(54) РЕВЕРСИ РЕГУЛИРОВ Изобретение относится к области вентильного электропривоаа (ВЭП) и преоназначено для регулирования частоты вращения электродвигателя постояяного тока. Известны структуры овухэониого ВЭП с реверсом поля электродвигателя, сооер жащие нереверсивный якорный преофазователь с системой управления напряжения якоря, реверсивный тиристорный возбудитель с системой управления тока возбуждения, электродвигатель, датчик частоты вращения, блок логики раздельного управления комплектами возбудителя. Регулирование напряжения якоря двигателя осуществляется по системе подчиненного регулирования. На входе регулятора частоты вращения суммируются сигналы задания и обратной связи по частоте вращения. Для -Ъсуществления торможения, как и для реверса, изменяется знак выходного сигнала регулятора частоты вращения, что воздейст вует на систему управления возбуждения Й ЭЛЕКТРОПРИВОД С ДВ ЕМ ЧАСТОТЫ ВРАЩЕНИЯ и реверсирует ток возбуждейия--НЕг В результате ЭДС двигателя меняет знак, тиристоры якорного преобразователя переводится в инверторный режим и осуществляется рекуперативное торможение двигателя. Указанный электропривод обладает рядом недостатков: 1. Подключение системы управления возбуждением к выходу регулятора частоты вращения (канал регулирования напряжения двигателя) ухудшает устойчивость и снижает быстродействие электропривода, так как выходной сигнал регулятора частоты вращения, являющийся задакяднм сигналом для канала регулирования возбуждения (поля) двигателя, зависит от управляющих и возмущающих воздействий обоих каналов регулирования. При этом в двухйонных электроприводах с реверсом поля корректирующая RC-цепь усилителя регулятора частоты вращения выбирается такой, чтобы выходной сигнал усилителя не изменял поляр- HOCть при перерегулированиях в пусковых режимах или в режиме сброса нагрузки; в противном случае изменяется знак iBfeixboHorb напрйх(ения усилителей регулятора частоты ;; ращения, меняется поле двигателя, увеличивается .,.время регулирования. В результате прихоцится существенно аагрублять коррекцию регулятора частоты вращения по сравнению с однозонным электроприводом (в котором отсутст вует регулирование поля), что резко снижает быстродействие двухзонного электро привода, особенно при работе в первой зоне с постоянным- возбуждением, соответствующей регулированию частоты вращения двигателя от нуля до номинального значения. 2.Подключение входа блока логики к выходу регулятора частоты вращения снижает быстродействие электропривода. Это объясняется тем, что команда на переключение на вход блока логики поступает не после изменения сигаала ошибКя, а толькр после переключения выходного сигнала регулятора частоты вращения, как правило охваченного коррекцией и имеющего низкое быстродействие. Использование в качестве датчика истинного значения тока возбуждения транс форматоров тока аце более усугубляет описанный недостаток и снижает надежность вэа 3.Существенным недостатком данного ВЭП является отсутствие контура регулирования ЭДС двигателя, что не позволяет поддерживать ЭДС двигателя на заданном уровне и ограничивать ее максимальное значение. Поэтому в ВЭП в переходных режимах ..возможны аварийные режимы, в частности прорыв и опрокидывание инвертора. Наиболее близким к изобретению по те нчческой сущности является электропривод, состоящей из переверсивного жо ного преобразователя с системой управления напр51жения якоря и реверсивного тиристорного возбудителя с системой управления тока возбуждения Введением контура регулирования ЭДС двигателя с обратной связью пЬ напряжению, переключаемой подключенным к тахогенератору нуль-органом, ликвидирован основ ной недостаток вышеописанной системы ВЭП. Но данный электропривод, как и выше указанное устройство, имеет тот недоста что управление возбуждением осуществля ся В функции полярности выходного сигнала регулятора частоты вращения, что выполняется за счет соединения выхода регулятора частоты вращения через нуль-орган и потенциометр со входом системы управМния возбудителя. Даже незначительные изменения частоты вращения в переходнь1х процесса приводят к изменению поляр- ности выходного сигнала регулятора частоты вращения, реверсированию нуль-органа и, соответственно, изменению возбуждения двигателя. Этот недостаток приводит к увеличению переходных процессов а в ряде случаев - к потере устойчивости. Вторым недостатком является подключение блока логики к выходу регулятора ЭДС, вход5вцего в состав системы управления возбудителя. Это снижает быстродействие электропршода, так как реверсирование дёигателя начинается толысо после снижения до нуля выходного напряжения регулятора ЭДС, как правило: имеющего корректирующие звенья и низкое быстродействие; Целью изобретения является повышение устойчивости и быстродействия электропривода за счет обеспечения режимов электрического подтормаживания двигателя только при значительных отклонениях частоты вращения от заданной величины, а э.леКтрического торможе- ния и реверсирования двигателя - при любьа уровнях частоты вращения. Поставленная цель достигается тем, что реверсивный электропривод с двухзонным регулированием частоты вращения, содержащий питающий якорь электроивигателз, нереверсивный тиристорный преобразователь, в цепь управления кото- , рого включен регулятор частоты вращения с подключенными к его входам задат«шком и датчиком частоты вращения, второй из которых через нуль-орган соединен с управляющим входом блока переключения о атной связи по ЭДС, вход которого подключен к выходу нереверсивного преобразователя, а выход - ко входу реверсивного преобразователя, питающего обмотку возбуждения электродвигателя, блок регулирования возбуждения с подключенными к нему блоком логики и датчиком состояния вентилей, и второй нуль-орган, введены два не-. линейньсх звена с характеристиками типа зона нечувствительности и насыщение, входы которых подключены к датчику частоты вращени$1, а выходы - к двум входам
второго нуль-органа, третий вход которого соецинен с зацатчиком частоты вращения, а выход - со входом блока логики.
