ными нуль-органом и формирователем импульсов синхронизации в каждом из каналов, разделительный трансформатор, первичные фазные обмотки которого соединены в треугольник и подключены К, йитаюгчей сети, а вторичные соединены в звезду и подключены к соответствующим парам нуль-органов, одного для положительных, а другого для отрицательных значений соответствукицего линейного напряжения питающей сети в каждой паре, управляемый шестибитный регистр на шести элементах 2И с шестибитными информационными входом и выходом и входом управления 1к шестибитному: элемент бИ-НЕ, причем выходы нуль-огановподключены к шестивходовый информационному входу управляемого регистра, выход которого подсоединен к информационному выходу блокам, вход управления которого соединен с входом управления регистра, при этом выходы .нуль-органов через соответствунядие формирователи импульсов синхронизации связаны с
входами элемента 6И-НЕ, выход которого подсоединен к импульсному выходу блока.
3. Устройство по ПП.1 и 2, отличающееся тем, что блок счетчиков тактовых импульсов содержит два нереверсивных вычитающих счетчика тактовых импульсов анодной и катодной групп мостового вентильного преобразователя соответственно, блок управления счетчиками и блок определения приоритета счетчиков, причем вход тактирования блока подсоединен к счетным входам счетчиков, кодовые входы которых подключены соответственно к первому и второму информационным входам блока счетчиков, управляющий вход которого связа через блок управления счетчиками с входами записи кода, сброса и разрешения счета счетчиков, выходы которы подключены к соответствующие входам блока определения приоритета счетчиков, выход которого подсоединен к импульсному выходу блока счетчиков.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2064730C1 |
| Микропроцессорное устройство для управления вентильным преобразователем | 1985 |
|
SU1356155A1 |
| Устройство для управления вентильным преобразователем | 1984 |
|
SU1205243A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Устройство для управления вентильным преобразователем | 1988 |
|
SU1677819A1 |
| РЕГИСТРАТОР АВАРИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ЭНЕРГОСИСТЕМ | 2009 |
|
RU2402067C1 |
| Электропривод постоянного тока | 1990 |
|
SU1798881A1 |
| Цифровое устройство для управления преобразователем частоты с непосредственной связью и однократной модуляцией | 1983 |
|
SU1164838A1 |
| Способ комплексного определения теплофизических характеристик материалов и устройство для его осуществления | 1986 |
|
SU1381379A1 |
1.УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ, содержа щее задающий генератор тактовых импульсов, микропроцессорный вычисйительный блок, включающий в себя микропроцессор с двумя входами прерьшания, праграммно-задающий блок, блок параллельного ввода и два блока параллельного вывода информации, блок распределения отпираюп1их импульсов, выходы которого предназначены для подключения к управляющим электродам вентилей преобразователя, а входы подключены к выходам первого блока выв.ода информации, блок нуль-органов и регистратора полярностей фаз трехфазной питающей сети, входы которого : подсоединены к питающей ceTij, содержащий шестибитный информационный и импульсный выходы, отличающ е ее я тем, что, с, целью расширения функциональньк возможностей устройства путем сокращения машинного времени, затрачиваемого микропроцессором на управление углом отпирания вентилей, оно снабжено блоком счетчиков тактовых импульсов с входом тактирования, импульсным , выходом, двумя информахщонными и одним управляющим входами, блок нульорганов и регистратора полярностей фаз снабжен входом управления, nprfчем шестибитный информа1щонный выход блока нуль-органов и регистратора полярностей фаз подключен к информационному входу блока ввода информации, управляющий выход которого подсоединен к входу управления блока нуль-органов и регистратора полярностей фаз, импульсный выход которого , (О подключен через блок ввода информас: ции к первому ВХОГ1У прерываний микропроцессора для запуска подпрограммы обслуживания прерываний от «ynj -opraнов, информационные и управляющие вы ходы второго блока вывода инЛоомации подсоединены соответственно к первому и второму информационным и управляющим входам блока счетчиков, О) вход тактирования которого подключен, к выходу задающего генератора такто00 вых импульсов, а импульсный выход к второму входу прерываний микропроцессора для запуска, подпрограммы обслуживания прерываний от счетчиков тактовых импульсов. 2. Устройство по П.1, отличающееся тем, что блок нуль-органов и регистратора полярностей фаз содержит шесть каналов преобразования информации о состоянии полярностей фаз напряжений трехфазной питающей сети с последовательно соединен
.1
Изобретение относится к злектроте нике, а именно к управлению вентильными преобразователями, работающими от сети переме°нного тока, с использованием методов цифровой обработки информации, и может быть применено в регулируемом электроприводе постоянного тока.
Известно устройство для управления тиристорным преобразователем, содержащее генератор тактовых импульсов, нуль-органы, счетчики тактовых импульсов, преобразователи входного аналогового сигнала в код, логические блоки и схемы сравнения кодов и вьщачи сигналов на включение вентилей в момент равенства кодов tl3Недостатками этого устройства являются наличие преобразователей аналогового сигнала в код и электрон ная перестройка частоты генератора тактовых импульсов, что снижает его точность.
