Область техники
Изобретение относится к радиотехнике, а более точно к системам радиомаячным дециметрового (ПРМГ) и метрового (ILS) диапазона волн обеспечения инструментального захода воздушных судов на посадку.
Уровень техники
Основным средством обеспечения инструментального захода самолетов гражданской авиации на посадку и посадки являются радиомаячные системы посадки (СП) метрового диапазона длин волн (MB) формата ILS (Instrument Landing System). Для обеспечения инструментального захода самолетов государственной авиации на посадку и посадки используют радиомаячные системы СП дециметрового диапазона длин волн (ДЦВ) формата ПРМГ. Радиомаячные системы посадки MB имеют почти вековую историю развития. Основные вехи развития СП MB для гражданской авиации и СП для государственной авиации в нашей стране освещены в [1]. История развития СП в США описана в [2].
Радиомаячная система посадки включает в себя курсовой радиомаяк (КРМ), глиссадный радиомаяк (ГРМ) и бортовую аппаратуру [3].
Радиомаячная группа ПРМГ-76УМ и одна из модификаций системы посадки MB выпускаются АО «Челябинский радиозавод «Полет». ПРМГ-76УМ эксплуатируется на аэродромах государственной авиации и на аэродромах совместного базирования гражданской и государственной авиации.
Курсовой радиомаяк КРМ ДЦВ (и КРМ MB так же) устанавливают на продолжении оси взлетно-посадочной полосы (ВПП), на стороне, противоположной стороне захода самолета на посадку (на расстоянии от 400 до 1150 м от торца ВПП) [4].
ГРМ ДЦВ (и ГРМ MB так же) устанавливают в точке, расположенной на расстоянии от 200 до 400 м от порога взлетно-посадочной полосы и на удалении 120…180 м от оси ВПП.
Принцип работы курсового и глиссадного радиомаяков ДЦВ и MB описан в книге [3]. Принцип действия курсового и глиссадного радиомаяков в системе посадки ПРМГ одинаков и основан на создании в пространстве равносигнальных направлений, называемых плоскостью курса и плоскостью глиссады.
Радиомаяк глиссадный или курсовой радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала посадочной радиомаячной группы [3], содержит устройство формирования сигналов посадки с выходами «сумма» и «разность», передающую антенну с входами «сумма» и «разность». Сигналы на выходах «сумма» и «разность» устройства формирования сигналов посадки представляют собой чередующиеся пачки импульсов с частотами модуляции 2100 и 1300 Гц, причем сигналы с частотой модуляции 2100 Гц на выходах «сумма» и «разность» синфазны, а сигналы с частотой модуляции 1300 Гц на выходах «сумма» и «разность» противофазны. Выходы «сумма» и «разность» устройства формирования сигналов соединены с соответствующими входами «сумма» и «разность» передающей антенны.
Антенна радиомаяка по каналу глиссады (курса) поочередно с частотой коммутации 12,5 Гц излучают чередующиеся пачки импульсов с частотами модуляции 2100 и 1300 Гц. В «нижнем» (левом) лепестке диаграммы направленности антенны с учетом влияния подстилающей поверхности преобладает частота модуляции 2100 Гц, а верхнем (правом для курсового РМ) преобладает частота модуляции 1300 Гц. Бортовая аппаратура воспринимает радиоизлучение радиомаяков, выделяет с помощью фильтров частоты модуляции 2100 и 1300 Гц и преобразует их в пропорциональные постоянные напряжения, которые сравниваются устройством сравнения. Если воздушное судно (ВС) совершает полет по глиссаде (по курсу), то амплитуды принятых и преобразованных сигналов по каждому каналу равны и на выходе элемента сравнения напряжение равно нулю. При отклонении ВС от равносигнального направления по курсу (глиссаде) напряжение одного из сигналов уменьшится, а другого увеличится, т.е. на устройстве сравнения выделится сигнал разности напряжений сигналов с частотами 2100 и 1300 Гц. Эта разность напряжений, пропорциональная отклонению ВС от равносигнальной зоны по курсу К и глиссаде Г, подается на пилотажно-навигационный прибор (ПНП) и в систему автоматического управления для автоматического управления полетом на этапе снижения по глиссаде. Индексация отклонений ВС от глиссады осуществляется в ПНП в виде отклонений глиссадной и курсовой планки от их центрального положения.
Радиомаяк глиссадный или курсовой радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала посадочной радиомаячной группы, содержащий устройство формирования сигналов посадки с выходами «сумма» и «разность», передающую антенну с входами «сумма» и «разность» [3], работающий в штатном режиме, принят авторами в качестве прототипа первого варианта радиомаяка с функцией проверки и калибровки бортовых приемников воздушных судов.
Указанный радиомаяк-прототип имеет недостаток, заключающийся в том, что его нельзя непосредственно применить для проверки и калибровки бортового оборудования. Предположим, речь идет о глиссадном радиомаяке. Зона действия ГРМ в горизонтальной плоскости составляет сектор ±8° относительно направления оси ВПП. Воздушное судно, находящееся на стоянке, предназначенной для технического обслуживания, находится вне указанного сектора. Аналогичная ситуация и с КРМ.
Принцип действия курсового и глиссадного радиомаяков радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала ILS одинаков и основан на создании в пространстве равносигнальных направлений, называемых плоскостью курса и плоскостью глиссады.
Радиомаяк глиссадный или курсовой радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала ILS, содержит устройство формирования сигналов посадки с выходом несущая плюс боковые частоты и выходом боковые частоты, распределительное устройство со входом несущая плюс боковые частоты и входом боковые частоты, передающую антенну с входом несущая плюс боковые частоты и входом боковые частоты.
Выходы устройства формирования сигналов посадки несущая плюс боковые частоты и боковые частоты последовательно соединены с соответствующими входами распределительного устройства и передающей антенны.
Антенна КРМ MB излучает в окружающее пространство электромагнитные волны в диапазоне частот от 108 до 111,975 МГц, модулированные по амплитуде сигналами тональных частот  и
и  В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами
В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами  и
и  равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП. Справа от поверхности курса (по направлению захода самолета) преобладает сигнал с глубиной модуляции несущей тональной частотой 150 Гц, а слева - сигнал с глубиной модуляции несущей тональной частотой 90 Гц.
равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП. Справа от поверхности курса (по направлению захода самолета) преобладает сигнал с глубиной модуляции несущей тональной частотой 150 Гц, а слева - сигнал с глубиной модуляции несущей тональной частотой 90 Гц.
Антенна ГРМ MB излучает в окружающее пространство электромагнитные волны в диапазоне частот 328…335 МГц, модулированные по амплитуде сигналами тональных частот 
 Поверхность, на которой разность глубин модуляции (РГМ) сигналами
Поверхность, на которой разность глубин модуляции (РГМ) сигналами  и
и  равна нулю, называют поверхностью глиссады.
равна нулю, называют поверхностью глиссады.
Линию пересечения поверхности глиссады с вертикальной плоскостью, формируемой КРМ и проходящей через ось взлетно-посадочной полосы, называют глиссадой.
Радиомаяк глиссадный или курсовой радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала ILS, содержащий устройство формирования сигналов посадки с выходом несущая плюс боковые частоты и выходом боковые частоты, распределительное устройство с входом несущая плюс боковые частоты и входом боковые частоты, передающую антенну с входом несущая плюс боковые частоты и входом боковые частоты [3], работающий в штатном режиме, принят авторами в качестве прототипа второго варианта радиомаяка с функцией проверки и калибровки бортовых приемников воздушных судов.