В укачестве второго нелинейного звена может быть использован диодный ограничитель регулятора частоты вращения.
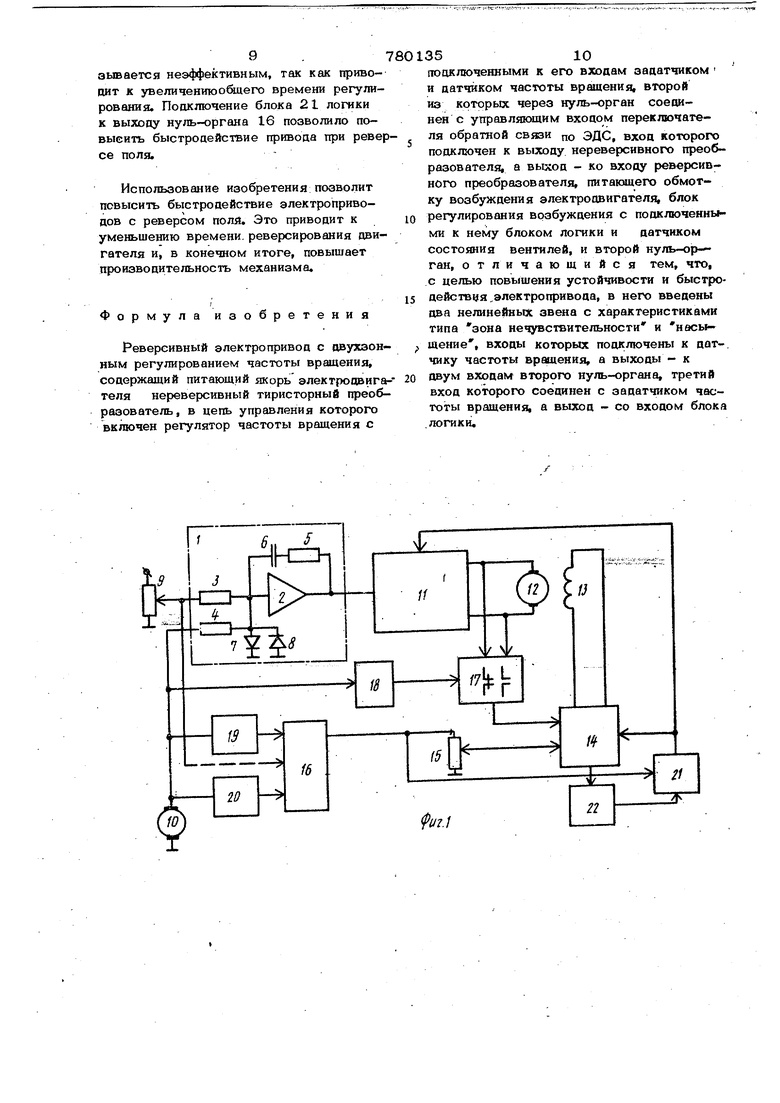
На фиг. 1 приведена схема электропривода;«на фиг. 2 - диаграммы, пояснякмдие его работу..
В данном устройстве входы регулятора 1 частоты вращения, содержащего усилитель 2, резисторы 3-5, конденсатор 6, диодный ограничитель с диодами 7 и 8 подключены к задатчику 9 частоты вращения и датчику 1О частоты вращения а выход - к системе управления якорного преобразователя 11. На выход преобразователя 11 подключен электродвигатель 12 а обмотка 13 возбуждения двигателя на выход преобразователя 14. Входы системы управления преобразователя 14 соединены, соответственно, через потенциометр 15, являющийся задатчиком ЭДС, с с выходом нуль-органа 16, с выходом переключателя 17 обратной связи по ,ЭДС двигателя, входы которого подключены к выходу якорного преобразователя II, а переключение контактов осуществляется подключенным к датчику 10 частоты вращения нуль-органом 18. Входы нуль-органа 16 подключены непосредственно на выход задатчика 9 частоты вращения и через нелинейные звенья 19 и 20 к датчику 10. Блок 21 логики подключен к выходу задатчика ЭДС двигателя 15 и при наличиисИгналаразрешенияот датчика 22. состояния вентилей в соответствии с полярностью сигнала задатчика 15 выбирает требуемое направление вр ения, воздействуя на систему управления якорного преобразователя 11 и преобразователь 14.
