стью токоограпнчения вследствие неидеальности сравнивающих элементов (диодов).
Целью изобретения является повышение стабильности и точности токоограничения.
Поставленная цель достигается тем, что в каждый канал управления введен нульорган, в один из каналов - инвертор и источник смещения, общий на два канала, при этом входы каждого из введенных нульорганов соединены соответственно с выходом ГПН, с выходом синхронизатора, с выходом источника смещения и с выходом датчика ЭДС двигателя, причем вход одного н)ль-органа соединен с выходом датчика ЭДС непосредственно, а вход второго - через инвертор, выходы же введенных нульорганов соединены со входами соответствующих нуль-органов фазосмещаюо его устройства.
Такое устройство обладает повышенной стабильностью и точностью токоограничения вследствие того, что в нем амплитудный способ ограничения диапазона изменения углов отпирания вентилей в функции сигнала датчика ЭДС двигателя заменен фазовым, который не требует наличия балансного усилителя постоянного тока и сравниваюU.UIX диодов. Если в известном устройстве, ограничение максимальных углов отпирания вентилей осуществляется путем ограничения максимальных значений соответствующих сигналов управления фазосмещающими устройствами, то в предлагаемом устройстве это достигается путем ограничения прямого хода пилообразного напряжения, действуюшего на входах нуль-органов ФСУ. С этой целью с помощью введенных нульорганов формируются специальные импульсы ограничения максимальных углов, длительность которых, а значит, и длительность прямого хода пилообразного напряжения, зависит от величины сигнала ЭДС двигателя.