Указанный радиомаяк-прототип второго варианта имеет недостаток, заключающийся в том, что его нельзя непосредственно применить для проверки и калибровки бортового оборудования. Предположим, речь идет о глиссадном радиомаяке. Зона действия ГРМ MB в горизонтальной плоскости составляет сектор ±30° относительно направления оси ВПП. Воздушное судно, находящееся на стоянке, предназначенной для технического обслуживания, находится вне указанного сектора. Аналогичная ситуация и с КРМ.
В связи с высокой ответственностью за безопасность посадки воздушного судна бортовое оборудование, индицирующее отклонение воздушного судна от заданной в пространстве траектории снижения при заходе на посадку, называемой глиссадой, должно периодически проверяться и калиброваться. Для проверки и калибровки бортового оборудования воздушных судов разработаны специальные контрольные приборы, формирующие сигналы посадки с заданными значениями информационного параметра и подающие их на вход бортовых приборов. На использовании этих приборов построены способы проверки и калибровки бортового оборудования радиомаячных систем посадки. Способ проверки бортового оборудования описан, например, в методических указаниях [5]. Известны другие способы выполнения проверки и калибровки бортового посадочного оборудования, в частности, основанные на применении вычислительной техники в процессе калибровки [6].
Способ проверки бортовой аппаратуры радиомаячных систем посадки [5], заключающийся в формировании сигналов посадки с заданными значениями информационного параметра глиссадного или курсового радиомаяка, передаче сформированных сигналов посадки с заданными значениями информационного параметра радиомаяков на бортовые приемники и подстройке бортовых приемников воздушных судов для индикации заданных значений информационного параметра сигнала посадки авторы выбрали в качестве прототипа. В указанных методических указаниях на стр. 20 этот способ описан как «порядок проверки аппаратуры в режиме «Посадка». Проверка работоспособности бортовой аппаратуры по частотах курсового и глиссадного радиомаяков выполняется от наземного имитатора-прибора контроля самолетного оборудования (ПКСО). На этапе подготовительных работ имитатор устанавливают на удалении 40±10 м по оси самолета в передней или задней полусфере. Обеспечивают двухстороннюю связь проверяющего с оператором ПКСО по системе самолетного переговорного устройства. Излучением ПКСО в пространство сигнала с нулевым значением навигационного параметра (пункт 4.3.3) убеждаются в работоспособности ПКСО и бортовой аппаратуры. При этом на навигационно-пилотажном приборе (НИН) должны убраться (спрятаться) бленкеры курса и глиссады, планки положения отклонений от равносигнальной зоны занять положение в центре шкалы посадочного навигационного прибора. Установкой на ПКСО значения навигационного параметра курсового радиомаяка, равного ±100% (пункт 4.3.4, тумблер Лево - Право), убеждаются в том, что на навигационно-пилотажном приборе планка положения курса отклоняется в крайнее левое (правое) положение. Установкой на ПКСО значения навигационного параметра глиссадного радиомаяка, равного ±100% (пункт 4.3.5, тумблер Лево - Право), убеждаются в том, что на навигационно-пилотажном приборе планка положения глиссады отклоняется в крайнее верхнее (нижнее) положение.
Недостатком способа-прототипа и других известных способов проверки и калибровки бортового посадочного оборудования является необходимость наличия специального контрольного прибора. Другой недостаток заключается в том, что прибор можно применить для проверки и калибровки в каждый момент времени лишь одного воздушного судна. Последнее обстоятельство, например, не позволяет проводить быструю одновременную проверку посадочного оборудования группы воздушных судов.
Промышленность выпускает несколько специальных контрольных приборов для проверки и калибровки бортового оборудования радиомаячной системы посадки. Одним из самых распространенных приборов калибровки бортового оборудования системы посадки является прибор КПА «КПСО-69», описанный в упомянутых методических указаниях Игонина Н.Н и ТИЦ С.Н [5]. Выход прибора ПКСО соединен с передающей антенной. Прибор «КПСО-69» имеет два недостатка. Во-первых, он имеет малую мощность излучаемых сигналов - зона его действия до 40 м. Во-вторых, он предназначен для выполнения проверки бортового оборудования в каждый момент времени лишь одного воздушного судна. Кроме того, проверка бортовой аппаратуры упомянутым прибором связана с большими тратами времени специалистом по радиоэлектронному оборудованию воздушного судна.
Раскрытие изобретения
Техническая задача и технический результат предложенного изобретения состоит в расширении функциональных возможностей радиомаяка (курсового или глиссадного) системы инструментальной посадки воздушных судов, а именно, в том, что радиомаяк дополнительно к радиомаяку- прототипу позволяет осуществлять проведение проверки или калибровки бортовых приемников системы инструментальной посадки, в том числе одновременно нескольких воздушных судов.
Предложенный способ наиболее эффективен для применения в военной авиации, в которой предусмотрены не индивидуальные регулярные авиарейсы, а, как правило, групповые полеты. Используя предложенный способ проверки и калибровки бортовых приемников и его реализацию в радиомаячных системах посадки воздушных судов, можно обеспечить одновременную, в том числе предполетную, проверку всей группы воздушных судов.
Предложенное расширение функциональных возможностей радиомаяков заключается в том, что помимо основного их назначения, а именно, формирования радиотехнической траектории снижения воздушного судна, они могут формировать посадочные радиосигналы с заданными значениями информационного параметра, передавать путем излучения сформированные сигналы с заданными значениями информационного параметра на вход бортовых приемников системы посадки и таким образом с большой эффективностью заменить специальные контрольные приборы проверки и калибровки бортового оборудования радиомаячной системы посадки. Причем проверку и калибровку выполнять непосредственно на аэродроме. Проверка оказывается возможной во время предварительной подготовки воздушного судна, что существенно снижает вероятность его выхода на старт с неисправной или некалиброванной бортовой посадочной аппаратурой.
Основным отличием предлагаемого способа является то, что для осуществления проверки и калибровки бортовых приемников формируют сигнал с заданным значением информационного параметра путем суммирования выходных сигналов радиомаяка (курсового или глиссадного), далее сигнал с заданным значением информационного параметра излучают в окружающем пространстве в направлении группы воздушных судов. Таким образом, новым существенным признаком предлагаемого способа проверки и калибровки бортовых приемников является суммирование выходных сигналов радиомаяка с последующим их излучением в окружающем пространстве.
Для осуществления способа проверки и калибровки бортовых приемников воздушных судов предлагаются два варианта радиомаяков системы инструментальной посадки.
Предложенный радиомаяк первого варианта реализует упомянутый способ проверки и калибровки бортовых приемников, работающих с сигналами системы посадки с форматом сигналов ПРМГ. Радиомаяк первого варианта (фиг. 1-а,б), по существу, включает в себя известный радиомаяк (курсовой (КРМ) или глиссадный (ГРМ), содержащий устройство формирования сигналов посадки с выходами суммарного Σ сигнала и разностного Δ сигнала (названия Σ - «Сумма» и Δ - «Разность» выходов обычно выгравированы на лицевой стороне устройства) и передающую антенну с входами «сумма» Σ3 и «разность» Δ3, дополнительно содержит фидерный переключатель с входами «сумма» Σ0 и «разность» Δ0, двумя парами выходов «сумма» Σ1 и «разность» Δ1 и «сумма» Σ2 и «разность» Δ2, и управляющим входом, сумматор с входами «сумма» Σ4 и «разность» Δ4 и одним выходом, дополнительную передающую антенну дециметрового диапазона, блок управления. При этом выходы устройства формирования сигналов посадки «сумма» Σ и «разность» Δ соединены с соответствующими входами «сумма» Σ0 и Δ0 фидерного переключателя, выходы «сумма» Σ1 и «разность» Δ1 которого соединены с соответствующими входами передающей антенны, а выходы «сумма» Σ2 и «разность» Δ2 соединены с соответствующими входами сумматора, выход которого соединен с дополнительной передающей антенной. Блок управления соединен с управляющим входом фидерного переключателя.
