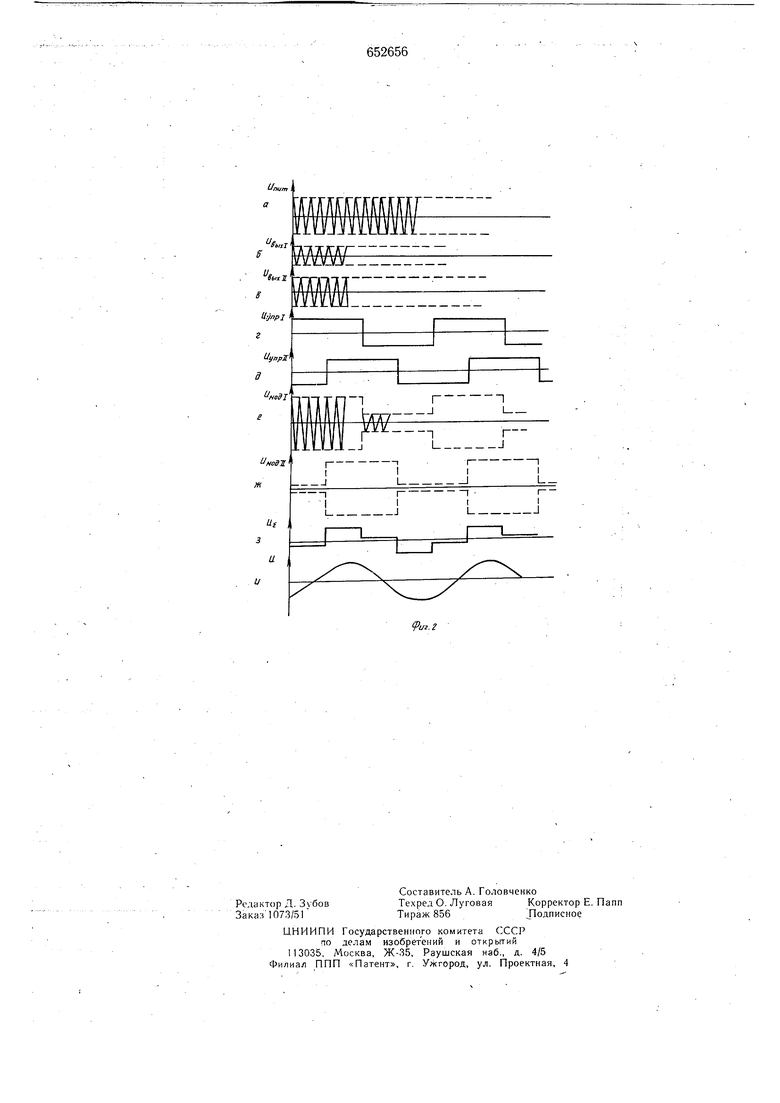
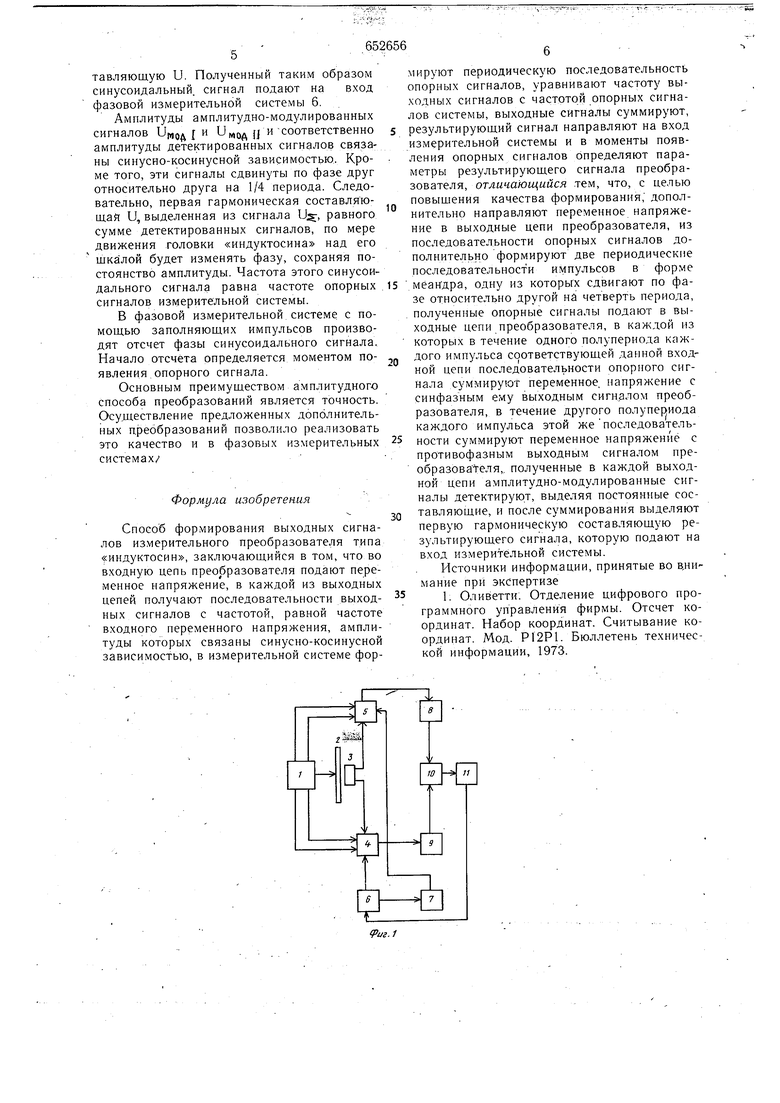
ля, полученные таким образом в каждой выходной цепи ампЛитудно-модулированные сигналы детектируют, выделяя постоянные составляющие, суммируют полученные сигналы, выделяют первую гармоническую составляющую результирующего сигнала, которую подают на вход измерительной системы. На фиг. 1 представлено устройство, реализующее данный способ; на фиг. 2 - вре менная диаграмма, поясняющая способ. Высокочастотное переменное напряжение пнт (фиг. 2,а) формируют в источнике нитания 1. Это переменное напряжение направляют во входную цепь2 индуктосина. На выводах каждой из двух обмоток головки3 .индуктосина получают последовательность ВЫХОДНЫХ сигналов (фиг. 2,6 и 2,в) соответственно, причем на одцом выводе обмотки получают сигналы, синфазные входному переменному напряжению, а на другом выводе той же обмотки - противофазные (последние на диаграмме не показаны). Сигналы U противофазные им сигналы направляют соответственно в смесители 4 ц 5. К другим входам смесителей 4 и 5 подводят переменное напряжение от источника 1. В измерительной системе 6 формируют первую последовательность импульсов меандра Uynpl (фиг. 2,г) и наг1равляют-ее в смеситель 4 и фазовращатель 7. В фазовращателе 7 формируютдругую .последователь нъгть импульсов меанДра (фиг. 2,д) и направляют ее в смеситель 5. АмНлитудно-модулированные сигналы j и и„од1г (фиг. 2,е и 2,ж) из смесителей направляют с,0ответственно в детекторы 8 и -9. После детектирования и удаления постоянной составляющей сигналы направляют в сумматор 10.. В сумматоре Ш сигналы суммируют и полученный сигнал (фиг. 2,з) направляют в фильтр 11, где выделяют из суммарного сигнала U первую гармоническую составляющую и (фиг. 2,и). Сигнал и направляют на вход измерительной системы 6. - . Устройство; реализующее способ, работает следующим образом. В источнике 1 формируют высокочастотное (1,65 Мгц) переменное напряжение Unur и направляют его в обмотку щкалы 2. На вь1водах обмоток головки 3 получают выходные сигналы Ueux J и , частбта которьг.х равна частоте В.ЧЙДйОго переменного напряжения йа одном выводе каждой из обмоток выходные сигналы .синфазны Un«T, а на другом выводе той же обмотки противофазны UPHT АмплитудыUeb.j и связаны между собой синусно-косинусной зависимостью. ыходные сигналы Ueyx j и направяют в смесители 4 и 5 соответственно. Одноременно в измерительной системе 6 из опорных сигналов формируют последовательность импульсов в форме меандра U nplЭту последовательность направляют в смеситель 4 и фазовращатель 7. В фазовращателе 7 .