Наиболее близким по технической сущности к изобретению является устройство для прямого цифрового управления с помощью микропроцессора дуальным тиристорным преобразователем переменного тока в постоянный, содержащее микропроцессор, программнозадающее устройство, внешние часы, .датчик нуля тока, устройство ввода для синхрбнизации с сетью трехфазного тока, устройство вывода для управления тиристорами, моностабильньй селекторов блок усиления и распределения отпирающих импульсов C2J.
Недостатком известного устройства является наличие моностабильного селектора и внешних часов, используемых для организации опроса микропроцессором устройства ввода с некоторой достаточно высокой частотой, что приводит к снижению точности регулирования напряжения и тока вентильного преобразователя. Другим недостатком является использование одного из внутренних регистров микропроцессора в качестве счетчика для отсчета углов отпирания вентилей тиристорного моста Это приводит к загрузке микропроцессора непроизводительной работой в
качестве счетчика импульсов и, следовательно, сужает возможности использования микропроцессора для расчета, выбора и реализации различных законов управления вентильньа4 преобразователен.
Цель изобретения - распмрение функциональней возможностей устройства путем сокращения малинного времени
затрачиваемого микропроцессором на упавление углом отпирания вентилей.
Поставленная цель достигается тем, что устройство для управления вентильным преобразователем, содержащее задающий генератор тактовых импульсов, микропроцессорный вычислительный блок, включающий в себя ьшкррпроцессор с двумя входами прерывания, программно-задающий блок,блок параллельного ввода и два блоки параллельного вывода информации, блок распределения отпирающих.импульсов, выходы которого предназначены для подключения к управляющим, электродам вентилей преобразователя, а входы подключены к в.ыходам первого блока вьгаода информации, блок нуль-органов и регистратора полярностей фаз трехфаз-ной питающей сети, входы которого под соединены к питающей сети, содержащий шестибитАый информационный и импульсный выходы, снабжено блоком счетчиков тактовых импульсов с входом тактирова ния, импульсным выходом, двумя инфор мащюнными и одним управляющим входами, блок нуль-органов и регистратора полярностей фаз снабжен входом управления, причем шестибитный информационный выход бЬюка нуль-органов и регистратора полярностей фаз подключен к информационному входу блока ввода информации, управлякщий выход которого подсоединен к входу управления блока нуль-органов и регистратора полярностей фаз,импульсный выход которого подключен через блок ввода информации к первому входу прерываний микропроцессора для запуска подпрограммы обслуживания прерьшаний от нуль-органов, информационные и управляющий выходы второго блока вывода информации подсоединены соответственно к первому и второму информационньв4 и управляющему входам блока счетчиков, вход тактирования которого подключен к выходу задающего генератора тактовых импульсов, а импульсный выход - к второму входу прерываний микропроцессора для запуска подпрограммы обслуживания прерываний от счетчиков тактовых импульсов.
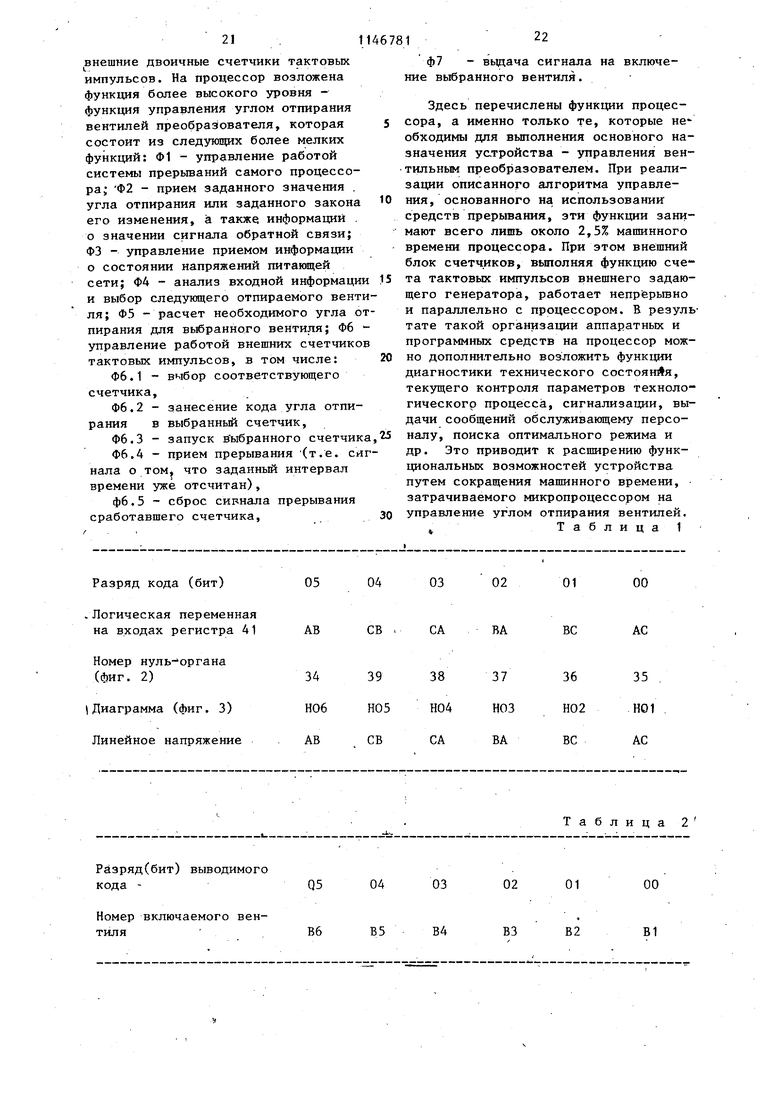