Как известно, радиомаяк формирует выходные сигналы, которые подаются на входы антенн. Эти сигналы, имеющие названия суммарный Σ и разностный Δ, представляют собой чередующиеся последовательности импульсных радиосигналов (пачки импульсов) с частотами модуляции 1300 и 2100 Гц. В сигналах Σ и Δ последовательности радиоимпульсов с частотой 2100 Гц синфазны, а последовательности радиоимпульсов с частотой 1300 Гц противофазны. Сигналы Σ и Δ поступают на соответствующие входы Σ и Δ антенн и формируют в пространстве электромагнитное поле с заданными угловыми характеристики (азимутальными для КРМ и угломестными для ГРМ) информационного параметра посадки. Для радиомаяков с форматом сигналов ПРМГ этот информационный параметр называется коэффициентом разнослышимости сигналов (КРС). Индицируемые на индикаторе пилотажного прибора воздушного судна значения КРС показывают величины, пропорциональные угловым отклонениям воздушного судна от задаваемой траектории снижения (курса и глиссады).
В заявленном устройстве предусмотрено два режима работы. По первому режиму работы устройство аналогично прототипу формирует линию курса (глиссады) для обеспечения инструментального захода воздушных судов на посадку. Этот режим работы далее называется штатным режимом. По второму режиму заявленное устройство обеспечивает проверку или калибровку бортовых приемников системы обеспечения инструментального захода воздушных судов на посадку. Далее второй режим называется режимом проверки и калибровки.
Выбор штатного режима работы или режима проверки и калибровки осуществляется с помощью блока управления путем подачи его сигналов на управляющий вход фидерного переключателя. Блок управления в зависимости от выбранного режима работы радиомаяка подключает фидерный переключатель к передаче входных сигналов Σ и Δ либо к антенне радиомаяка (штатный режим работы радиомаяка по формированию зоны курса (глиссады), либо к передаче входных сигналов Σ и Δ на соответствующие входы сумматора (режим проверки или калибровки бортовых приемников).
В режиме проверки или калибровки бортовых приемников в сумматоре происходит суммирование сигналов Σ и Δ. Результирующий сигнал с заданным значением информационного параметра с выхода сумматора через дополнительную антенну излучается в окружающем пространстве в направлении группы самолетов, на которых производится поверка или калибровка бортовых приемников. В пространстве результирующий сигнал будет содержать последовательности радиосигналов с частотами 2100 и 1300 Гц (пачки радиоимпульсов), соотношение амплитуд которых будет определять задаваемое значение информационного параметра - КРС.
Изменяя при суммировании сигналов Σ и Δ соотношение их амплитуд и разность фаз устанавливают требуемые значения КРС.
Радиомаяк второго варианта работает в метровом диапазоне волн с форматом сигналов ILS. Выходные сигналы радиомаяка, модулированные тоновыми сигналами 90 и 150 Гц, называются «Несущая плюс боковые частоты» (НБЧ) и «Боковые частоты» (БЧ) (международное обозначение этих сигналов CBS и SBO).
Сигналы НБЧ и БЧ в радиомаяке-прототипе по второму варианту поступают на вход распределителя, с выходов которого они распределяются по излучателям антенных решеток КРМ (либо ГРМ). Излучение этих сигналов с учетом диаграмм направленности формирует пространственное распределение разности глубин модуляции (РГМ), величина которой для канала курса определяется азимутальными, а для канала глиссады угломестными координатами точки наблюдения.
На вход бортового приемника поступает сумма сигналов НБЧ и БЧ. Полосовые фильтры выделяют тоновые сигналы с частотами модуляции 90 и 150 Гц и далее определяется разность амплитуд этих сигналов, нормированная относительно постоянной составляющей - «Разность Глубин Модуляции», значение которой и является информационным параметром в системе посадки с форматом сигналов ILS. Сигналы НБЧ и БЧ в радиомаяках поступают на вход распределителя, с выходов которого они распределяются по излучателям антенных решеток КРМ и ГРМ.
Для реализации предлагаемого способа проверки и калибровки бортовых приемников радиомаячной системы воздушных судов предлагается также радиомаяк второго варианта, блок-схема которого представлена на фиг. 6-а, б.
Предложенный радиомаяк может работать либо в штатном режиме (также, как и прототип), либо в режиме проверки или калибровки бортовых приемников. Выбор режима выполняется подачей сигнала управления от блока управления на фидерный переключатель. В рабочем (штатном) режиме (фиг. 6-а) радиомаяк формирует в пространстве требуемую глиссаду (линия пересечения плоскости курса и плоскости глиссады), а в режиме проверка или калибровка (фиг. 6-б) сигналы НБЧ и БЧ через фидерный переключатель поступают на входы сумматора, на выходе которого формируется радиосигнал с заданным значением РГМ. Сформированный сигнал излучается в окружающее пространство в направлении одного или группы воздушных судов.
Технический результат, получаемый от внедрения предлагаемого способа проверки и калибровки бортовых приемников и его реализации в радиомаячных системах посадки воздушных судов заключается в расширении функциональных возможностей радиомаяка системы посадки воздушных судов, а именно, в возможности проверки и калибровки бортовых приемников системы посадки, не прибегая при этом к специальным измерительным приборам проверки и калибровки. Причем проверку и калибровку бортовых приемников системы посадки можно выполнить одновременно для группы самолетов.
Описание чертежей
На фиг. 1-а представлена блок-схема варианта 1 предлагаемого радиомаяка формата ПРМГ в режиме инструментальной посадки, а на 1-б - в режиме проверки и калибровки бортовых приемников воздушных судов
На фиг. 1 - а, б введены следующие обозначения.
1. Устройство формирования сигналов посадки формата ПРМГ с выходами Σ и Δ.
2. Фидерный переключатель с парой входов Σ0 и Δ0, первой парой выходов Σ1 и Δ1, второй парой выходов Σ2 и Δ2 и управляющим входом 201.
3. Антенна (курсовая или глиссадная).
4. Сумматор со входами Σ4 и Δ4.
5. Дополнительная передающая антенна дециметрового диапазона волн.
6. Блок управления.
7. Генератор высокочастотных колебаний.
8. Ключ.
9. Регулируемый делитель мощности на два направления.
10. Первый генератор прямоугольных колебаний.
11. Второй генератор прямоугольных колебаний.
12. Третий генератор прямоугольных колебаний.
13. Переключатель.
14. Дискретный управляемый фазовращатель.
15. Подстроечный фазовращатель.
16. Первая антенна,
17. Вторая антенна.
На фиг. 2 показаны диаграммы направленности первой и второй антенн с учетом влияния подстилающей поверхности. Введены следующие обозначения.
18. Диаграмма направленности  первой (нижней) антенны с учетом влияния подстилающей поверхности.
первой (нижней) антенны с учетом влияния подстилающей поверхности.
