Предлагаемые изобретения относятся к области точного оружия (ТО) и касаются таких объектов самонаведения (ОС) как вращающиеся зенитные управляемые ракеты (ВЗУР) и вращающиеся управляемые артиллерийские снаряды (ВУАС) с релейным рулевым приводом. Указанные ОС стабилизируются вращением вокруг оси крена и управляются по курсу и тангажу одним сигналом управления (СУ), а информация о двух компонентах вектора управляющей силы также содержится в признаках и параметрах одного СУ, поэтому они получили название одноканальных.
Как правило, ВЗУР и ВУАС снабжаются пассивной или полуактивной оптической головкой самонаведения (ОГС), в состав которой входят оптико-электронный следящий координатор (ОЭСК), оптико-электронная следящая система (ОЭСС), система электрического арретирования (СЭА) ротора гироскопа ОЭСК, разгонное устройство, система стабилизации частоты вращения ротора гироскопа и другие вспомогательные устройства. Но несмотря на такой сложный функциональный состав и структуру, единственным “продуктом”, если так можно выразиться, который вырабатывает ОГС и затем формирует автопилот (АП), является одноканальный СУ, который поступает на рулевой привод для управления ракетой или снарядом, и который несет в своих информативных признаках и параметрах информацию о координатах цели, текущих значениях модуля и фазы вектора управляющей силы, которая по модулю должна быть пропорциональна угловой скорости вращения линии визирования (лв) “ракета - цель”, а по фазе совпадать с направлением вращения лв.
Чтобы ВЗУР или ВУАС сближались с целью по оптимальной траектории в упрежденную точку встречи с малой вероятностью промаха, ОГС должна вырабатывать точные команды как по фазе, так и по модулю во всем диапазоне угловой скорости вращения линии визирования лв. Поэтому определение коэффициента команды (далее КК) является самым важным и главным при контроле параметров как ОГС, так и ВЗУР и ВУАС в целом. Измерение КК должно быть точным и иметь высокое быстродействие, не менее постоянной времени ракеты или снаряда, за которое они отрабатывают команды, демодулируя СУ, то есть, определять КК надо в реальном масштабе времени (РМВ). Иначе это будет некая усредненная величина, не отражающая ни кинематику ракеты и снаряда, ни кинематику и динамику контура наведения в целом.
Для вращающихся одноканальных объектов самонаведения практически неприемлемо непосредственное измерение УС в реальном полетном режиме по множеству причин.
Одной из главных является необходимость измерения во всем диапазоне лв, что дает информацию о форме функции изменения КК в зависимости от ω лв, которая в идеале должна приближаться к линейной, чтобы при самонаведении реализовать метод пропорционального наведения. Поэтому для таких сложных нестандартных измерений параметров ОГС, как определение КК и измерений некоторых других параметров ОГС, используют полуфизическую модель, когда ОГС или весь объект самонаведения закручивают вокруг оси крена на стенде и они отслеживают установленный там же имитатор цели, а стенд вращают по другой координате во всем диапазоне ω лв и определяют КК и форму функциональной зависимости модуля вектора КК от ω лв.
По физическому смыслу КК есть коэффициент использования УС и определяется как отношение УС к максимально возможной УС, что по математическому представлению есть нормированный к единице безразмерный вектор УС и все известные способы и устройства для определения КК основываются на этом представлении.
Известней способ определения КК, заключающийся в демодуляции СУ с выхода руль-машинки (РМ) с выделением и фильтрацией постоянной составляющей (1).
Известное устройство для осуществления способа (1) содержит вращающийся по 1-й координате стенд, задающий заданную ω лв, вращающиесся на нем по второй координате объект самонаведения и датчик квадратурных опорных сигналов, и последовательно соединенные перемножители опорных сигналов, фильтры низкой частоты и стрелочный индикатор.
Известные способ и устройство не обеспечивают прямого измерения модуля и фазы вектора КК, а определяют только его проекции на оси связанной с объектом системы координат по курсу и тангажу, что требует восстановление вектора КК по проекциям. Они также не обеспечивают измерение в РМВ, то есть, имеют недостаточные точность и быстродействие. Аналоговая идеология известных способа и устройства не дает сопрягаемости с цифровой схемотехникой, цифровыми комплектующими и компьютерами, что требует дополнительных затрат технических средств для организации этого сопряжения.
Известен способ определения КК (2) без организации физического вращения ВЗУР, основанный на генерировании сигнала суммарной частоты вращения ракеты и ротора гироскопа, генерировании опорного напряжения ротора гироскопа и демодуляции СУ с выделением и фильтрацией постоянной составляющей по каналам курса и тангажа связанной с ракетой системы координат.
Известно устройство для определения КК (3), содержащее имитатор цели, генератор суммарной частоты, генератор опорного напряжения ротора гироскопа, 1-й и 2-й амплитудно-фазовый детектор, 1-й и 2-й фильтры низкой частоты, стрелочный индикатор.
Известные способ и устройство предназначены для определения КК в полевых условиях, что является их достоинством. Но они не обеспечивают прямого определения модуля и фазы вектора КК, не обеспечивают достаточного быстродействия режима РМВ и имеют низкую точность измерений, аналоговую идеологию, то есть, сохраняют все недостатки способа (1).