Блок нуль-органов и регистратора полярностей фаз содержит шесть каналов преобразования информации о состоянии полярностей фаз напряжений трехфа.зной питающей сети с последовательно соединенными нуль-органом и формирователем импульсов синхронизации в каждом из каналов, разделительный трансформатор, первичные фазные обмотки которого соединены в треугольник и подключены к питающей се.ти, а вторичные соединены в звезду и подключены к соответствующим парам нуль-органов, одного для положительных, а другого для отрицательных значений соответствующего линейного напряжения питающей сети в каждой паре, управляемый шестибитный регистр на шести элементах 2Ис шестибитными информатдюнными входом и выходом управления и шестивходовый элемент 6ИНЕ, причем выходы нуль-органов подклю чены к шестибитному информационному входу управляемого регистра, выход которого подсоединен к информационному выходу блока, вход управления которого соединен с входом управления регистра, при этом выходы нуль-органов через соответствующие формирователи импульсов синхронизации связаны с входами элемента бИ-НЕ, выход которого подсоединен к импульсному выходу блока.
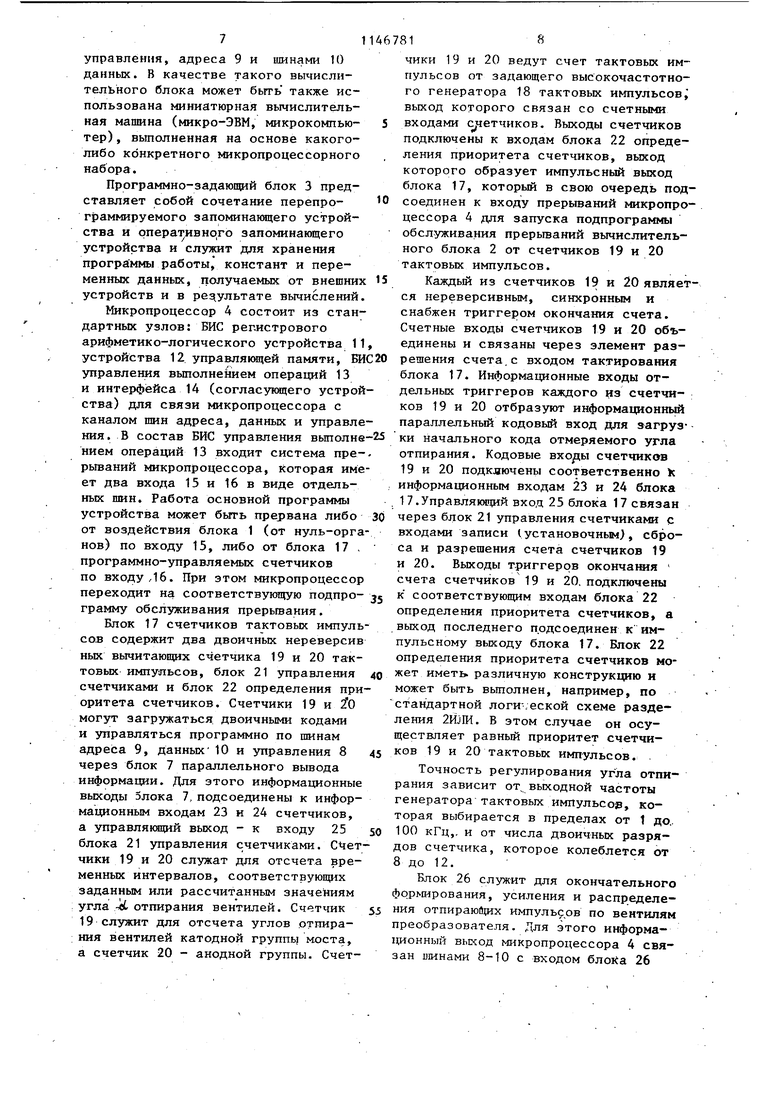
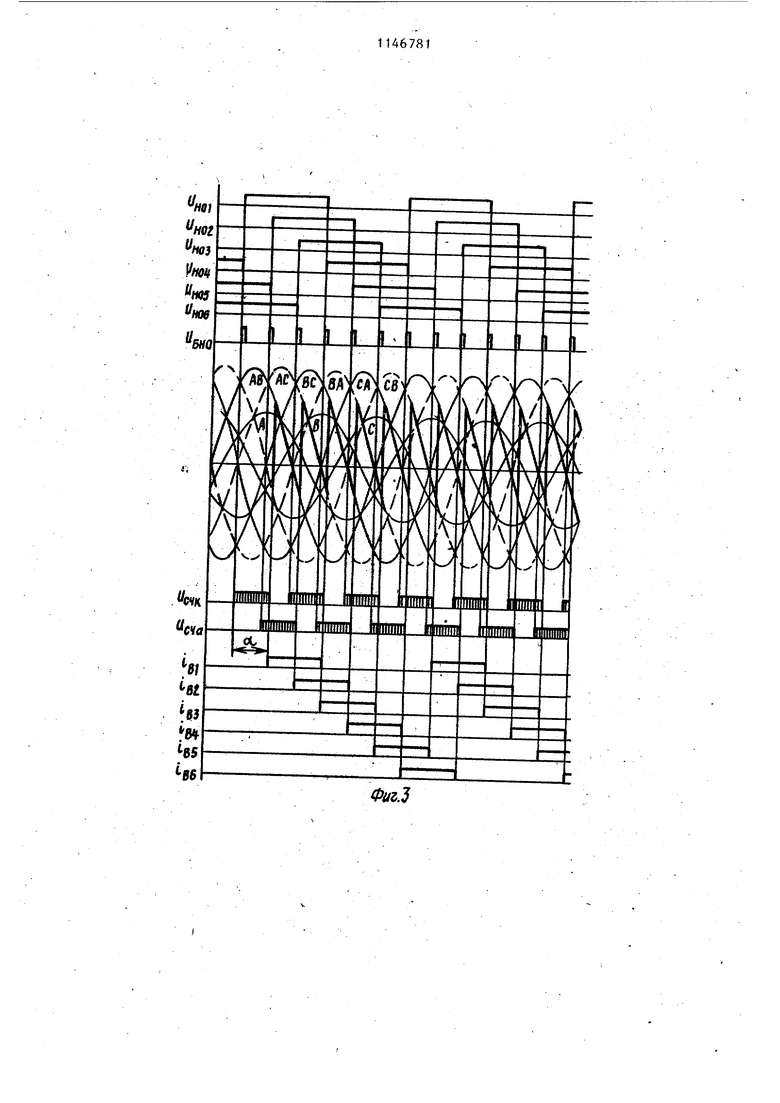
Блок счетчиков тактовых импульсов содержит два нереверсивных вычитающих счетчика тактовых импульсов анодной и катодной групп мостового вентильного преобразователя соответственно, блок управления счетчиками и блок определения приоритета счетчиков, причем вход тактирования блока подсоединен к счетным входам счетчиков, кодовые входы которых подключены соответственно к первому и второму информационным входам блока счетчиков, управляющий вход которого связан через блок управления счетчиками с входами записи кода, сброса и разрешения счета счетчиков, выходы которых подклю чены к соответствующим входам блока определения приоритета счетчиков, выход которого подсоединен к импульсному выходу блока счетчиков. На фиг. 1 приведена функциональная схема устройства для управления трехфазным мостовым вентильным преобразователем; на фиг. 2 - принципиальная схема блока нуль-органов и регистратора полярностей фаз; -на фиг. 3 - временные диаграммы напряжений и токов, поясняющие работу устройства; на фиг. А - структурные схемы алгоритмов основной части управляющей программы и подпрограмм обслуживания прерьгоаний. Устройство содержит блок 1 нульорганов и регистратора полярностей фаз трехфазной питающей сети, микропроцессорный вычислительный блок 2 (управляющая микро ЭВМ, микрокомпьютер), программно-задающий блок 3, микропроцессор 4 с системой прерываний, блок 5 параллельного ввода информации, блоки 6 и 7 параллельного вывода информации, тины 8 управления пшны 9 адреса, шины 10 данных, ариф метико-логическое устройство 11 мик ропроцессора, устройство 12 управля ющей памяти микропроцессора, устрой ство 13 управления выполнением операций микропроцессора, интерфейс 14 микропроцессора, вход 15 прерьгоания микропроцессора от блока нуль-органов и регистратора полярностей фаз, вход 16 прерывания микропроцессора от блока счетчиков, блок 17 счетчиков тактовых импульсов, задающий ге нератор 18 тактовых импульсов,счетчики 19 и 20 тактовых импульсов катодной и анодной групп вентильного преобразователя соответственно, бло 21 управления счетчиками, блок 22 определения приоритета счетчиков, информационные входы 23 и 24 блока счетчиков, управляющий вход 25 бло. ка счетчиков, блок 26 распределения отпирающих импульсов, информационнь выход 27 блока нуль-органов и регис ратора полярностей фаз, канал 28 для ввода информации о заданном зна чении угла отпирания, канал 29 для ввода дискретного сигнала обратной связи, импульсньй выход 30 блока нуль-органов и регистратора полярно тей фаз, выход 31 прерывания блока параллельного ввода информации, управляющий вход 32 блока нуль-орга нов и регистратора полярностей фаз, разделительный трансформатор 33, каналы 34-39 преобразования информа ции о состоянии полярностей фаз напряжений трехфазной питающей оети, шёстивходовый логический элемент 6И- НЕ 40, управляемый регистр 41, разделительньй диод 42, резисторы 43 и 44, опорный диод 45, базовый 46 и коллекторный 48 резисторы усилителя-нормализатора, резистор 47 смещения усилителя-нормализатора, транзисторы 49, конденсатор 50, резистор 51 дифференцирующей цепи, разделительный диод 52, базовый 53 и коллекторный 54 резисторы. Транзистор 55, вход 56 управ ления регистром 41, нулъ-орган 57 с усилителем, формирователь 58 импульсов синхронизации. Устройство предназначено для цифрового микропроцессорного управления вентильным преобразователем. Силовая часть вентильного преобразователя представляет собой выпрямительный шестивент.