19. Диаграмма направленности  второй (верхней) антенны с учетом влияния подстилающей поверхности.
второй (верхней) антенны с учетом влияния подстилающей поверхности.
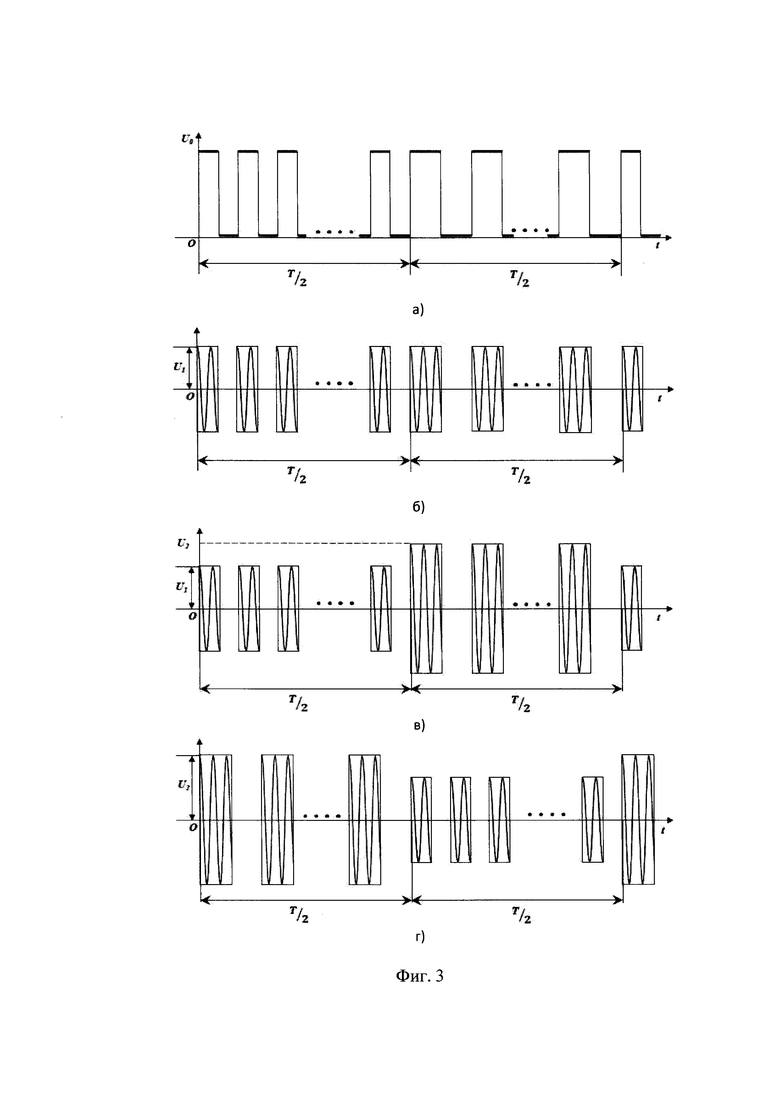
На фиг. 3-а - 3-г приведены огибающие радиочастотного сигнала.
На фиг. 4 представлены результирующие диаграммы направленности:
20 - для сигнала с частотой модуляции 2100 Гц,
21 - для сигнала с частотой модуляции 1300 Гц.
На фиг. 5. приведена зависимость КРС и тока индикации от нормированного угла места:
22 - зависимость КРС от угла места,
23 - зависимость тока индикации от угла места.
На фиг. 6-а представлена блок-схема варианта 2 предлагаемого устройства формата ILS в режиме инструментальной посадки, а на фиг. 6-б - в режиме проверки и калибровки бортовых приемников воздушных судов
24 - Блок формирования сигналов НБЧ и БЧ.
25 - Фидерный переключатель с двумя входами НБЧ0 и БЧ0 и двумя парами выходов (НБЧ1 и БЧ1) и (НБЧ2 и БЧ2) и управляющим входом.
26 - Распределитель.
27 - Сумматор.
28 - Дополнительная передающая антенна метрового диапазона волн.
29 - Блок управления.
4. Осуществление изобретения
Предлагаемый способ проверки и калибровки бортовых приемников радиомаячной системы посадки воздушных судов (далее, бортовых приемников) реализуется через устройства по настоящему изобретению. На фиг. 1-а, б приведена блок-схема первого варианта радиомаяка с функцией проверки и калибровки бортовых приемников. Для определенности будем полагать, что это глиссадный радиомаяк. Курсовой радиомаяк устроен и работает аналогично [3].
Радиомаяк (фиг. 1-а, б), реализующий предложенный способ проверки и калибровки бортовых приемников системы ПРМГ, установленных непосредственно на воздушных судах, содержит устройство 1 формирования сигналов посадки формата ПРМГ (далее, устройство 1 формирования сигналов) с выходами Σ и Δ, фидерный переключатель 2 с входом Σ0 и входом Δ0, первой парой выходов Σ1 и Δ1, второй парой выходов Σ2 и Δ2 и управляющим входом 201, глиссадную (или курсовую) антенную систему 3 с суммарным входом Σ3 и разностным входом Δ3, сумматор 4 с входом Σ4 и входом Δ4, дополнительную передающую антенну дециметрового диапазона волн 5 и блок управления 6.
Все упомянутые устройства могут быть выполнены, например, так, как они выполнены в серийно выпускаемых и эксплуатируемых в настоящее время глиссадных (курсовых) радиомаяках посадочной радиомаячной группы ПРМГ-76У либо в его предшествующих, либо в последующих модификациях.
Устройство 1 формирования сигналов может быть выполнено так же, как выполнено в прототипе, например, как передающая часть радиомаяка ПРМГ-76У, содержащая последовательно соединенные генератор 7 высокочастотных колебаний, ключ 8 и регулируемый делитель мощности 9 на два направления, первый 10, второй 11 и третий 12 генераторы прямоугольных колебаний, переключатель 13 с первым 131 и вторым 132 сигнальными входами, управляющим входом 133 и выходом 134, дискретный управляемый фазовращатель 14 с двумя фазовыми состояниями, отличающимися по величине друг от друга на 180°, с сигнальным входом 141, управляющим входом 142 и выходом 143, подстроечный фазовращатель 15. При этом выход первого 10 генератора прямоугольных колебаний соединен с сигнальными входом 131, а выход второго генератора прямоугольных колебаний 11 соединен с сигнальными входом 132 переключателя 13. Выход третьего генератора 12 прямоугольных колебаний соединен с параллельно включенными управляющим входом 133 переключателя 13 и с управляющим 142 входом дискретного управляемого фазовращателя 14. Первый выход регулируемого делителя 9 последовательно соединен с подстроечным фазовращателем 15, выход которого обозначен буквой Σ. Второй выход соединен со входом 141 дискретного управляемого фазовращателя 14, выход которого обозначен буквой Δ.
Фидерный переключатель 2 аналогичен фидерному переключателю в ГРМ-прототипе, выполняющему подключение антенной системы ГРМ к работающему комплекту радиоаппаратуры, а при выходе этого комплекта из строя обеспечивает автоматическое переключение антенной системы на резервный комплект.
В качестве антенной системы 3 может быть применена, например, штатная антенная система глиссадного (курсового) радиомаяка ГТРМГ-76У.
Сумматор 4 содержится в ПРМГ-76У в качестве основного элемента так называемой линейки фидерного тракта упомянутого радиомаяка.
Дополнительная передающая антенна 5 дециметрового диапазона волн может быть выполнена, например, аналогичной рупорной антенне глиссадного радиомаяка.