Изобретение обеспечивает также расширение диапазона токоограничения в электроприводах с ШРШ. Это достигается тем, что в каждый канал устройства введены двухтактный триггер / 5-типа и схема отрицания, а в синхронизатор введен канал выработки двух дополнительных импульсов. При этом информационные входы каждого из введенных триггеров соединены с выходами введенного канала дополнительных импульсов синхронизатора, а тактовые входы один непосредственно, а другой через схему отрицания - с выходом соответствующего нуль-органа. Выходы триггеров соединены со входами соответствующих нульорганов и, кроме того, - с логической частью системы управления преобразователем.
Такое устройство обеспечивает ограничение тока якоря на любом заранее заданном уровне вследствие того, что в режиме торможения при значениях l .ц
(т. е. при которых в режиме торможения противовключением ток якоря будет превышать заданный уровень) тормол ение осуществляется с помощью режима регулируемого динамического торможения (РДТ), который позволяет ограничить ток якоря на уровне меньшем, чем бд тах/Ля.ц. Это видно из уравнения тока в данном режиме
J ея-(1-т)
г -
R,
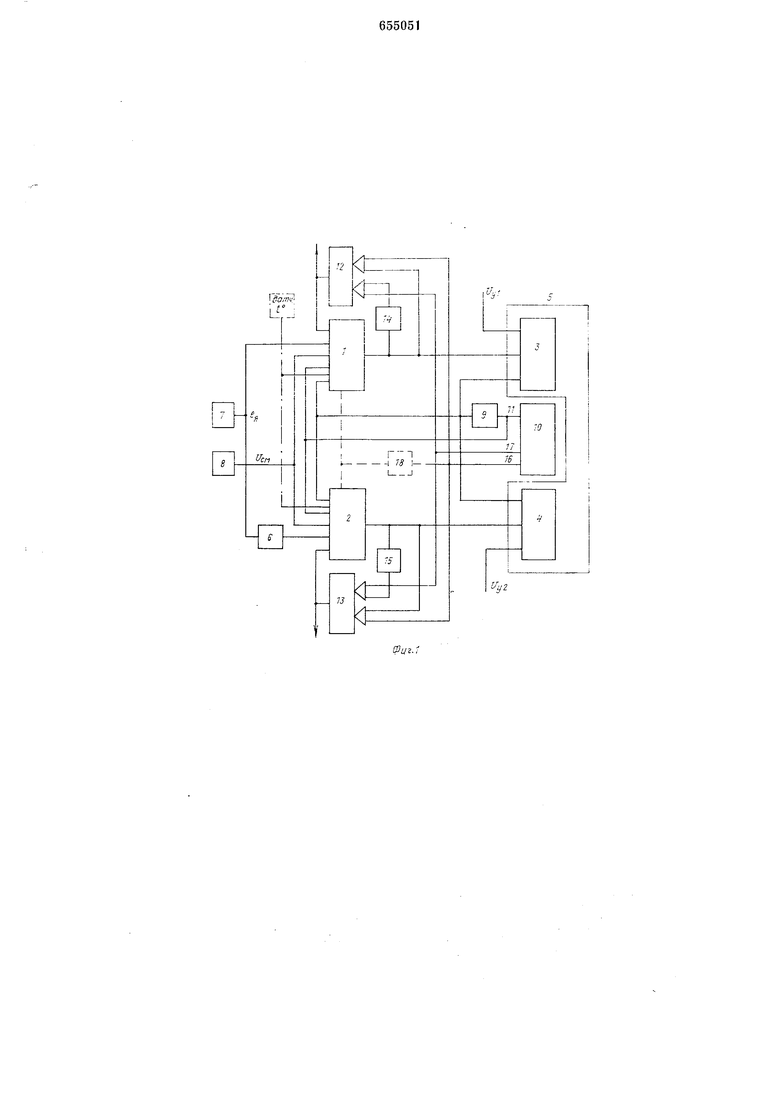
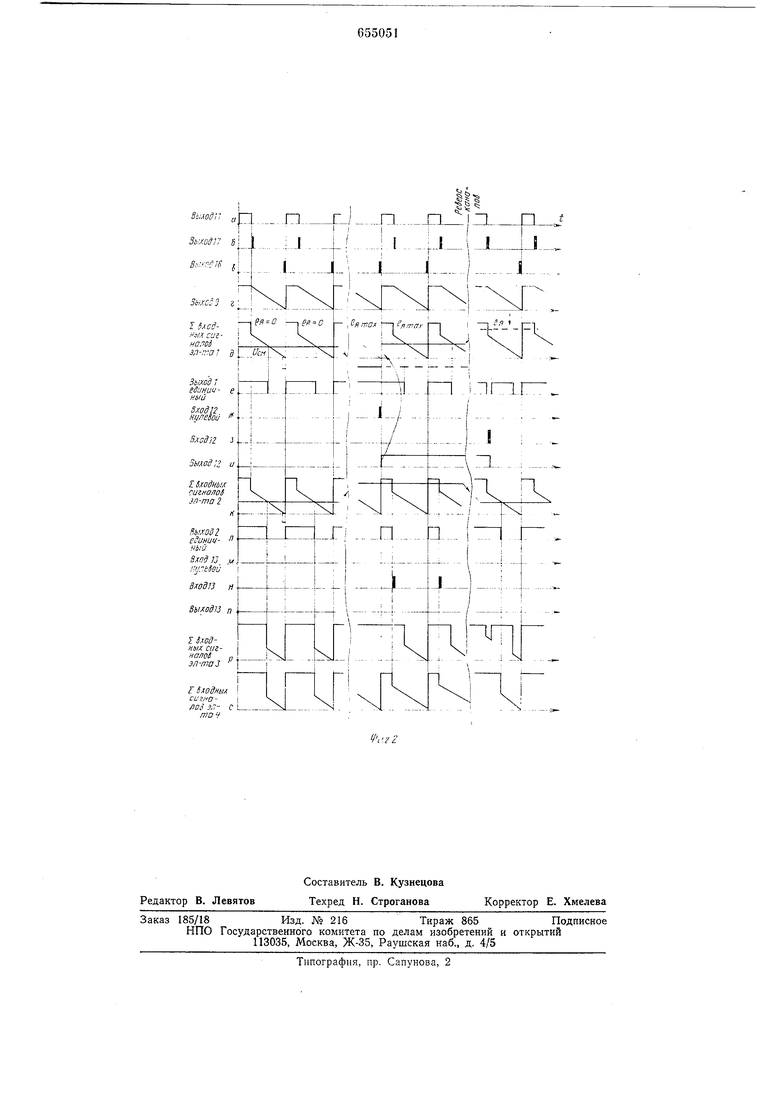
На фиг. 1 изображена схема устройства; на фиг. 2 - диаграммы напряжений, поясняющие работу устройства.