формируют еще одну последовательность импульсов меандра UjnpiL сдвинутую по фазе относительно на четверть периода опорных сигналов. Последовательность UynpH направляют в смеситель 5. В смесителе 4 в течение первого полупериода каждого И у1пульса меандра Ujmpf суммируют переменное напряжение UOMT с выходными сигналами UeMni, снимаемыми с одного вывода обмотки головки. При данном положении голоВки над шкалой эти сигналы, например, синфазны. При другом положении головки над щкалой сигналы, снимаемые с этого же вывода обмотки головки, противофазны Unur Затем в течение второго полупериода каждого импульса меандра Uynpf суммируют пнг с сигналами Uebixf Снимаемыми с другого вывода той же обмотки и противофазными Таким образом, в течение первого полупериода Uynp I получают сумму сигналов UnuT- и Uebixl. а в течение второго полупериода Uynpl получают разность тех же сигналов. В результате на выходе смесителя получают амплутудно-модулированный сигнал UMOA/ .глубина модуляции которого равна величине выходных сигналов индуктосина. Частота этого амплитудно-модулйрованного сигнала UMOAI равна частоте опорных сигналов измерительной системы. Одновременно, со сдвигом по фазе на 1/4 периода опорных сигналов измерительной системы аналогичные операции осуществляют в смесителе 5 с сигналами Uni,r , вых Jf управляя процессом суммирования в полупериоды сигнала Ц. В результате получают амплитудно-модулированный сигнал I/ Глубинамодуляции это-го сигнала равна величине Ueb,n , а частота равна частоте опорных сигналов Измерительной системы. Фаза сигнала U,(, 1 сдвинута относительно сигнала j на 1/4 периода. мйд РмодИ направляют в Сигналы и и 9 соответственно. В детекдетекторыторах 8 и 9 каждый из выходных сигналов детектируют и затем удаляют постоянную составляющую. Выходы детекторов 8 и 9 соединены .с различными входами сумматора 10. В этом блоке сигналы суммируют, в результате чего получают сигнал сложной формы. Результирующий сигнал пропускают через фильтр 11. В фильтре 11 из сигнала и выделяют первую гармочическую соетавляющую и. Полученный таким образом синусоидальный, сигнал подают на вход фазовой измерительной системы 6. Амплитуды амплитудно-модулированных сигналов UMJ. и UHIQ JJ и -соответственно амплитуды детектированных сигналов связаны синусно-косинусной зависимостью. Кроме того, эти сигналы сдвинуты по фазе друг относительно друга на 1/4 периода. Следовательно, первая гармоническая составляющая и, выделенная из сигнала U, равного сумме детектированных сигналов, по мере движения головки «индуктосина над его шкалой будет изменять фазу, сохраняя постоянство амплитуды. Частота этого синусоидального сигнала равна частоте опорных сигналов измерительной системы. В фазовой измерительной системе с помощью заполняющих импульсов производят отсчет фазы синусоидального сигнала. Начало отсчета определяется моментом появления опорного сигнала. Основным преимуществом амплитудного способа преобразований является точность. Осуществление