Блок управления 6 аналогичен блоку управления фидерным переключателем, применяемым в упомянутых радиомаяках для переключения основного и резервного комплектов аппаратуры.
Заявляемый радиомаяк (вариант 1) с функцией проверки и калибровки бортовых приемников воздушных судов может работать либо в штатном режиме, либо в режиме проверки и калибровки бортовых приемников. Выбор штатного режима работы или режима проверки и калибровки осуществляют с помощью блока управления 6 путем подачи его сигналов на управляющий вход 201 фидерного переключателя 2.
Работа радиомаяка формата ПРМГ в режиме инструментальной посадки воздушных судов (вариант 1 радиомаяка)
В штатном режиме (фиг. 1-а) указанные устройства соединены между собой следующим образом. Выходы Σ и Δ устройства 1 формирования сигналов соединены с соответствующими входами Σ0 и Δ0 фидерного переключателя 2, выход Σ1, которого соединен с суммарным входом Σ3 а выход Δ1 соединен с разностным входом Δ3 антенной системы 3. При этом выход Σ2 разъединен со входом Σ4, выход Δ2 разъединен со входом Δ4.
Высоты подвеса относительно поверхности Земли h1 первой 16 и h2 второй 17 антенн равны  и
и  где λ - длина волны, θгл - угол глиссады. В результате излучения сигнала первой (второй) антенной в пространстве формируется диаграмма направленности
где λ - длина волны, θгл - угол глиссады. В результате излучения сигнала первой (второй) антенной в пространстве формируется диаграмма направленности 
 (Фиг. 2).
(Фиг. 2).
Радиомаяк по варианту 1 в штатном режиме работает следующим образом (фиг. 1-а). Гармонические колебания с несущей частотой ω от высокочастотного генератора 7 поступают на сигнальный вход ключа 8, на управляющий вход которого поступают две чередующиеся последовательности прямоугольных колебаний (фиг. 3-а): с частотой 2100 Гц с выхода первого 10 генератора прямоугольных колебаний и с частотой 1300 Гц с выхода второго 11 генератора прямоугольных колебаний. Смена прохождения колебаний с частотами 2100 Гц и 1300 Гц осуществляется под управлением третьего 12 генератора с частотой 12,5 Гц, сигналы которого одновременно поступают на управляющий вход 133 переключателя 13 и управляющий вход 142 дискретного управляемого фазовращателя 14. В течение одного полупериода коммутации (в течение 0,04 сек.) через переключатель следует периодический сигнал прямоугольной формы, длительность импульса и длительность паузы которого в периоде равны друг другу («меандр»), с частотой 2100 Гц (фиг. 3-а), а течение второго полупериода коммутации (в течение последующих 0,04 сек.) следует сигнал в форме «меандр» с частотой 1300 Гц.
Высокочастотный сигнал, модулированный последовательно сигналами в форме «меандр» с частотой 2100 Гц и 1300 Гц (фиг. 3-б)), с выхода ключа 8 поступает на вход регулируемого делителя 9. С первого выхода регулируемого делителя 9 сигнал поступает через подстроечный фазовращатель 15 и фидерный переключатель 2 на первую 16 (нижнюю) антенну. Со второго выхода регулируемого делителя сигнал поступает на дискретный управляемый фазовращатель 14, с выхода которого через фидерный переключатель 2 поступает на вторую 17 антенну. С выхода третьего 12 генератора управляющие сигналы одновременно поступают и на управляющий вход переключателя 13 и на управляющий вход 142 дискретного управляемого фазовращателя 14. Прохождение сигналов с частотой «меандра» 2100 Гц выполняется в течение одного полупериода колебания генератора 12 с частотой 12,5 Гц. По окончании первого полупериода скачкообразно изменяется на половину длины волны электрическая длина пути дискретного управляемого фазовращателя для прохождения высокочастотного сигнала, модулированного с частотой «меандра» 1300 Гц. В каждый из полупериодов колебания с частотой 12,5 Гц высокочастотные колебания излучаются и первой 16 и второй 17 антеннами.
В первом полупериоде обе антенны излучают синфазные высокочастотные сигналы, модулированные «меандром» с частотой 2100 Гц. В окружающем пространстве формируется 20 амплитудная диаграмма направленности  (фиг. 4).
(фиг. 4).

где:
 - соотношение комплексных амплитуд сигналов в первой и второй антеннах, устанавливаемое регулируемым делителем мощности.
- соотношение комплексных амплитуд сигналов в первой и второй антеннах, устанавливаемое регулируемым делителем мощности.
Во втором полупериоде излучаются сигналы,. модулированные «меандром» с частотой 1300 Гц. При этом сигналы в первой и второй антеннах противофазны между собой. В результате в пространстве формируется 21 амплитудная диаграмма направленности  (фиг. 4).
(фиг. 4).

Точка пересечения диаграмм направленности  и
и  определяет положение угла глиссады
определяет положение угла глиссады  При этом выше угла глиссады
При этом выше угла глиссады  преобладает сигнал, модулированный «меандром» с частотой 1300 Гц (фиг. 3-в). Ниже угла глиссады
преобладает сигнал, модулированный «меандром» с частотой 1300 Гц (фиг. 3-в). Ниже угла глиссады  преобладает сигнал, модулированный «меандром» с частотой 2100 Гц (фиг. 3-г).
преобладает сигнал, модулированный «меандром» с частотой 2100 Гц (фиг. 3-г).
Принятые на борту воздушного судна высокочастотные сигналы ГРМ подвергаются преобразованию. Высокочастотные сигналы усиливаются в приемно-усилительном каскаде. Усиленные сигналы поступают на детектор. На выходе детектора тоновые сигналы выделяются полосовыми фильтрами и подвергаются выпрямлению. Разность и сумма выпрямленных тоновых токов формируют информационный сигнал: Коэффициент Разнослышимости Сигналов.
На фиг. 5 приведена требуемая нормативными документами [7] зависимость информационного параметра от угла места  и соответствующая ему величина тока индикации
и соответствующая ему величина тока индикации 
На фиг. 5 по горизонтали отложен нормированный угол места  В качестве нормы выбран угол глиссады
В качестве нормы выбран угол глиссады  По вертикали откладывается величина КРС в процентах и ток индикации I в мкА. Вертикальными прямыми указаны границы зоны действия ГРМ в вертикальной плоскости: нижняя граница, равная
По вертикали откладывается величина КРС в процентах и ток индикации I в мкА. Вертикальными прямыми указаны границы зоны действия ГРМ в вертикальной плоскости: нижняя граница, равная  и верхняя граница, равная
и верхняя граница, равная  Горизонтальными прямыми указаны границы полусектора: граница верхней части полусектора, равная плюс 0,165 КРС и граница нижней части полу
Горизонтальными прямыми указаны границы полусектора: граница верхней части полусектора, равная плюс 0,165 КРС и граница нижней части полу
сектора, равная минус 0,165 КРС, и соответствующие им токи индикации плюс 125 мкА и минус 125 мкА, соответственно. Кроме того, горизонтальными прямыми указаны границы монотонного изменения информационного параметра  и соответствующие им токи
и соответствующие им токи 
Таким образом, в штатном режиме заявленное устройство формирует глиссаду (линию курса) для обеспечения инструментального захода воздушных судов на посадку.