Рассмотрим работу электропривода в следующих режимах:
а) Пуск на номинальную скорость {работа в 1-ой зоне).
При подаче задающего напряжения на задатчик 9 на выходе регулятора 1 и нуль-органа 16 появляются сигналы. Пол5фность выходного сигнала нуль-органа 16 определяет срабатывание трехпозиционного блока 21 логики из нулевого положения в одну из позиций, например на вращение двигателя влево. (Блок 21 логики имеет следукмцие позиции: О (нулевое);вращение двигатели вправо или влево). В функции сигналов блока 21 лоп1ки срабатывают следукяцие ключи . в системах управления якорного гфеобразователя II и преобразователя 14, которые обеспечивают прохои дение сигнала с задатчика 15 ЭДС на вход преобразователя 14 и выходного сигнала регулятора 1 на вход якорного преобразователя II, В результате происходит нарастание тока возбуждения и напряжения на якоре двигателя до номинальных ведичин. В процессе пуска ток якоря ограничивается устройством токоограничения, входяаим в состав преофазователя II, и двигатель разгоняется до номинальной частоты вращения. При этом сигналы на входе нуль-органа 16 устанавливаются до значений, указанных на фиг. 3 а (здесь У Ux, 40 °ДУЛИ напряжений, соответственно, на выходе
задатчика 9 и нелинейных звеньев 19 и 20, характеристики которых в функции частоты вршцения двигателя 12 приведены на фиг. 3 б).
Нелинейное звено 19 имеет характеристику типа зона нечувствительности . Уровень зоны выбирается пропорциональным допустимой величине абсолютного значения динамической ошибки по частоте врш1).енн1ц т.е. по допустимому перерегулированию при пуске, реверсе, сбросе и т.ц.. В пределах этой динами- ческой ошибки относительно инерционный канал регулирования возбуждения двигателя не должен оказьшать регулирующее воздействие, в противном случае увеличивается общее время регулирования частоты вращения двигателя. Нелине ное звено 2О имеет характеристику типа насыщение. Уровень напряжения насыщоу ,ниявыбираетсяизусловия обеспечения торможения двигателя вплоть до малых скоротей. В случае появления перерегулировани частоты вращения (скорости) двигателя при пуске происходит следующее:
- если модуль перерегулирования скорости
1iHlHti(t)-n,J,
где уст. - установившееся значение частоты вращения, соответствукяцее задающему напряжению U ® превосходит зоны нечувствительности |ди) , определяемой сигналами |4U lUq|-lU)hUid (l)
то электрическое торможение двигателя отсутствует;если перерегулирование частоты вршцения велико и
Кп17|ли1.(2)
то происходит электрическое пoдтop Jaживание двигателя. При этом на выходе
нуйь-бргана 16 изменяется полярность и преобразователь 14 блоком 21 логики переключается на противоположное направление работы - происходит реверс тока возбуждения в обмотке 13, ЭДС
двигателя 12 изменяет знак и осуществляет электрическое то| можение с переходом преобразователя 11 в инверторный реим и рекуперацией энергии двигателя в сеть. Торможение гфоисходит, пока вы- ю гголняется условие (2). При ДЩ { оисходит переключение блока 21 логики в прежнее положение, и ток возбуждения вбсстанавливает свой) прежнюю (заданную) полярность} 15
б) Торможение с номинальной скорости. При торможёййй 0 О сигналы Urtft опрёдел5аот йояй нЬстъ выходного напряжения нуль-органа 16, и блок 21 р ерсирует ток возбужйения и ЭДС дай- 20 гателя. В результате происходит торможение с рекуперйкйей эйергйи в сеть, аналогично ььйнеиэл женному. Характерной особенностью данного длектропривода является то, что, несмотря на наличие 25 зоны нечувствиГельйости, определяемой звеном 19, электрическое торможение ftpofeKae вплоть До очень низших скоростей. Этот эффект за авенй
20 ((|ИГ, 3 6) высоких скорое Т;ЯХ30
двигателя напряжение аатшка 10 частоты вращения ёеликй, в результате- на йуль-орган 16 воздействуют оба сигнала J л и U По . При сйижений скорости до уровня DO сигнал Um О и 35 удержание Нуль-органа 16 в прежнем сос тоянийосуществляется сигналом ttg величина которого мала (ОД-О,58), в Реверс на скорости выше основной.