Известно устройство (4) для определения КК, содержащее имитатор цели, перестраиваемый генератор суммарной частоты, генератор опорного напряжения ротора гироскопа, 1-й и 2-й амплитудно-фазовый детектор, микропроцессорный контроллер. Известное устройство имеет автоматизацию измерений, однако хотя фильтрация и выделение постоянной составляющей реализуется в цифровой форме, быстродействие и точность остаются недостаточными для режима измерений в РМВ, так как в устройстве осуществляется методика способа (1) и все его недостатки сохраняются.
Известно устройство для определения КК (5), содержащее имитатор цели, перестраиваемый генератор суммарной частоты, генератор опорного напряжения ротора гироскопа, 1-й и 2-й амплитудно-фазовый детектор, блок определения модуля КК, измеритель частоты, компаратор, дискретный интегратор, сумматор. Известное устройство определяет модуль вектора КК восстановлением его по проекциям на оси связанной с ракетой системы координат, вместо аналоговой фильтрации реализует дискретную, что в известной мере повышает быстродействие, но перемножение СУ с опорным сигналом остается аналоговым в форме амплитудно-фазового детектирования, что снижает точность и быстродействие.
Известен наиболее близкий способ (6) - моего авторства, основанный на закрутке ракеты вокруг оси крена и в плоскости слежения, формировании СУ и подаче его на рулевой привод, формировании квадратурных опорных “меандров” частоты вращения ракеты и синхронно по частоте и фазе вращения ракеты эталонного цифрового сигнала единичного модуля КК в виде последовательности =n счетных импульсов на каждый полупериод вращения с изменением периода их следования по закону: 

Известно наиболее близкое устройство (7) осуществления способа определения КК, которое содержит стенд с двумя приводами вращения ракеты вокруг оси крена и в плоскости слежения, датчик цифровых квадратурных опорных сигналов в виде квадратурных “меандров” частоты вращения ракеты и синхронных по частоте и фазе вращения счетных импульсов с вобуляцией (широкополосное изменение частоты и периода следования) периода повторения по заданному закону (см. л.3), два канала КК по курсу и тангажу, каждый из которых содержит перемножители на элементах ИСКЛ.ИЛИ, триггер, управляемый ключ, демультиплексор, два реверсивных счетчика импульсов, цифровой мультиплексор, блок управления счетчиками, блок управления и обработки данных, при в 1-м и 2-м канале выход генератора опорного «меандра» соединен с входами перемножителя и триггера, генератор счетных импульсов соединен с входом ключа, выход перемножителя с входом управления ключа, выход ключа соединен с входом коммутатора, 1-й выход коммутатора соединен со входом 1-го счетчика импульсов, 2-й с входом 2-го счетчика, выход триггера соединен с входом блока управления счетчиками, 1 - выход блока управления соединен со входом установки суммирующего или вычитающего счета 1-го счетчика, 2-й выход блока управления соединен с аналогичным входом 2-го счетчика, выходы 1-го и 2-го счетчика соединены с 1-м и 2-м входами цифрового мультиплексора, выход триггера также соединен со входом коммутации мультиплексора и входом блока обработки данных, выход мультиплексора соединен с 2-м входом устройства обработки данных.
Наиболее близкие способ и устройство обеспечивают высокие точность и быстродействие измерений в режиме РМВ, сопрягаемость с компьютерами и цифровыми комплектующими, так как значения разбиений пик площадей под полуволнами единичной синусоиды выбирают два в степени (например, 256, 512,1024 …) для упрощения ввода в ЭВМ и для задания требуемой точности измерения КК, которая в наиболее близких способе и устройстве составляет плюс, минус единица счета. А время усреднения наиболее близкие способ и устройство позволяют задавать любое, какое требуется для конкретной ракеты или снаряда в соответствии с их постоянными времени отработки команд. Таким образом, наиболее близкие способ и устройство являются самыми совершенными из всех известных в настоящее время, однако они все же не обеспечивают определение одноканального по своей сущности вектора КК, определяя сначала его проекции по каналам курса и тангажа и затем уже восстанавливая его по полученным проекциям.
Это объясняется тем, что в авиации и ракетной технике до появления вращающихся ракет исторически сложилась связанная система координат стремя осями, крена, курса и тангажа. Но в описанных выше объектах ТО с 5-ю степенями пространственного движения, стабилизированных приданием вращения вокруг оси крена ОГС и АП формируют одноканальный СУ. Это позволило качественно упростить системы стабилизации и управления и создать самые малокалиберные в мире зенитные ракеты, в том числе носимые, резко снизив собственный вес и габариты по сравнению со 6-ти степенными ракетами, стабилизированными оперением. Первые образцы таких ракет “Red -Ai” были созданы в США (г. Сиэтл) и СССР пришлось форсировать работы по созданию аналогичных носимых комплексов ВЗУР и уже в 60-х годах они были созданы. В этой гонке ни в США, ни нам в СССР на ЛОМО и в КБМ, Коломна, некогда было обдумывать очевидный факт, что для вращающихся ракет следует упростить и связанную систему координат, так как излишне в этом случае разлагать вектор УС по осям курса и тангажа и в нашем случае более разумно применять полярную систему координат. Выражаясь другими словами, если мы формируем вектор управляющей силы по одному каналу, зачем разлагать и измерять его, то есть, КК по двум каналам, курса и тангажа? Ведь проще и разумнее это делать также по одному каналу в полярной системе координат. Тем не менее, США в этом типе ТО мы обогнали, создав сначала «Стрелу», а затем «Иглу», которая эффективно действовала на всех ракурсах цели, на любых облачных фонах и при организованном оптическом противодействии со стороны воздушных целей. «Игла» прошла всестороннюю проверку и по эффективности превзошла все зарубежные аналогичные комплексы того времени, включая «Стингер», который не был всеракурсным, имел более низкую помехозащищенность и на порядок меньшую чувствительность в инфракрасном диапазоне.