Работа ГРМ формата ПРМГ в режиме проверки или калибровки бортовых приемников, (вариант 1 радиомаяка)
В режиме проверки и калибровки бортовых приемников радиомаяк по варианту 1 (фиг. 1-б) указанные устройства соединены между собой следующим образом. Выходы Σ и Δ устройства 1 формирования сигналов соединены с соответствующими входами Σ0 и Δ0 фидерного переключателя 2, выход Σ2 которого соединен с входом Σ4, а выход Δ2 соединен с входом Δ4 сумматора 4. Выход сумматора 4 соединен с дополнительной 5 передающей антенной дециметрового диапазона волн. При этом выход Σ1 разъединен со входом Σ3, выход Δ1 разъединен со входом Δ3. Устройство обеспечивает проверку или калибровку бортовых приемников системы обеспечения инструментального захода воздушных судов на посадку.
Предлагаемое устройство (вариант 1) работает следующим образом (фиг. 1-б). Гармонические колебания с несущей частотой ω от высокочастотного генератора 7 поступают на сигнальный вход ключа 2, на управляющий вход которого поступают две чередующиеся последовательности прямоугольных колебаний: с частотой 2100 Гц с выхода первого 10 генератора прямоугольных колебаний и с частотой 1300 Гц с выхода второго 11 генератора прямоугольных колебаний. Смена прохождения колебаний с частотами 2100 Гц и 1300 Гц осуществляется под управлением третьего 12 генератора с частотой 12,5 Гц, сигналы которого одновременно поступают на управляющий вход 133 переключателя 13 и управляющий вход 142 дискретного управляемого фазовращателя 14. В течение одного полупериода коммутации (в течение 0,04 сек.) через переключатель следует периодический сигнал прямоугольной формы, длительность импульса и длительность паузы которого в периоде равны друг другу («меандр»), с частотой 2100 Гц, а течение второго полупериода коммутации (в течение последующих 0,04 сек.) следует сигнал в форме «меандр» с частотой 1300 Гц.
Высокочастотный сигнал, модулированный последовательно сигналами в форме «меандр» с частотой 2100 Гц и 1300 Гц, с выхода ключа 8 поступает на вход регулируемого делителя 9. С первого выхода регулируемого делителя 9 сигнал поступает через подстроечный фазовращатель 15 на выход Σ. Со второго выхода регулируемого делителя 9 сигнал поступает на дискретный управляемый фазовращатель 14, с выхода которого поступает на выход Δ. С выхода третьего 12 генератора управляющие сигналы одновременно поступают и на управляющий вход переключателя 13 и на управляющий вход 142 дискретного управляемого фазовращателя 14. Прохождение сигналов с частотой «меандра» 2100 Гц выполняется в течение одного полупериода колебания генератора 12 с частотой 12,5 Гц. По окончании первого полупериода скачкообразно изменяется на половину длины волны электрическая длина пути дискретного управляемого фазовращателя для прохождения высокочастотного сигнала, модулированного с частотой «меандра» 1300 Гц.
Сигналы с выходов Σ и Δ через фидерный переключатель 2 поступают на соответствующие входы Σ4 и Δ4 сумматора 4. В сумматоре происходит суммирование сигналов. Результирующий сигнал с выхода сумматора 4 через дополнительную антенну дециметрового диапазона волн 5 излучается в направлении воздушного судна или группы воздушных судов, на которых выполняется проверка или калибровка бортовых приемников. Результирующий сигнал будет содержать последовательности радиосигналов с частотами 2100 и 1300 Гц (пачки радиоимпульсов), соотношение амплитуд которых будет определять задаваемое значение информационного параметра - КРС.
Рассмотрим формирование наперед заданного значения информационного параметра - величины КРС.
Примем амплитуду  напряжения высокочастотного сигнала с частотой модуляции 2100 Гц на выходе Σ2 за единицу. Тогда комплексная амплитуда
напряжения высокочастотного сигнала с частотой модуляции 2100 Гц на выходе Σ2 за единицу. Тогда комплексная амплитуда  напряжения высокочастотного сигнала с частотой модуляции 1300 Гц на выходе Δ2 равна плюс
напряжения высокочастотного сигнала с частотой модуляции 1300 Гц на выходе Δ2 равна плюс 
Примем амплитуду  напряжения высокочастотного сигнала с частотой модуляции 1300 Гц на выходе Σ2 за единицу. Тогда комплексная амплитуда
напряжения высокочастотного сигнала с частотой модуляции 1300 Гц на выходе Σ2 за единицу. Тогда комплексная амплитуда  напряжения высокочастотного сигнала с частотой модуляции 1300 Гц на выходе Δ2 равна минус
напряжения высокочастотного сигнала с частотой модуляции 1300 Гц на выходе Δ2 равна минус 
Разные знаки перед комплексными амплитудами напряжения сигналов с частотой модуляции 1300 Гц обусловлены указанной выше синфазностью высокочастотных сигналов с частотой модуляции 2100 Гц и противофазностью высокочастотных сигналов с частотой модуляции 1300 Гц.
Обозначим буквой  коэффициент суммирования сигналов, поступающих в сумматор со входов Σ4 и Δ4. Тогда информационный параметр КРС на выходе сумматора определяется по следующей формуле:
коэффициент суммирования сигналов, поступающих в сумматор со входов Σ4 и Δ4. Тогда информационный параметр КРС на выходе сумматора определяется по следующей формуле:

Пусть  представляет собой вещественную величину
представляет собой вещественную величину 
Тогда

Изменяя при суммировании сигналов  и
и  соотношение их амплитуд и разности фаз изменением комплексного коэффициента
соотношение их амплитуд и разности фаз изменением комплексного коэффициента  ,устанавливают заданное значение КРС в пределах от минус 100% до плюс 100%.
,устанавливают заданное значение КРС в пределах от минус 100% до плюс 100%.
Работа радиомаяка формата ILS с функцией проверки и калибровки бортовых приемников в штатном режиме (вариант 2 радиомаяка)
Предлагаемый способ проверки и калибровки бортовых приемников воздушных судов реализуется также через устройство по настоящему изобретению, блок-схема которого для системы посадки с форматом сигналов ILS приведена на фиг. 6-а,б.
Упомянутый радиомаяк (фиг. 6-а,б содержит блок 24 формирования сигналов НБЧ и БЧ, (входящий в состав аппаратуры радиомаяка-прототипа), с выходом НБЧ и выходом БЧ, фидерный переключатель 25 с двумя входами НБЧ0 и БЧ0, двумя парами выходов (НВЧ1 и БЧ1) и (НБЧ2 и БЧ2) и управляющим входом, распределитель 26, но в отличие от прототипа, включает сумматор 27 с двумя входами НБЧ4 и БЧ4 и выходом, дополнительную антенну метрового диапазона 28 и блок управления 29.
В штатном режиме устройства, входящие в состав радиомаяка по варианту 2 (фиг. 6-а), соединены между собой следующим образом. Выход НБЧ и выход БЧ блока 24 формирования сигналов НБЧ и БЧ соединены с одноименными входами фидерного переключателя 25. Выходы НБЧ1 и БЧ1 переключателя 25 соединены с соответствующими входами НБЧ3 и БЧ3 распределителя 26. Блок управления 29 соединен с управляющим входом фидерного переключателя 25. При этом выход НБЧ2 разъединен со входом НБЧ4, выход БЧ2 разъединен со входом БЧ4 распределителя 27.