ильный мост, состоящий из анодной и катодной групп управляемых вентилей, например тиристоров (фиг.1) Зажимы переменного тока моста подключены к трехфазной сети. Выпрямительный мост питает в общем случае активно-индуктивную с противо-ЭДС нагрузку. Так как все вентили моста управляемые, мост является полностью управляемым и симметричным. Управляю- щие электроды тиристоров присоедине ны к соответствующим выходам блока распределения отпирающих импульсов предлагаемого устройства. Входной информацией для предлагаемого устройства служат линейные напряжения трёхфазной питающей сети . е(Ъ и(., UPC, и их инверсии U, Uct,, Ug,(. . Каждому из этих шести напряжений соответствует свой нуль-орган, которые объединены в блок 1 нульорганов и регистратора полярностей фаз (фиг. 2). Входы нуль-органов связаны с соответствующими фазами трехфазной питающей сети, а выходы через специальные формирукнцие и логические схемы подключены к входу устройства ввода микропроцессорного вычислительного блока 2. Микропроцессорный вычислительный блок 2 представляет собой программируемое, управляющее в реальном масштабе времени специализированное вычислительное устройство, в состав которого входят программно-задающий блок 3, микропроцессор 4, блок 5 ввода и блоки 6 и 7 вывода информации, связанные между собой шинами 8 управления, адреса 9 и шинами 10 данных. В качестве такого вычислительного блока может быть также использована миниатюрная вычислительная машина (микро-ЭВМ, микрокомпьютер) , вьтолненная на основе какоголибо конкретного микропроцессорного набора. Программно-задающий блок 3 представляет собой сочетание перепрограммируемого запоминаняцего устройства и рпера1;ивного запоминающего устройства и служит для хранения программы работы, констант и переменных данных, получаемых от внешних устройств и в рег ультате вычислений. Микропроцессор 4 состоит из стандартных узлов: ВИС регистрового арифметико-логического устройства 11 устройства 12 управлякщей памяти, БИ управления выполнением операций 13 и интерфейса 14 (согласующего устрой ства) для связи микропроцессора с каналом шин адреса, данных и управле ния. В состав БИС управления вьшолне нием операций 13 входит система прерьгоаний микропроцессора, которая име ет два входа 15 и 16 в виде отдельных шин. Работа основной программы устройства может быть прервана либо от воздействия блока 1 (от нуль-орга нов) по входу 15, либо от блока 17 . программно-управляемых счетчиков по входу,16. При этом микропроцессор переходит на соответствующую подпрограмму обслуживания прерьгеания. Блок 17 счетчиков тактовых импуль сов содержит два двоичных нереверсив ных вычитающих счетчика 19 и 20 тактовых импульсов, блок 21 управления счетчиками и блок 22 определения при оритета счетчиков. Счетчики 19 и 0 могут загружаться, двоичными кодами и управляться программно по шинам адреса 9, данных 10 и управления 8 через блок 7 параллельного вывода информации. Для этого информационные выходы Злока 7, подсоединены к информационным входам 23 и 24 счетчиков, а управлякшщй выход - к входу 25 блока 21 управления счетчиками. Счет чики 19 и 20 служат для отсчета временных интервалов, соответствующих заданным или рассчитанным значениям ; угла -it отпирания вентилей. Счетчик 19 служит для отсчета углов отпирания вентилей катодной группы моста, а счетчик 20 - анодной группы. Счетчики 19 и 20 ведут счет тактовых импульсов от задающего высокочастотного генератора 18 