Целью изобретений способа и устройства для его осуществления является их упрощение и повышение производительности измерений путем определения непосредственно модуля и фазы вектора КК в связанной с ракетой или снарядом полярной системе координат и одновременного определения установочной фазовой ошибки оптико-электронного тракта ракеты или снаряда.
Известно, что в математическом описании любого измерения его можно представить как свертку измеряемого сигнала с аппаратной функцией измерительного устройства. Однако все известные алгоритмы свертки основаны на преобразовании сворачиваемых сигналов и соответственно функций в частотном представлении сигналов, то есть, преобразовании Фурье, перемножении полученных спектров и обратном преобразовании Фурье произведения спектров во временной сигнал (см., например, 8,9). Известные обратные алгоритмы свертки требуют очень большого объема вычислительных операций, затрат аппаратных и программных средств.
Прямые алгоритмы свертки неосуществимы, так как одновременное перемножение и интегрирование результирующего сигнала произведения в РМВ не реализовать. Однако мной предложен и защищен а.с. №305285, СССР способ интегрирования сигналов, по которому не требуется вводить начальные условия интегрирования, они вводятся естественным путем начала суммирующего счета импульсов (когда сигнал и представляющая его функция имеют положительное значение) или вычитающего счета (когда сигнал и его функция имеют отрицательное значение), а точность интегрирования ограничивается только скоростью счета импульсов. Заметим, что в известных традиционных способах численного интегрирования уменьшение шага дискретизации и соответственно повышение точности интегрирования ограничено так называемым “взрывом погрешности”, обусловленным тем, что при постоянном шаге дискретизации сигнала по времени требуется вычислять все разные по площади элементарные площадки, используя метод прямоугольников, трапеций, парабол и т.д. и уменьшение шага имеет предел, вызывая сначала шумы а затем и резкий скачок погрешностей, именуемый «взрывом», и суммируются различные значения, что также более трудоемко, чем счет единиц унитарного кода, который используется при численном интегрировании по способу а.с. №305285. Принимая во внимание выше изложенное, сущность заявленного способа и устройства состоит в следующем.
Указанная цель в способе, основанном на закрутке ракеты или снаряда с угловой скоростью, формировании опорного “меандра” частоты вращения ракеты или снаряда и синхронного по частоте и фазе вращения эталонного цифрового сигнала единичного модуля вектора КК, формировании СУ и подаче его на рулевой привод руль-машинок (РМ), перемножении опорного “меандра” с сигналом РМ, достигается тем, что опорный “меандр” и цифровой сигнал единичного модуля КК формируют только по одному каналу с начальным отсчетом в плоскости ПИР или ПРР, вращают фазу сигнала РМ или совокупности опорного “меандра” и счетных импульсов единичного модуля, заполняют полученные последовательности счетными импульсами в режиме РМВ вращения фазы и одновременно считают их алгебраическим реверсивным счетом, суммируя в интервалах верхнего уровня этих бинарных последовательностей, и вычитая в интервалах низкого уровня, одновременно преобразуя результат счета в уровни полученного сигнала свертки
X(ωt)  sin(ωt), где: ω - угловая скорость вращения ракеты; t - время; X(ωt) - сигнал управления РМ, и определяют модуль КК фиксацией экстремума сигнала свертки, а фазу вектора КК фиксацией угла фазового сдвига относительно выбранного начального отсчета в момент пересечения сигналом свертки нулевого уровня. Таким образом, введение операций вращения фазы сигнала РМ или опорного сигнала, одновременного формирования сигнала свертки, фиксации экстремума сигнала свертки и угла фазового сдвига относительно плоскости начального отсчета позволяет получить заявленный полезный технический результат определения КК по одному каналу в связанной с ракетой полярной системе координат без промежуточных лишних операций определения проекций вектора КК на оси курса и тангажа, и последующего восстановления вектора КК по его проекциям. Справедливости ради отметим, что основную роль здесь играет использование способа интегрирования по а.с. №305285, СССР моего авторства, без применения этого способа интегрирования, при использовании известных до него способов интегрирования, заявленный способ не реализуется.