Устройство осуществляет токоограничение при работе, электропривода как «Вперед, так и «Назад и в соответствии с этим выполнено в виде двух каналов, каждый из которых содержит нуль-орган (НО) 1, 2 выработки импульса ограничения максимального угла отпирания вентилей и нуль-орган 3, 4 фазосмещающего устройства (ФСУ) 5, а один из каналов содержит еще и инвертор 6. Кроме того, в устройство входят датчик
ЭДС двигателя 7, источник смещения 8, генератор пилообразиого напряжения (ГПН) 9 и синхронизатор 10 выработки тактовых импульсов (выход 11), общие на два канала. При этом входы нуль-органа 1 и 2 соединены соответственно с выходом НПН 9, с выходом И синхронизатора 10, с выходом источника 8 и с выходом датчир.а ЭДС двигателя 7, нричем вход НО 1 непосредственно, а вход НО 2 - через инвертор 6. Выходы нуль-органов 1 и 2 соединены со входами НО 3 и 4 соответственно, другие входы которых подключены к выходу ГПН 11 и к источнику управляющих сигналов.
Устройство включает в себя, кроме того, два двухтактных триггера RS-типа 12, 13, две схемы отрицания 14, 15 и канал формирования двух дополнительных импульсов в синхронизаторе 10 (выходы 16, 17). Информационные входы триггеров 12, 13 соединены с выходами 16, 17 синхронизатора 10. Тактовые входы этих триггеров соединены с выходами нуль-органов 1 и 2 соответственно, причем единичный тактовый
вход - непосредственно, а нулевой - через схему отрицания 14 и 15 соответственно. Выходы триггеров 12 и 13 соединены со входами нуль-органов 1 и 2 соответственно и, кроме того, поступают на вход логической части системы управления преобразователем (не показанной на схеме). В устройство также введен инвертор 18.
Устройство работает следующим образом.
Нуль-орган 1 и 2 вырабатывают импульсы ограничения максимального угла отпирания вентилей (фиг. 2е, л), которые, суммируясь на входах нзль-органов 3 и 4 ФСУ 5 с сигналом ГПН определяют длительность прямого хода опорного напряжения,
т. с. диапазон изменения углов отнирания вентилей (фиг. 2,р, с).
Формирование импульсов ограничения максимального угла отпирания вентилей в функции сигнала датчика ЭДС двигателя производится с помощью НО 1 и 2, которые изменяют свое состояние при изменении знака суммы входных сигналов (фиг. 1,д, е, к, «).
При , длительность импульса ограничения максимального .угла отпирания вентилей Гогр определяется напряжением источника смещения 8 17см (фиг. 2,д, е, к, л).
При увеличении вя длительность импульса ГОГР работающего канала/выход НО 2 или 1 уменьщается до минимальной величины (фиг. 2,к,л), определяемой длительностью тактового импульса (фиг. 2,а), а диапазон изменения угла отпирания вентилей работающего канала увеличивается до максимального (фиг. 2,с). Неработающий канал в это время подготавливается к работе. Длительность импульса Гогр этого канала (выход НО 1 или 2) увеличивается (фиг. 2,е), уменьщая диапазон изменения угла отпирания вентилей (фиг, 2, р).
При реверсировании каналов управления будет работать ранее неработавщий канал (нуль-органы 1 или 2, 3 или 4), обеспечивая сначала режим торможения противовключением и далее разгон в двигательном режиме. При этом длительность импульсов ограничения максимальных углов отпирания вентилей этого канала (выход нуль-органа 1 или 2) будет уменьщаться, обеспечивая поддержание тока якоря на уровне, равном уставки токоограничения. Длительность импульсов ГОГР неработающего канала при этом будет увеличиваться.