тактовых импульсов, выход которого связан со счетными входами с четчиков. Выходы счетчиков подключены к входам блока 22 определения приоритета счетчиков, выход которого образует импульсный выход блока 17, который в свою очередь подсоединен к входу прерываний микропроцессора 4 для запуска подпрограммы обслуживания прерьгоаний вычислительного блока 2 от счетчиков 19 и 20 тактовых импульсов. Каждьй из счетчиков 19 и 20 является нереверсивным, синхронным и снабжен триггером окончания счета, Счетные входы счетчиков 19 и 20 объединены и связаны через элемент разрешения счета.с входом тактирования блока 17. Информационные входы отдельных триггеров каждого из счетчиков 19 и 20 отбразуют информационный параллельный кодовый вход для эагрузки начального кода отмеряемого угла отпирания. Кодовые счетчиков 19 и 20 подключены соответственно с информационным входам 23 и 24 блока 17.Управляющий вход 25 блока 17 связан через блок 21 управления счетчиками с входами записи (установочньм}, сброса и разрешения счета счетчиков 19 и 20. Выходы триггеров окончания счета счетчиков 19 и 20, подключены к соответствующим входам блока 22 определения приоритета счетчиков, а выход последнего п.одсоединен к импульсному выходу блока 17. Блок 22 определения приоритета счетчиков можат иметь- различную конструкцию и может быть вьтолнен, например, по стандартной логической схеме разделения 2ЙЛИ. В этом случае он осуществляет равный приоритет счетчи 20 тактовых импульсов, Точность регулирования угла отпи- рання зависит от выходной частоты генератора тактовых импульсор, которая выбирается в пределах от t до., ЮО кГц,, и от числа двоичных разрядов счетчика, которое колеблется от 8 до 12. Блок 26 служит для окончательного формирования, усиления и распределе ия отпираюйщх импульс.ов по вентилям преобразователя. Для этого информа1Р10ННЫЙ выход микропроцессора 4 связан тинами 8-10 с входом блока 26 распределения импульсов, через блок 6 параллельного вывода дискретной информащш. Блок 5 параллельного ввода служит для ввода в микропроцессорный модуль дискретной информации и имеет несколько входов (каналов ввода), задаваемых их адресами: канал 27 для ввода дискретной информации от регистратора полярностей фаз блока 1, канал 28 для ввода информации о заданном значении угла отпирания, канал 2,9 для ввода дискретного сигнал обратной связи по току или напряжению вентильного преобразователя и т.п. Блок 5 ввода имеет также вход 30 и выход 31 для передачи импульсного сигнала прерывания, выработанного каким-либо внешним блоком. В предлагаемом устройстве прерывание программы осуществляется при наступ лении момента перехода через нуль какого-либо линейного напряжения трехфазной питающей сети от импульса, который формируется нуль-органа ми блока 1. Для этого импульсный вы ход блока 1 подключен к входу 15 устройства 13 управления микропроцессора через вход 30 и выход 31 по прерыванию блока 5 ввода. Канал 32, соединяющий блоки 1 и 5, служит для передачи сигналов управления ввод микропроцессорного вычислительного блока 2 в блок 1. Блок 1 нуль-органов и регистратора полярностей фаз содержит (фиг.2) разделительньй согласующий трансформатор 33, шесть каналов 34-39 преобразования информации о состоянии полярностей фаз напряжений питающей сети с последовательно соединенными нуль-органом 57 и формирователем 58 импульсов синхронизации, в каждом из каналов, управляемый шести битный регистр 41 на шести логических элементах 2И с шестибитными информационными входом и выходом 27 и входом 56 управления и шестивходовый логический элемент бИ-НЕ 40. Первичные обмотки фаз разделительного трансформатора 33 соединены в стандартную схему треугольника и подключены к трехфазной питающей сети, а вторичные соедигнены в звезду и подключены к входным зажимам