sin(ωt), где: ω - угловая скорость вращения ракеты; t - время; X(ωt) - сигнал управления РМ, и определяют модуль КК фиксацией экстремума сигнала свертки, а фазу вектора КК фиксацией угла фазового сдвига относительно выбранного начального отсчета в момент пересечения сигналом свертки нулевого уровня. Таким образом, введение операций вращения фазы сигнала РМ или опорного сигнала, одновременного формирования сигнала свертки, фиксации экстремума сигнала свертки и угла фазового сдвига относительно плоскости начального отсчета позволяет получить заявленный полезный технический результат определения КК по одному каналу в связанной с ракетой полярной системе координат без промежуточных лишних операций определения проекций вектора КК на оси курса и тангажа, и последующего восстановления вектора КК по его проекциям. Справедливости ради отметим, что основную роль здесь играет использование способа интегрирования по а.с. №305285, СССР моего авторства, без применения этого способа интегрирования, при использовании известных до него способов интегрирования, заявленный способ не реализуется.
Указанная цель в устройстве, содержащем стенд с 2-мя приводами вращения вокруг оси крена и в плоскости линии визирования, объект самонаведения или ОГС с рулевым приводом, датчик опорных сигналов в виде опорного “меандра” и последовательности счетных импульсов единичного модуля КК, представляющего его в число-импульсном унитарном коде, перемножитель сигнала РМ и опорного “меандра”, достигается тем, что в него введены фазовращатель, блок свертки, задатчик числа циклов свертки, усилитель-ограничитель, фазометр, блок фиксации экстремума сигнала свертки, причем выход датчика опорных сигналов соединен с входом фазовращателя, выход руль-машинок РМ рулевого привода и выходы фазовращателя соединены с входами блока свертки, выход датчика опорного “меандра” соединен 1-м входом фазометра, выход блока свертки соединен с входом блока фиксации экстремума и входом усилителя-ограничителя, выход усилителя-ограничителя соединен с 2-м входом фазометра.