предложенных дополнительных преобразований позволило реализовать это качество и в фазовых измерительных системах/ Формула изобретения Способ формирования выходных сигналов измерительного преобразователя типа «индуктосин, заключающийся в том, что во входную цепь преобразователя подают переменное напряжение, в каждой из выходных цепей получают последовательности выходных сигналов с частотой, равной частоте входного переменного напряжения, амплитуды которых связаны синусно-косинусной зависимостью, в измерительной системе формируют периодическую последовательность опорных сигналов, уравнивают частоту выходных сигналов с частотой опорных сигналов системы, выходные сигналы суммируют, результирующий сигнал направляют на вход измерительной системы и в моменты появления опорных сигналов определяют параметры результирующего сигнала преобразователя, отличающийся тем, что, с целью повыщения качества формирования; дополнительно направляют переменное напряжение в выходные цепи преобразователя, из последовательности опорных сигналов дополнительно формируют две периодические последовательности импульсов в форме меандра, одну из которых сдвигают по фазе относительно другой ни четверть периода, полученные опорные сигналы подают в выходные цепи преобразователя, в каждой из которых в течение одного полу периода каждого импульса соответствующей данной входной цепи последовательности опорного сигнала суммируют переменное, напряжение с синфазным ему выходным сигналом преобразователя, в течение другого полупеоиода каждого импульса этой же последовательности суммируют переменное напряжение с противофазным выходным сигналом преобразователя,, полученные в каждой выходной цепи амплитудно-модулированные сигналы детектируют, выделяя постоянные составляющие, и после суммирования выделяют первую гармоническую составляющую результирующего сигнала, которую подают на вход измерительной системы. Источники информации, принятые во внимание при экспертизе 1. Оливетти. Отделение цифрового программного управления фирмы. Отсчет координат. Набор координат. Считывание координат. Мод. Р12Р1. Бюллетень технической информации, 1973.
иг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования перемещения в код | 1982 |
|
SU1136314A1 |
| Преобразователь выходных сигналов индуктосина | 1983 |
|
SU1141575A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| Преобразователь перемещения в фазу переменного сигнала | 1985 |
|
SU1252942A1 |
| Преобразователь перемещения в код | 1986 |
|
SU1388990A1 |
| Двухканальный преобразователь перемещений | 1981 |
|
SU1005131A1 |
| Устройство для геологоразведки | 1979 |
|
SU807190A1 |
| Преобразователь перемещения в фазу переменного сигнала | 1985 |
|
SU1266006A1 |
| Преобразователь угол-фаза-код | 1980 |
|
SU858051A1 |