нуль-органов. Из шести нуль-органов блока 1 три, принадлежащие каналам с номерами 34, 36 и 38, регистрируют переход питающих линейных напряжений от отрицательных значений к положительным, а остальные три, принадлежащие каналам с номерами 35, 37 и 39 - от положительных значений к отрицательным. Выходы нуль-органов связаны через транзисторные формирователи импульсов с соответствующими входами шестивходового логического элемента АО, осуществляющего логику бИ-НЕ. Выход этого элемента является импульсным выходом 30 блока 1 и присоединен к входу по прерыванию устройства 5 ввода. Внутреннее устройство каналов 3439 преобразования информации о состоянии полярностей фаз напряжений питающей сети и входящих в них нульорганов и формирователей импульсон синхронизации может быть различным. На фиг. 2 представлен один из самых простых вариантов выполнения нульорганов и формирователей. Нуль-орган любого из каналов 3439 преобразования информации о состоянии полярностей фаз напряжений питающей сети содержит в свою очередь входную цепь и транзисторный усилитель-нормализатор. Например, нульорган 57 канала 35 содержит разделительный диод 42 с токоограничивающим резистором 43, опорный диод 45 с токоограничивающим резистором 44 и усилитель на транзисторе 49. Цепочка последовательно соединенных разделительного диода 42 и резистора 43 включена между началом обмотки соответствующей фазы и общейточкой звезды фаз вторичной обмотки трансформатора 33. Цепочка последовательно соединенных резистора 44 и опорного диода 45 подключена параллельно резистору 43. Входная цепь предназначена для согласования величины входного переменного напряжения с уровнем входных сигналов транзисторного усилителянормализатора и ТТЛ-логики и для формирования сигнала логической 1 в течение первого или второго полупериода переменного напряжения, т.е. для выбора нужного полупериода. На выходе этой цепи, т.е. на опорном диоде 45, проводящем ток в прямом направлении, получается прямоугольньй импульс той или другой полярности в зависимости от выбранного полупериода. Транзисторный усилитель-нормали-г затор содержит транзистор 49 п-р-птипа, базовый 46 и коллекторный 48 резисторы, а также резистор 47 смеще ния . Вход усилителя-нормализатора подключен параллельно диоду 45. Усилитель-нормализатор служит для усиле ния и ограничения импульсов, подавае мых от входной цепи, а также приведе ния их к уровням логической 1 и логического О. Схема усилителянормализатора меняется в зависимости от того, -в каком полупериоде входного переменного напряжения он формиру ет сигнал логической . Если он формирует сигнал логической 1 в первом полупериоде, а сигнал логичес кого О во втором, он выполняется по схеме эмиттерного повторителя. При этом он не имеет резистора смещерш, а резистор 48 нагрузки стоит в цепи эмиттера. По такой схеме выполнены нуль-органы каналов 34, 36 , и 38. Если он формирует сигнал логической 1 :во втором, полупериоде, а сигнал логической О в первом, он выполнен по схеме с общим эмиттером. При этом он снабжен резистором 47 смещения, который включен между плю- 30 совой шиной источника и байой, а нагрузочный резистор 48 включен в цепи коллектора транзистора 49. По такой i схеме выполнены нуль-органы каналов 35, 37 и 39. Совокупность шести нуль-органов образует шестиканальньш регистратор полярностей фаз напряжений питающей. сети, имеющий шестибитный выход. Напряжение на выходе любого усилителя-нормализатора является информа; ционным ВЫХОДНЫМ сигналом для соотI ветствующего канала регистратора по лярностей фаз, поэтому для передачи этого сигнала выход любого усилителя нормализатора соединен с информацион ньм входом соответствующего двухвходового элемента 2И управляемого регистра 41 передачи информации. В состав любого из каналов 34-39 преобразования инфот