Введение в заявленный способ описанных выше новых операций позволяет определять непосредственно модуль и фазу вектора КК (описано выше л.6). При этом если совместить угол начального отсчета «меандра» соответствующим угловым положением датчика опорных сигналов относительно риски ПИР, значение фазы КК будет соответствовать и значению установочной фазовой ошибки (УФО). Таким образом, заявленный способ повышает производительность измерений параметров объекта, определяя одновременно три параметра. В идеальном случае УФО должна равняться нулю. Это будет означать, что вектор УС расположен точно в плоскости вращения линии визирования. Но в реальности в оптико-электронном тракте ОГС и ракеты в целом существуют фазовые ошибки, например, вызванные некоторым разбросом положения полюсов ротора-магнита гироскопа при неточной его ориентации при намагничивании, большинство фильтров электронного тракта ОГС имеют фиксированные настройки, но частоты вращения ротора гироскопа могут немного отличаться, применение синхронных фильтров дает автоматическую подстройку частоты фильтра, но при этом также вносятся фазовые ошибки и т.д. Поэтому определение УФО имеет также важное значение, допустимое значение УФО не более 20, далее вероятность промаха резко увеличивается, так как ракета все более отклоняется от оптимальной траектории самонаведения в точку встречи движений цели и ракеты.
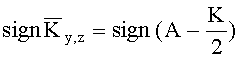
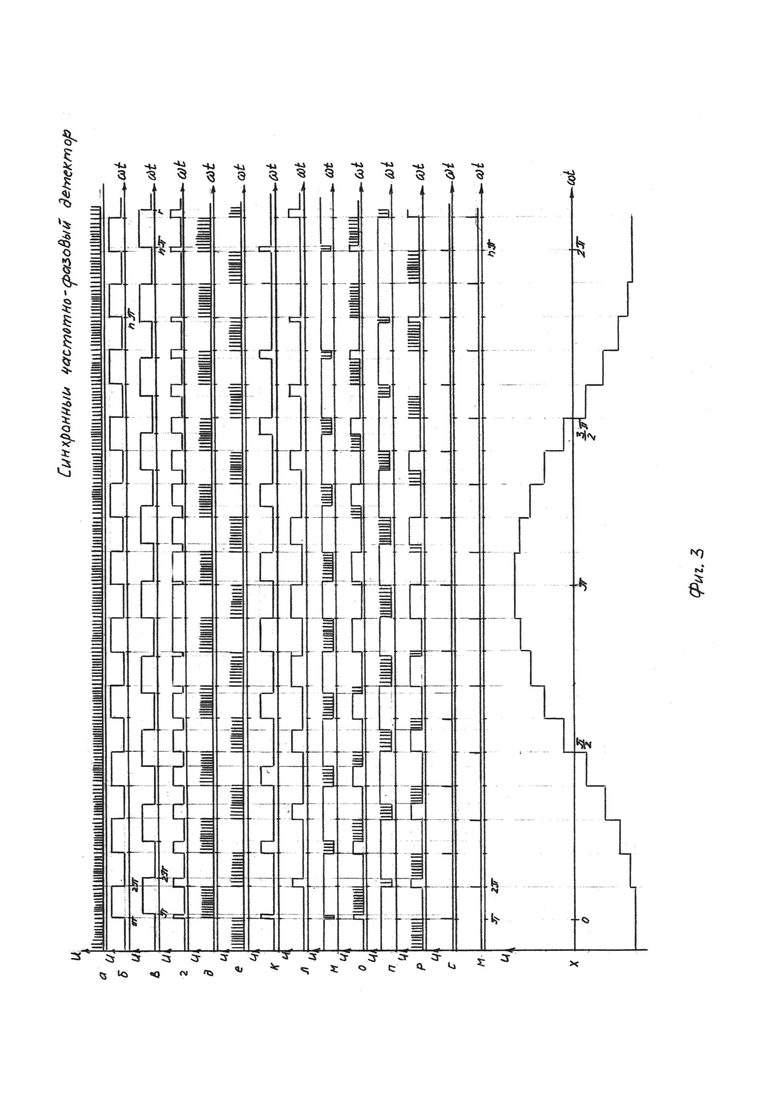
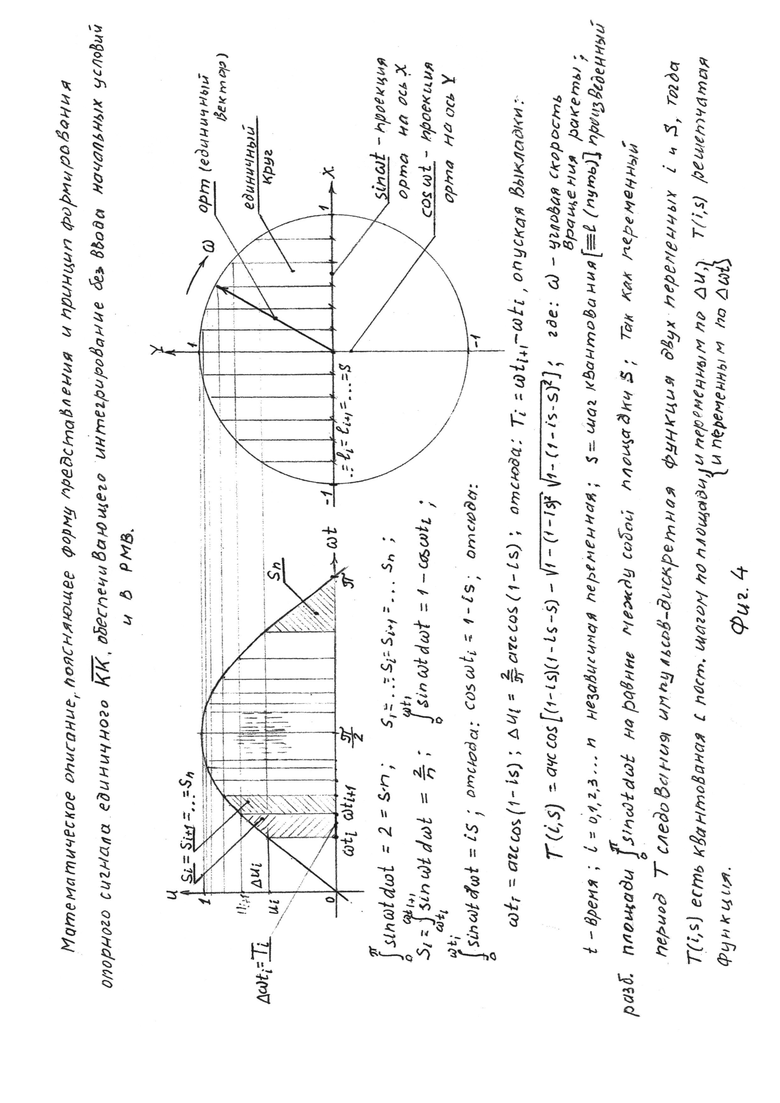
На Фиг.1 представлена укрупненная функциональная схема устройства для осуществления способа, на Фиг.2 - структурная схема блока свертки, на Фиг.3 - временные диаграммы обработки сигналов в блоке свертки, на Фиг.4 - математическое описание, поясняющее представление единичного модуля КК в виде число-импульсного кода, полученного квантованием площади под единичным сигналом sin ωt с постоянным шагом s по площади (в известных цифровых представлениях дискретизацию сигнала производят с постоянным шагом по времени или по уровню), что в физическом представлении есть дискретизация с постоянным шагом по пути (независимая переменная - аргумент) и переменным по времени (функция). То есть, используется смена ролей координат задания сигнала, а если перейти к пределу, время становится переменным.
На Фиг.1 показаны: контрольно-поверочный стенд 1-1; датчик 1-2 опорных сигналов; вращающиеся контактные устройства 1-3, 1-4; имитатор 1-5 цели; нормирователи 1, 2 уровней; фазовращатель 3, блок 4 свертки; задатчик 5 числа циклов свертки; усилитель ограничитель 6; фазометр 7 и блок 8 фиксации экстремума сигнала свертки.