При реверсировании задающего аапрянсе%, Ц
ния U сигналы
JO Ь{фецеляют
полярность BtctdfiHoro нагфяжейия нуль-органа 16, и блок 21 логики реверсирует ток возбуждения и ЗДС двигателя, ПрокЬ- 5 ходит электрическое торможение двигателя 12 с переходом якорного преобразователя 11 в инверторный режим и рекуперацицией энергий двигателя в сеть. При изменении полярности сигнала тахогенератора при помощи переключателя 17 происходит переключение обратной .связи по ЭДС двигателя. Вначале происходит нарастание напряжения на якоре и частоты вращения Двигателя до номинальных значе- jj НИИ, затем до заданной частоты вращения при ослаблении поля с поддержанием ЭДС даигателя ECOVt t во второй зоне. Поддержание ЭДС fe-CO«st осуществляется имеющимся в системе управления возбудителя 18 регулятора ЭДС.
В целом процесс реверса включает в себя процессы торможения и пуска. Выше в пп. а), б) была рассмотрена работа нелинейных звеньев 19 и 20 в режимах пуска и торможения. Поэтому в случае перерегулирования частоты вращения двигателя при пуске, торможении и реверсе на скоростях выше основной, работа нелинейнь1х звеньев 19 и 20 и реверса в целом аналогична вышеизложенной.
Следует отметить, что данный электропривод может выполняться и без переключателя 17, но с сохранением алгоритма работы за счет введения других элементов.
В ряде случаев звено 20 может быть исключено, а его функции совмещены с диодным ограничителем 7 и 8 регулятора I, Тогда при торможении ( |}л О особенно в зоне малых скоростей двигателя, когда U.jrt О, на вход нуль-органа 16 поступает сигнал датчика 10 через резисторы 3 .и 4|при этом его максимальная величина ограничена падением напряжения на диодах 7 и 8. Такое совмещение возможно при определенных iBeличкнах резисторов 3 и 4,
Данный электропривод обеспечивает электрическое торможение даигателя вплоть до нулевого значения частоты вращения, а под1х рмаживание лишь при из- м нений задающего сигнала на величину пр ышающую зону нещпастительности. При этом торможение обеспечивается (при отключении задающего напрдасения) эа счет нелинейного звена с характеристикой типа насыщение, В результате, несмотря на наличие зоны нечувствительности при подторМажиВанйи, для тормозHbix режимов последняя исключается, и торможение имеет место при любых уровиях. чостоты вращения двигателя. При это по сравнению с известными приводами данный электропривод имеет более высокое быстродействие и большие области устойчивости, так как управление полем не определяется пол ностью входного напряжения регулятора I, которая может изменяться при малых значениях по абсолютной величине перерегулирова-. ния скорости. Это позволяет в данном электроприводе иметь легкую корректирукшую RC-цепь (элементы 5 и 6), В прототипе использование такой коррекции приводило к реверсированию поля; которое при малых уровнях скорости аывается неэффективным, так как приво оит к увеличениюо&цего времени регули рования. Пооключение блока 21 логики к выходу нуль-органа 16 позволило повысить быстродействие привода при рев се поля, Использование изобретения позволит повысить быстродействие электроприводов с реверсом поли. Это приводит к уменьшению времени, реверсирования дви гателя и, в конечном итоге, повышает производительность механизма. /.. Формула изобретения Реверсивный электропривод с двухзон ным регулированием частоты вращения, содержащий питающий якорь электродвига теля нереверсивный тиристорный преоб разователь, в цепь управления которого включен регулятор частоты вращения с 3510 годключенными к его входам задатчиком и датчиком частоты вращения, второй из которых через нуль-орган соединен с управляквдим входом переключателя обратной связи по ЭДС, вход которого подключен к выходу нереверсивного преобразователя, а выход - ко входу реверсивного преобразователя, питающего обмотку возбуждения электродвигателя, блок регулирования возбуждения с подключенными к нему блоком логики и датчиком состояния вентилей, и второй нуль-ор ган, отличающийся тем, что, с целью повышения устойчивости и быстродействия,электропривода, в него введены два нелинейных звена с характеристиками типа зона нечувствительности и насыщение, входы которых подключены к датчику частоты вращения, а выходы - к двум второго нуль-органа, третий вход которого соединен с задатчиком частоты вращения, а выход - со входом блока логики.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Двухзонный электропривод постоянного тока | 1979 |
|
SU836747A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Устройство для управления электроприводом с двухзонным регулированием | 1978 |
|
SU780133A1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |

lUI
jV
n
Ui
SnoKC 0
L
- n