мации 34 входи формирователь импульсов синхронизации. Например, формирователь 38 импульсов синхронизации, входящий в состав канала 35, содержит д Ьферен цирующую цепь и выходной транзисторный усилитель. Дифференцирующая цепь ;Состоящая из после; овательно соеди- ненных конденсатора 50 и резистора 51, подключена, между выходом нулборгана 57 (коллектор транзистора 49) и общим проводом. Она служит для формирования узких импульсов напряжения в момент перехода линейного напряжения Цдс через нулевое значение. Выходной транзисторный усилитель вьтолнен по схеме с обпщм эмиттером и содержит транзистор 55, базовый 53 и коллекторный 54 резисторы. Вход транзистора усилителя через разделительный диод 52 подключен параллельно резистору 51 дифференцирующей цепи. Разделительный диод 52 служит для блокирования отрицательного импульса, сформированного дифференцирующей цепью. Транзистор 55 открывается только в те промежутки времени, когда- от последней приходят положительные узкие импульсы. Соответственно в эти же промежутки времени на выходе усилителя, т.е1 на коллекторе транзистора 55, вырабатываются узкие импульсы напряжения, инвертированные относительно положител ьного уровня напряжения питания +5В. Устройство остальных каналов rtpeобразования информации о состоянии полярностей фаз напряжений питающей сети аналогично, отличия заключаются лишь в точке подключения входной цепи, направлении проводимости разделит тельного 42 и опорного 45 диодов и конфигурации схемы усилителя-нормализатора. Выходы формирователей импульсов всех шести каналов 34-39 преобразования информации подсоединены к соответствующим входам шестивходового логического элемента 6И-НЕ 40, который о.существляет логику ИЛИ для инверсных значений сигналов на его входах. Следовательно на выходе элемента40 вырабатывается серия узких импульсов положительной полярности, частота которых равна шестикратной частоте питающей сети. Каждый из этих импульсов появляется в момент перехода какого-либо из линейных напряжений сети через нуль. Выход элемента 6И-НЕ 40 образует импульсный выход 30 блока 1, который в свою очередь подключен к импульсному вход5 блока 5 ввода информации, выход 31 которого подсоединен к входу 15 прерываннй микропроцессора 4. При поступлении импульса синхронизации с выхода 30 блока 1 наступает прерывание основной программы процессора и запускается подпрограмма обслуживания прерываний от нуль-органов. Управляемьй регистр 41 передачи информации вьтолнен на шести двухвходовых тогических элементах 2И. Первые входы этих элементов образуют информационный вход регистра 41 и подсоединены к выходам соответствующих нуль-органов каналов 34-39. Вторые входы этих элементов объединены )К йине 56 управления регистра 41 канала 32 управления блока 1, по которой передается з равляниций сигнал Ввод от блока 3 параллельного ввода информации. Шестибитный выход управляемого регистра 41 является информационным выходом 27 блока 1 нуль-органов и регистратора полярностей фаз, который подключен к информащюнному входу блока 5 ввода информации. Устройство для упь авления вентил ным преобразователем работает следу
ющим образом.
После включения электропитания и запуска программы программнозадающий блок 3 микропроцессорного вычислительного блока 2 выполняет первоначальные сброс и установку всех внешних устройств и блоков, включает систему прерьюаний микропроцессора 4 и вырабатывает определенный закон управления. Заданное значение угла отпирания, например, в двоичном коде считьюается микропроцессором через блок 5 ввода по каналу 28, корректируется в соответствии с сигналом обратной связи, вводимым по каналу 29, согласно вьфаботанному закону управления и подготавливается к вьщаче его на информационные входы 23 и 24 программноуправляемых счетчиков 19 и 20.