Таким образом, введением в устройство упреждающего токоограничения двух нульорганов, источника смещения и инвертора и организацией выщеупомянутых связей обеспечивается ограничение тока якоря двигателя на заданном уровне, причем это достигается путем ограничения «прямого хода пилообразного напряжения на входах нуль-органов ФСУ с помощью специальных импульсов, что не требует балансного усилителя н сравнивающих диодов. В результате этого- повыщается стабильность и точность токоограничеиия.
Описанное устройство, так же как и прототип, при использовании его в электроприводах с щиротно-импульсными преобразователями (ШИП) .может обеспечить ограничение тока якоря только на уровне больщем, чем величина еятах/- я.ц. (как правило, эта величина примерно равна /к.з.). т. е. ограничение тока с помощью этого устройства возможно лищь на уровне от .. до 2/к.з. Это вызвано тем, что данное устройство обеспечивает торможение двигателя только в режиме противовключения, при котором
ток якоря не может оыть меньще, чем вса
личина Действительно, среднее значе я.ц.
кие тока якоря в этом режиме определяется выражением
г + РЯ
- R
я.ц.
где Y - скважность, относительная длительность подключенного состояния двигателя к источнику питания; И - напряжение источника питан1 Я.
Из описанного выражения видно, что ограничение тока якоря в этом режиме путем соответствующего ограничения максимальных углов отпирания вентилей (скважности) возможно только на уровнях /яогр
SnjRn.n., т. е. только на уровнях больще, чем ij/к.з.. Если в данном устройстве установить уставку уровня токоограничения /тп ея .ц., ТО при реверсировании (или при торможении) с максимальной скорости (или с любой другой, но больщей скоростью,
при которой /то-- я.ц. ток якоря будет поддерживаться на уровне уставки токоограничения только при . На участке
же снижения ЭДС (скорости) от бятах ДО
ея1ток якоря будет превыщать уставку токоограничения, снижаясь от величины /я еятах/ я.ц./к-з При максимальной скорости, до величины
/ - - /
я - D .Ц,
Двухтактный триггер 12 (13) каждого канала осуществляет формирование логического сигнала динамического торможения (фиг, 2,и). Наличие этого сигнала соответствует величине ЭДС якоря Этот
сигнал поступает в логическую часть устройств управления преобразователем для изменения алгоритма управления вентилями преобразователя соответствующего канала с целью организации режима регулируемого динамического торможения. Кроме того, этот же сигнал подается на вход нульоргана 1 (2), скачком изменяя длительность импульса ограничения максимальных углов отпирания вентилей (или для ШИП -
скважности) от максимального значения до минимального (фиг. 2, и, д, е) и наоборот (фиг. 2, I, д, е), обеспечивая тем самым постоянство уровня токоограниченпя при смене режимов торможения (так, при ,1
в режиме торможения противовключением длительность имиульса ограничения максимальной скважности Гогр должна быть максимальной и равной периоду, а в режимы РДТ при этом Лче значении вя длительность
импульса ГОГР должна быть минимальной и равной ГОГР mm) Опрокидывание триггера 12 (13) осуществляется следующим образом. При совпадении тактируемого импульса
(импульс с выхода нуль-органа 1 на фиг. 2,е)
и информационного импульса (импульс с выхода 16 синхронизатора 10, который предшествует тактовому импульсу, фиг. 2,а, в) на единичном входе триггера 12 (фиг. 2,ж), он переходит в единичное состояние (фиг. 2,м). При совпадении же тактируемого импульса (импульс со схемы отрицания 14) и информационного импульса (импульс с выхода 16 синхронизатора 10, следующий сразу же за тактовым, фиг. 2а, б) на нулевом входе триггера 12 (фиг. 2,з) он переходит в нулевое состояние. Другими словами, триггер опрокидывается в «единицу при стремлении длительности импульса TOI-P (выход нуль-органа 1) к максимальному значению, что соответствует стремленщо максимальной скважности к «нулю, а в нуль - при стремлении длительности импульса ГОГР к своему минимальному значению. Параметры схемы при этом настраиваются таким образом, что моменты опрокидывания триггера соответствуют величине ЭДС якоря двигателя, равной
я Я1 - .ц.