Предложенный способ и устройство могут быть использованы при эксплуатации как одночастотных, так и двухчастотных радиомаяков. Для простоты ограничимся рассмотрением работы устройства при проверке и калибровке систем посадки с одночастотными курсовым и глисадным радиомаяками (КРМ и ГРМ). В двухчастотных радиомаяках необходимо использовать устройство формирования сигналов посадки «узкого» канала (УК) (канал УК - это канал формирования информационного параметра в окрестности линии снижения, канал ШК - широкий канал формирует информационный параметр вблизи угловых границ зоны действия радиомаяков).
Для определенности рассмотрим далее работу курсового радиомаяка. Глиссадный радиомаяк устроен и работает аналогично курсовому радиомаяку.
Как известно [4], КРМ установлен на продолжении оси взлетно-посадочной полосы (ВПП), на стороне, противоположной стороне захода самолета на посадку. Антенна КРМ излучает в окружающее пространство электромагнитные волны в диапазоне частот 108…112 МГц, модулированные по амплитуде сигналами тональных частот 
 В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами
В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами  и
и  равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП (плоскость курса).
равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП (плоскость курса).
Сигналы НБЧ и БЧ в радиомаяках поступают на вход распределителя, с выходов которого они распределяются по излучателям антенных решеток КРМ. Излучение этих сигналов с учетом диаграмм направленности формирует пространственное распределение разности глубин модуляции (РГМ), величина которой для канала курса определяется азимутальными, а для канала глиссады угломестными координатами точки наблюдения.
Принятый на борту самолета суммарный (НБЧ плюс БЧ) сигнал проходит через входные цепи приемника, смеситель, усилитель промежуточной частоты и поступает на вход линейного детектора. Согласно [8], на выходе линейного детектора, включающего в себя низкочастотный фильтр, наблюдают сигнал, описываемый модулем огибающей суммарного сигнала, называемым физической огибающей. Медленно меняющаяся физическая огибающая не искажается НЧ фильтром. Далее сигнал поступает на вход полосно-пропускающих фильтров, которые выделяют составляющие с частотами  и
и  Амплитуды напряжений выделенных колебаний нормируются относительно постоянной составляющей суммарного сигнала. Выделенные нормированные составляющие сигнала проходят через выпрямители, на выходе которых формируется разностное напряжение, поступающее на микроамперметр, который показывает величину тока, пропорциональную РГМ. Коэффициент пропорциональности между величиной тока и РГМ одинаков для всех бортовых приемников ILS. Поэтому при летных проверках параметров КРМ и ГРМ значения РГМ измеряют в микроамперах, не переводя их в проценты.
Амплитуды напряжений выделенных колебаний нормируются относительно постоянной составляющей суммарного сигнала. Выделенные нормированные составляющие сигнала проходят через выпрямители, на выходе которых формируется разностное напряжение, поступающее на микроамперметр, который показывает величину тока, пропорциональную РГМ. Коэффициент пропорциональности между величиной тока и РГМ одинаков для всех бортовых приемников ILS. Поэтому при летных проверках параметров КРМ и ГРМ значения РГМ измеряют в микроамперах, не переводя их в проценты.
Работа радиомаяка формата ILS в режиме проверки или калибровки бортовых приемников (вариант 2)
Для формирования заданного постоянного значения РГМ в зоне расположения самолетов, в которых проводится проверка или калибровка бортовых приемников, предлагается радиомаяк, блок-схема которого представлена на фиг. 6-б.
Упомянутый радиомаяк содержит блок 24 формирования сигналов НБЧ и БЧ, (входящее в состав аппаратуры радиомаяка-прототипа), с выходом НБЧ и выходом БЧ, фидерный переключатель 25 с двумя входами НБЧ0 и БЧ0, двумя парами выходов (НБЧ1 и ВЧ1) и (НБЧ2 и БЧ2) и управляющим входом, распределитель 26, сумматор 27 с двумя входами НБЧ4 и БЧ4 и выходом, дополнительную антенну 28 и блок управления 29.
Устройства радиомаяка по варианту 2 в режиме проверки и калибровки бортовых приемников (фиг. 6-б) соединены между собой следующим образом. Выход НБЧ и выход БЧ блока 24 формирования сигналов НБЧ и БЧ соединены с одноименными входами фидерного переключателя 25. Выходы НБЧ1 и БЧ1 переключателя 25 разъединены с соответствующими входами распределителя 26, а выходы НБЧ2 и БЧ2 соединены с соответствующими входами НБЧ4 и БЧ4 сумматора 27, выход которого соединен с дополнительной антенной 28. Блок управления 29 соединен с управляющим входом фидерного переключателя. При этом выход НБЧ1 разъединен со входом НБЧ3, выход БЧ1 разъединен со входом БЧ3.
Выбор работы в штатном режиме или в режиме проверки и калибровки бортовых приемников режима выполняется подачей сигнала управления от блока управления 29 на управляющий вход фидерного переключателя 25.
Предлагаемый радиомаяк по варианту 2 работает следующим образом (фиг. 6-б). Сигналы НБЧ и БЧ через фидерный переключатель 25 поступают на входы сумматора 27, на выходе которого формируется радиосигнал с заданным значением РГМ. Далее этот сигнал с заданным значением РГМ с помощью дополнительной антенны метрового диапазона волн 28 излучается в направлении одного или группы воздушных судов, на которых выполняется проверка или калибровка бортовых приемников.
Все дополнительные устройства, входящие в предлагаемое устройство в соответствии с фиг. 6-а,б, могут быть изготовлены в соответствии с аналогичными устройствами, входящими в состав аппаратуры КРМ и ГРМ с форматом сигналов ILS, находящихся в эксплуатации и выпускаемые промышленностью (СП-75, СП-80, СП-90 и др.).
Таким образом, решена техническая задача проверки и калибровки бортовых приемников радиомаячной системы обеспечения инструментального захода воздушных судов на посадку путем формирования посадочных радиосигналов с заданными значениями информационного параметра на основе сигналов непосредственно радиомаяка, передаче сформированных сигналов с заданными значениями информационного параметра на вход бортовых приемников системы посадки; получен технический результат предложенного изобретения, заключающийся в расширении функциональных возможностей радиомаяка системы инструментальной посадки воздушных судов, (курсового или глиссадного), а именно, в том, что радиомаяк дополнительно к прототипу позволяет проведение проверки или калибровки бортовых приемников системы инструментальной посадки, в том числе, одновременно нескольких воздушных судов. Используя предложенный способ проверки и калибровки бортовых приемников и его реализацию в радиомаячных системах посадки воздушных судов можно обеспечить одновременную, в том числе предполетную, проверку группы воздушных судов. Реализация заявленного способа не требует дорогостоящих приборов для проверки бортового оборудования системы посадки самолетов, повышает оперативность проверки и калибровки бортового оборудования, сокращает время на обслуживание самолета специалистом по радиоэлектронному оборудованию, обслуживающим самолет. Реализация способа и радиомаяка с дополнительной функцией проверки и калибровки бортовых приемников повышает целостность систем радиомаячных дециметрового (ПРМГ) и метрового (ILS) диапазона волн обеспечения инструментального захода воздушных судов на посадку.
Список используемой литературы
1. НИИ-33 / ВНИИРА. История становления и развития Всесоюзного НИИ радиоаппаратуры - СПб.: 2007. - 291 с.
2. Watts, С.В., Jr. Instrument Landing Scrapbook / С.В., Jr. Watts. - Trafford Publishing, 2005. 392 pp.
3. Пахолков Г.А., Кашинов B.B. и др. Угломерные радиотехнические системы посадки. - М.: Транспорт. - 1982.