Устройство для осуществления заявленного способа определения КК, представленное на Фиг.1 работает следующим образом. 1-й привод закручивает объект самонаведения вокруг оси крена ОХ, а 2-й вокруг оси OZ в плоскости вращения линии визирования. Сигнал РМ и опорные сигналы через ВКУ 1-3 и 1-4 поступают на входы нормирователей уровней 1 и 2, которые верхний (единицы) и нижний уровень (нуля) приводят к стандартным значениям. Далее опорные сигналы поступают на входы фазовращателя 3 и с его выходов на входы блока 4 свертки, а сигнал РМ поступает на 3-й вход блока 4, который формирует сигнал свертки. Сигнал свертки поступает на вход усилителя-ограничителя, который из аналогового сигнала выделяет знаковый бинарный сигнал, который поступает на вход фазометра 7, на 2-й вход фазометра 7 поступает сигнал опорного “меандра”, начальная фаза которого соответствует плоскости вращения лв. Фазометр 7 измеряет сдвиг фазы между сигналом свертки (моментом пересечения им нулевого уровня) и опорным “меандром”. Это значение соответствует фазе КК и УФО. Сигнал свертки также поступает на вход блока 8 фиксации экстремума, значение уровня которого определяет модуль КК. На задатчик 5 поступает сигнал свертки, на нем можно установить число циклов сворачивания от одного и более.
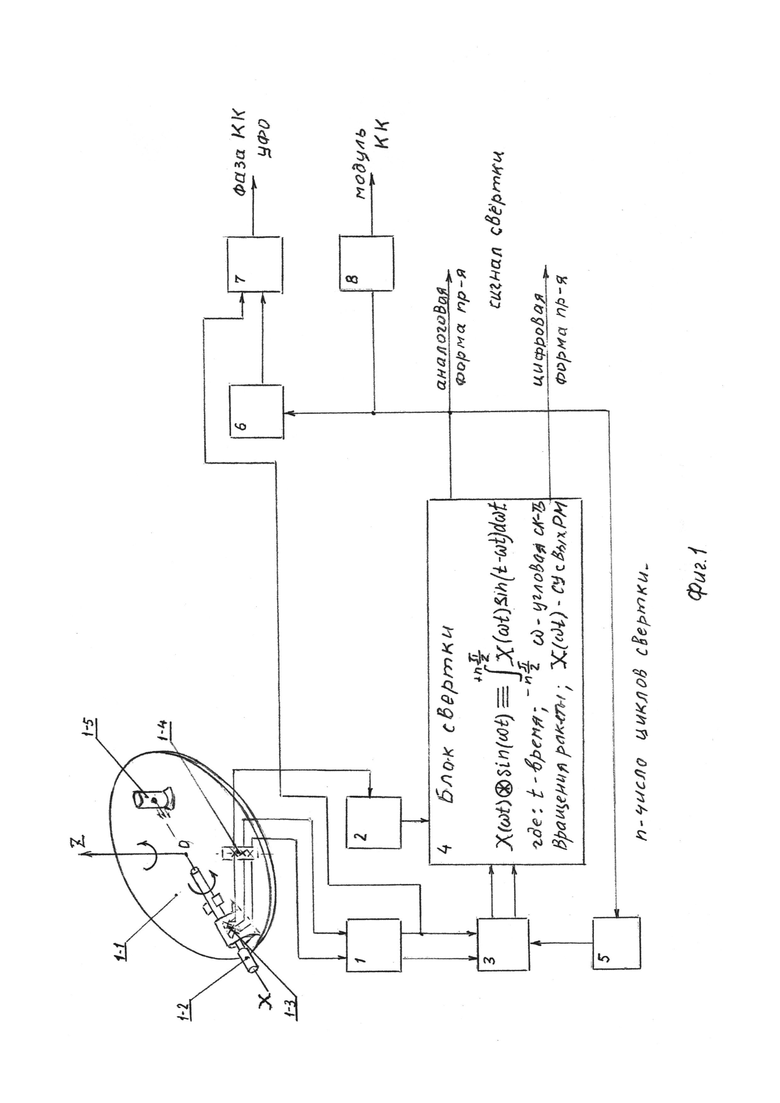
Блок свертки, представленный на Фиг.2, содержит элемент 1 ИСКЛ.ИЛИ, демультиплексор 2, коммутирующий бинарные последовательности на входы блоков 4 и 5 управления счетчиками импульсов 11, 12, демультиплексор 3, коммутирующий последовательность счетных импульсов на вторые входы счетчиков импульсов 11, 12, блоки 4, 5 управления реверсивными счетчиками 11, 12 импульсов, счетчики 11, 12 импульсов, регистры 9, 10 начальных условий счета, цифровой мультиплексор 13, 4-х квадрантный ЦАП 14, ФНЧ 15. Работа блока свертки поясняется временными диаграммами на Фиг.3
После перемножения опорного “меандра” и сигнала РМ на выходе элемента 1 ИСКЛ.ИЛИ формируется бинарный сигнал, коэффициент заполнения которого пропорционален текущему относительному набегу фазы между входными сигналами. Демультиплексоры 2 и 3 управляются по входам выборки адреса опорным бинарным сигналом б. Для задания переменного коэффициента преобразования бинарный сигнал с выхода элемента 1 ИСКЛ.ИЛИ заполняется по 2-м каналам вобулированными счетными импульсами. В соответствии с логикой переключения демультиплексоров 2 и 3 счетные импульсы нечетных полупериодов поступают на вход блока 5 управления (сигнал е), а счетные импульсы четных на вход блока 4 управления (сигнал д). При этом одновременно импульсы нечетных полупериодов сигнала г поступают на второй вход блока 5 управления, а четные на второй вход блока 4 управления. Структура блоков управления 4, 5 счетчиками 11, 12 выполнена соответствующим образом для сопряжения с ними и организации реверсивного счета импульсов. В соответствии с логикой управления счетчик 12 импульсов считает алгебраические суммы счетных импульсов в нечетных полупериодах сигнала г, а в четных сохраняет значения результатов счета. Счетчик 11 наоборот считает в четных полупериодах сигнала г, а в нечетных сохраняет значения результатов счета. Так как режим суммирующего счета задается высоким уровнем сигнала г, а вычитающего низким уровнем, то с учетом переменного коэффициента преобразования, обусловленного вобуляцией счетных имульсов и изменением коэффициента заполнения, результаты алгебраических сумм сигнала г есть текущие интегралы результатов одновременного перемножения и параллельного интегрирования сигнала РМ с представленным таким образом