Тогда при значениях совпадений импульсов на единичных входах триггеров не будет, и триггеры будут находиться в нулевом состоянии, а npii значениях торможение будет осуществляться в рен{Име динамического торможения, так как соответствующий триггер при этом будет находиться в единичном состоянии (фиг. 2,и). Торможение будет продолл аться до тех пор, пока вя не снизится до величины и триггер не перейдет в нулевое состояние.
Таким образом, введение в устройство двух двухтактных триггеров / 5-типа, схемы отрицания и канала выработки двух дополнительных импульсов в синхронизатор и организация вышеописанных связей обеспечивает достижение ноставленной цели - расширение диапазона токоограничения в электроприводах с ШИП.
Формула изобретения
1. Устройство упреждающего токоограничения, содержащее синхронизатор выработки тактовых импульсов, соединенный с генератором пилообразного напряжения, выход которого подключен ко входам двух нульорганов фазосмещающего устройства, другой вход каждого из которых подключен к источнику управляющих сигналов, и датчик ЭДС двигателя, отличающееся тем, что,
с целью повышения стабильности и точности токоограничения в каждый канал управления введен нуль-орган, в один из каналов - инвертор и источник смещения, общий на два канала, при этом входы каждого из введенных нуль-органов соединены соответственно с выходом генератора пилообразного напряжения, с выходом синхронизатора, с выходом источника смещения и с выходом датчика ЭДС двигателя, причем
вход одного нуль-органа соединен с выходом датчика ЭДС непосредственно, а вход другого - через инвертор, выходы же введенных нуль-органов соединены со входами соответствующих нуль-органов фазосмещающего лстройства.
2.Устройство по п. 1, отличающееся тем, что, с целью расширения диапазона токоограничения в электроприводах с широтно-импульсными преобразователями, в каждый канал управления введены схема отрицания и двухтактный триггер RS-тииа, а в синхронизатор введен канал выработки двух дополнительных импульсов, при этом информационные входы каждого из введенных триггеров соединены с выходами введенного канала дополнительных импульсов синхронизатора, причем один из тактовых входов непосредственно, а другой - через схему отрицания соединены с выходом соответствующего нуль-органа, выходы же триггеров соединены со входами соответствующих нуль-органов и с логической частью системы управления преобразователем. Источники информации,
принятые во внимание при экспертизе
1. Гольц М. Е. и др. Автоматизированные электроприводы постоянного тока с широтно-импульсными преобразователями. М., «Энергия, 1972, с. 61-79.
2. Каган В. Г. и др. Нелинейные системы с тиристорами. М., «Энергия, 1968, с. 28- 35.
3.Козин В. М., Марченко Я. Е. Управляющие устройства тиристорных преобразователей для электроприводов постоянного тока, М., «Энергия, 1971, с. 49-52.
I |J°.
КГ::
П

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| Устройство для управления электроприводом постоянного тока по системе "управляемый вентильный преобразователь-двигатель | 1981 |
|
SU983957A2 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Устройство для раздельного управления реверсивным тиристорным преобразователем | 1987 |
|
SU1503055A1 |
| Способ регулирования вентильного электропривода постоянного тока | 1976 |
|
SU657556A1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Электропривод | 1985 |
|
SU1272449A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Способ формирования сигнала разрешенного диапазона углов включения вентилей в ведомых сетью вентильных преобразователях переменного тока в постоянный | 1990 |
|
SU1734163A1 |
| Устройство для управления тиристорным преобразователем | 1980 |
|
SU936357A1 |