4. Сосновский А.А., Хаймович И.А., Шолупов Е.И. Радиомаячные системы посадки самолетов, М.: Машиностроение, 1974.
5. Игонин Н.Н., Тиц С.Н. Техническое обслуживание навигационно-посадочной системы самолета ЯК-42. Методические указания. Самарский государственный аэрокосмический университет им. академика С.П. Королева, г. Самара, 2005 г, 24 с.
6. Волосов Г.И. и др. Наземная автоматизированная система контроля бортового оборудования самолетов. Заявка на полезную модель №2002130345/20, 14.11.2002.
7. ГОСТ 15827-70 «Системы радиомаячные дециметрового диапазона второй категории инструментального захода самолетов на посадку».
8. Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 2-е издание. - 446 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| Глиссадный радиомаяк | 2023 |
|
RU2818668C1 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК ДЛЯ ЗАХОДА НА ПОСАДКУ ПО КРУТОЙ ТРАЕКТОРИИ (ВАРИАНТЫ) | 2016 |
|
RU2619071C1 |
| ДВУХЧАСТОТНЫЙ ГЛИССАДНЫЙ РАДИОМАЯК | 2016 |
|
RU2624263C1 |
| Глиссадный радиомаяк | 2018 |
|
RU2693024C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| Посадочная радиомаячная группа дециметрового диапазона длин волн | 2022 |
|
RU2801583C1 |
| Способ и устройство контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы | 2019 |
|
RU2725891C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК (ВАРИАНТЫ) | 2009 |
|
RU2429499C2 |

Изобретение относится к радиотехнике, а именно к способу проверки и калибровки бортовых приемников радиомаячной системы инструментальной посадки воздушных судов и системам радиомаячным дециметрового (ПРМГ) и метрового (ILS) диапазона волн. Технический результат состоит в расширении функциональных возможностей радиомаяка (курсового, глиссадного радиомаячной системы посадки группы (ПРМГ) или системы ILS), а именно в разработке способа и радиомаяков, обеспечивающих для указанных систем проведение проверки, калибровки бортовых приемников воздушных судов, в том числе одновременно нескольких воздушных судов. В заявленном способе на радиомаяке формируют сигнал с заданным значением информационного параметра путем суммирования выходных сигналов радиомаяка, сформированный сигнал излучают в окружающее пространство в направлении группы воздушных судов, подстраивают показания бортовых приемников по заданным значениям информационного параметра. При этом заявленные радиомаяки дополнительно содержат фидерный переключатель, сумматор, передающую антенну и блок управления. Радиомаяк может работать либо в штатном режиме, либо в режиме проверки и калибровки бортовых приемников. Выбор режима работы осуществляют с помощью блока управления путем подачи его сигналов на управляющий вход фидерного переключателя. 3 н.п. ф-лы, 6 ил.
1. Способ проверки и калибровки бортовых приемников радиомаячной системы инструментальной посадки воздушных судов, заключающийся в формировании сигналов посадки с заданными значениями информационного параметра глиссадного или курсового радиомаяка, передаче сформированных сигналов посадки с заданными значениями информационного параметра радиомаяков на бортовые приемники и подстройке бортовых приемников воздушных судов для индикации заданных значений информационного параметра сигнала посадки, отличающийся тем, что для проверки и калибровки бортовых приемников сигналы системы посадки с заданными значениями информационного параметра формируют путем подачи сигналов блока управления на управляющий вход фидерного переключателя для передачи входных сигналов посадки на входы сумматора, в котором производят суммирование выходных сигналов глиссадного или курсового радиомаяка, управляя при этом соотношением амплитуд и фаз выходных сигналов глиссадного или курсового радиомаяка для получения задаваемого значения информационного параметра, в качестве которого для радиомаяков с форматом сигналов посадочно-радиомаячных групп (ПРМГ) дециметрового диапазона длин волн используют коэффициент разнослышимости сигналов (КРС), а для радиомаяков с форматом сигналов систем инструментального захода воздушных судов на посадку (ILS) метрового диапазона длин волн – значение разности глубин модуляции (РГМ), излучают сформированные сигналы с заданными значениями информационного параметра в окружающее пространство для приема на бортовых приемниках и производят проверку и калибровку бортовых приемников.
2. Радиомаяк глиссадный или курсовой радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала посадочной радиомаячной группы, реализующий способ по п. 1, содержащий устройство формирования сигналов посадки с выходами «сумма» и «разность», передающую антенну с входами «сумма» и «разность», отличающийся тем, что дополнительно содержит фидерный переключатель с входами «сумма» и «разность» с первой и второй парами выходов «сумма» и «разность» и управляющим входом, сумматор с входами «сумма» и «разность» и одним выходом, дополнительную передающую антенну и блок управления с выходом, при этом выходы «сумма» и «разность» устройства формирования сигналов посадки соединены с соответствующими входами «сумма» и «разность» фидерного переключателя, выходы «сумма» и «разность» первой пары выходов которого соединены с соответствующими входами «сумма» и «разность» передающей антенны, а выходы «сумма» и «разность» второй пары выходов соединены с соответствующими входами «сумма» и «разность» сумматора, выход которого соединен с дополнительной передающей антенной, а выход блока управления соединен с управляющим входом фидерного переключателя.
3. Радиомаяк глиссадный или курсовой радиомаячной системы инструментальной посадки воздушных судов с форматом сигнала ILS, реализующий способ по п. 1, содержащий устройство формирования сигналов посадки с выходом несущая плюс боковые частоты и выходом боковые частоты, распределительное устройство с входом несущая плюс боковые частоты и входом боковые частоты, передающую антенну с входом несущая плюс боковые частоты и входом боковые частоты, отличающийся тем, что дополнительно содержит фидерный переключатель с входом несущая плюс боковые частоты и входом боковые частоты, спервой парой выходов несущая плюс боковые частоты и боковые частоты и второй парой выходов несущая плюс боковые частоты, управляющим входом, сумматор с входом несущая плюс боковые частоты и входом боковые частоты и одним выходом, дополнительную передающую антенну и блок управления, при этом выходы устройства формирования сигналов посадки несущая плюс боковые частоты и боковые частоты соединены с соответствующими входами несущая плюс боковые частоты и боковые частоты фидерного переключателя, выходы которого несущая плюс боковые частоты и боковые частоты первой пары выходов последовательно соединены с соответствующими входами распределительного устройства и передающей антенны, а выходы несущая плюс боковые частоты и боковые частоты второй пары выходов соединены с соответствующими входами несущая плюс боковые частоты и боковые частоты сумматора, выход которого соединен с дополнительной передающей антенной, а выход блока управления соединен с управляющим входом фидерного переключателя.
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| Способ обнаружения фазовой расстройки между суммарным и разностным сигналами глиссадного радиомаяка | 1982 |
|
SU1193614A1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2468964C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ОШИБКИ ПРИ УПРАВЛЕНИИ ДВИЖЕНИЕМ ОБЪЕКТА С ЦЕЛЬЮ ВЫВОДА ЕГО НА ЗАДАННУЮ ТОЧКУ | 2013 |
|
RU2543064C1 |
| Штамм клубеньковых бактерий Bradyrhizobium elkanii Ву-25 для изготовления бактериального удобрения под сою и зернобобовые культуры | 2025 |
|
RU2840411C1 |
| US 6414632 B1, 02.07.2002 | |||
| US 10147328 B2, 04.12.2018 | |||
| US 3750176 A, 31.07.1973. | |||