опорным сигналом единичной синусоиды, то есть, текущие уровни сигнала свертки в виде ступенчатой квантованной функции. На регистрах 9, 10 начальных условий устанавливают в двоичном дополнительном коде значения нулевого уровня сигнала. После каждого цикла счета и сохранения алгебраической суммы счетных импульсов предшествующего периода счетчик 11 сбрасывается и устанавливаются начальные условия счета короткими импульса и сигнала с. Циклы работы счетчика 12 сдвинуты по фазе относительно циклов счета счетчика 11 на период. Эти циклы задаются короткими импульсами сигнала м. Так как сигналы с выходов счетчиков 11 и 12 на линии информационных входов X1 и Х2 противофазно относительно логики управления по входу выборки адреса, на выходе цифрового мультиплексора 13 формируется цифровой сигнал в двоичном дополнительном коде в виде запаздывающих на период ступенек текущего уровня сигнала свертки. Этот сигнал поступает на вход 4-х квадрантного ЦАП 14, где превращается в аналоговый ступенчатый сигнал х свертки, ступеньки которого сглаживаются фильтром 15. Блок 3 служит для установки счетчиков в исходное состояние при включении питания и записи начальных условий счета, заданных на регистрах (наборные поля 9, 10) начальных условий счета реализуются на типовых известных схемах. Инвариантность принципа относительно систем отсчета позволяет вращать фазу либо опорного сигнала, либо сигнала управления (РМ). Точность сворачивания и соответственно точность определения компонентов вектора КК и УФО задается выбором числа шагов квантования 2m=256, 512, 1024 и т.д. площади под полуволной единичной синусоиды (см. Фиг.4).
Заявленные технические решения способа и устройства, как многократно показано в тексте описания, обладают новизной, имеют изобретательский уровень и промышленную применимость. В настоящее время неизвестна аппаратная и предполагаю (так как я не программист и не слежу за новинками в этой области) программная реализация свертки сигналов по прямому алгоритму. Заявленные способ и устройство кроме обозначенных полезных эффектов обеспечивают полную автоматизацию процесса измерений, что тоже важно, сопрягаются с цифровыми комплектующими и приемами цифровой схемотехники. Так как любое измерение есть свертка измеряемого сигнала с аппаратной функцией измерительного устройства, они имеют универсальное значение и могут найти применение и в других областях нестандартных измерений для подвижных вращающихся объектов другого рода или для объектов с подвижными вращающимися источниками воздействий и т.п.
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. СССР, а.с. №25984 - аналог способа; 2. СССР, а.с. №59292 - аналог способа; 3. СССР, а.с. №67184 - аналог устройства; 4. СССР, а.с. №176399 - аналог устройства; 5. СССР, а.с. №210307 - аналог устройства; 6. СССР, а.с. №263567 - прототип способа; 7. СССР, а.с. №265527 - прототип устройства; 8. “Микропроцессорные системы автоматизации технологических процессов” Тезисы докладов Всесоюзной научно-технической конференции 14-16 апреля 1987 года, г. Новосибирск, “Эффективный алгоритм быстрой свертки 2-х последовательностей длиной N”. 9. Нуссбауэр Г. “Быстрое преобразование Фурье и алгоритмы вычисления сверток”, М., Радио и связь, 1985; 10. Красовский А.А. и др. “Основы теории и проектирования вращающихся одноканальных управляемых ракет”, ВВИА им. Жуковского, 1963; 11. Халк Р.А. и др. Разработка полуактивной лазерной системы наведения снаряда «Копперхэд», Ракетная техника и космонавтика, Т.18, №2, февраль 1980, стр.128-138. 12. Технические описания комплексов 9К32 и 9К38, Оборонгиз.
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ СОКРАЩЕНИЙ
1. TO - точное оружие; 2. TP - техническое решение; 3. ВЗУР - вращающаяся зенитная управляемая ракета; 4. ВУАС - вращающийся управляемый артиллерийский снаряд; 5. ОЭСК - оптико-электронный следящий координотор; 6. ОЭСС - оптико-электронная следящая система; 7. ОГС - оптическая головка самонаведения; 8. СЭА - система электрического арретирования; 9. АП - автопилот; 10. РМ - руль-машинка; 11. PMB - реальный масштаб времени; 12. УС - управляющая сила; 13. СУ - сигнал управления; 14. КК - коэффициент команды; 15. УФО - установочная фазовая ошибка; 16. ω Лв - угловая скорость вращения линии визирования; 17. ООП - организованное оптическое противодействие; 18. ЦАП - цифроаналоговый преобразователь; 19. ФНЧ - фильтр низкой частоты; ПИР - плоскость идеальных рулей; ПРР - плоскость реальных рулей.
Группа изобретений относится к способу определения коэффициента команды одноканальных вращающихся ракет и снарядов и устройству для его определения. Для определения коэффициента команды закручивают ракету или снаряд вокруг оси крена в плоскости слежения за имитатором цели. Формируют сигнал управления на рулевой привод руль-машинки (РМ). Формируют опорный сигнал по определенному закону, вращают фазу опорного сигнала или сигнала РМ, перемножают опорный сигнал и сигнал РМ, заполняют полученный после перемножения сигнал счетными импульсами. Формируют сигнал свертки определенным образом. Определяют модуль коэффициента команды фиксацией экстремума сигнала свертки, а фазу - фиксацией угла фазового сдвига между опорным сигналом и сигналом сверки в момент пересечения им нулевого уровня. Устройство для определения коэффициента команды содержит приводы вращения ракеты вокруг оси крена, датчик опорного сигнала и последовательности счетных импульсов, фазовращатель, блок свертки с перемножителем, усилитель-ограничитель, фазометр, блок фиксации экстремума сигнала свертки, соединенные определенным образом. Обеспечивается упрощение измерений коэффициента команды и фазовой ошибки ракеты или снаряда. 2 н. и 1 з.п. ф-лы, 4 ил. 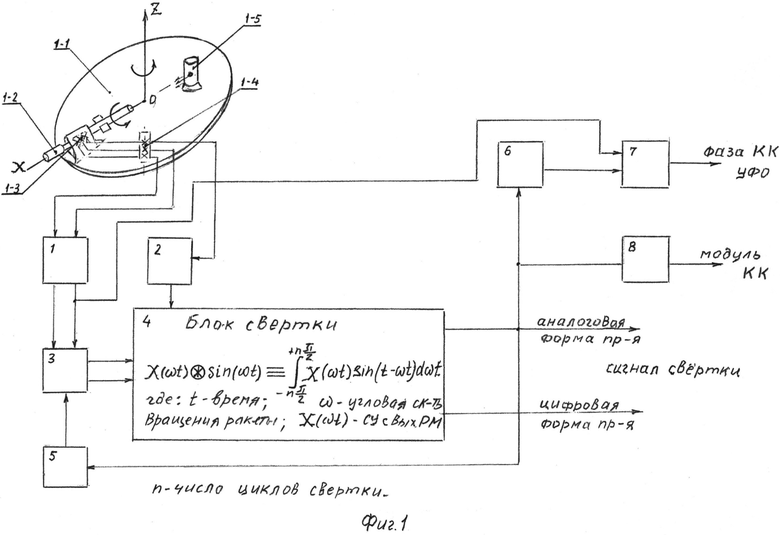
1. Способ определения коэффициента команды одноканальных вращающихся ракет и снарядов, основанный на закрутке ракеты или снаряда вокруг оси крена с угловой скоростью и в плоскости слежения за имитатором цели, формировании сигнала управления и подаче его на рулевой привод руль-машинки (РМ), формировании опорного сигнала единичного модуля коэффициента команды в виде совокупности опорного «меандра» с начальной фазой в плоскости идеальных рулей и последовательности счетных импульсов с изменением периода следования по закону: 

2. Устройство для определения коэффициента команды ракеты или снаряда с релейным рулевым приводом, содержащее приводы вращения ракеты вокруг оси крена и в плоскости слежения за имитатором цели, датчик опорного «меандра» и синхронной по частоте и фазе вращения последовательности счетных импульсов, представляющих в число-импульсном унитарном коде единичный модуль вектора коэффициента команды, перемножитель сигнала управления, поданного на руль-машинки (РМ), и опорного «меандра», отличающееся тем, что, с целью упрощения и повышения производительности измерений, в него введены фазовращатель, блок свертки, усилитель-ограничитель, фазометр, блок фиксации экстремума сигнала свертки, причем перемножитель введен в блок свертки, выходы датчика опорных сигналов соединены с входом фазовращателя, выходы фазовращателя соединены с входами блока свертки, выход РМ соединен с третьим входом блока свертки, выход датчика опорного «меандра» соединен с первым входом фазометра, выход блока свертки соединен с входом блока фиксации экстремума и входом усилителя-ограничителя, выход усилителя-ограничителя соединен с вторым входом фазометра.
3. Устройство по п.2, отличающееся тем, что выход РМ соединен с входом фазовращателя, выход фазовращателя соединен с входом блока свертки, выходы датчика опорных сигналов соединены с входами блока свертки.