Блок 2 н ль-ор ганов и регистратора полярностей фаз на своем выходе 30 вьфабатьгоает после каждого момента перехода одного из линейных напряжений сети через нулевой уровень узкий импульс, поступающий через устройство 5 ввода на вход 15 систе-мы прерываний микропроцессора 4. Так как временная задержка появления этик импульсов после соответствующих моментов перехода через нулевой уровень незначительна, то практически эти импульсы можно считать совсостояние вентилей диодного моста.
В любой момент времени на входах регистра. 41 имеется информащ1я о текущем состоянии полярностей фаз линейных напряжений. Эта информация считьшается микропроцессором 6-битным параллельным кодом по каналу 27 через устройство 5 путем подачи сигнала логической 1 (сигнал Ввод) на управляювщй вход 56 регистра 41 (фиг. 2). Разрядам этого кода соответствуют следуннцие нульорганы и линейные напряжения (см. табл, 1)..
Устройство 6 вывода данньк связано с управляющими электродами вентилей силового моста через формирователи блока 26 распределения отпирающих импульсов таким образом, что каждому разряду (биту) вьгаодимого байта информации соответствует определенный вентиль моста. Соответствие битов кода, вьщаваемого микропроцессорным модулем 2 через устройство 6 вывода и блок 25, управляемым вентилям моста устанавливается табл. 2.
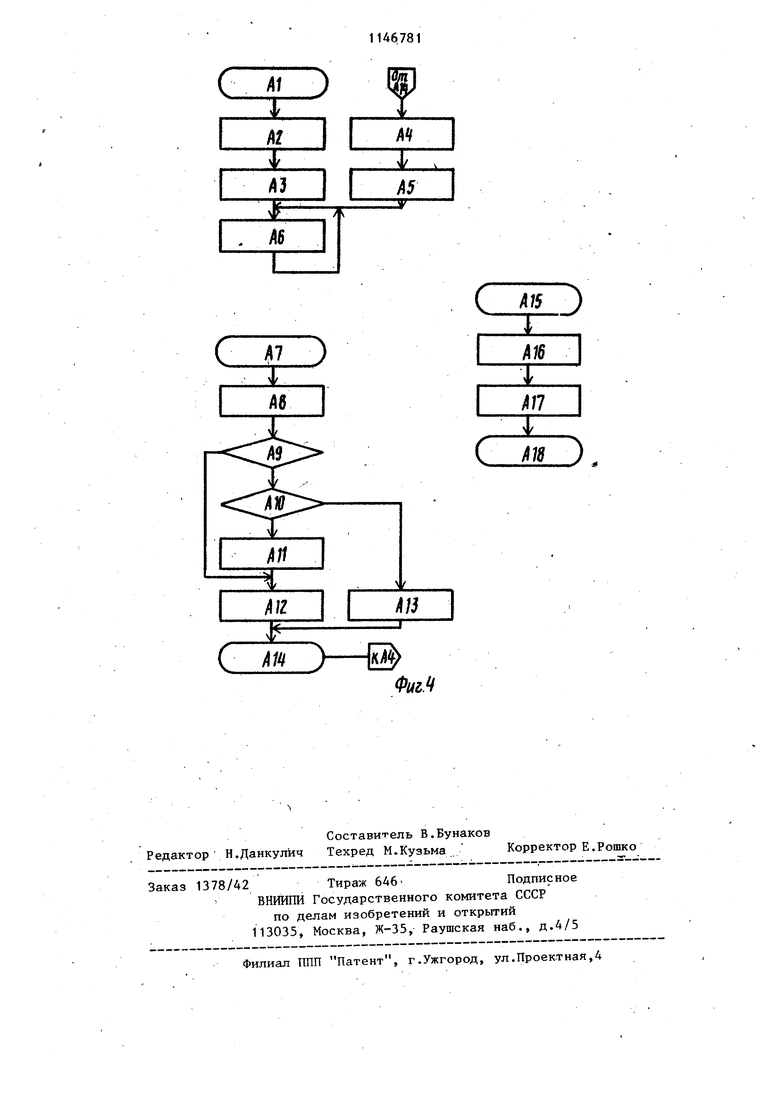
В интервале каждой из зон сетевого напряжения может быть произведено включение только одного, очередного,вентиля моста, при этом предыдущий падающими с моментами естественного отпирания вентилей. Импульсы, генерируемые блоком 1, играют роль импульсов синхронизации работы устройства с переменными напряжениями питающей сети. Весь период изменения каждого питающего напряжения импульсами синхронизации разбивается на шесть интервалов - зон сетевого напряжения. Каждая зона характеризуется определенным кодом на вькоде регистратора полярностей фаз (РПФ) блока 1. В интервале длительности одной зоны значение этого кода остается неизменным. Если бы полупроводниковый силовой мост вентильного преобразователя (ВП) бьш неуправляемым, т.е. вьтолнен не на тиристорах, а на диодах, то с наступлением каждой очередной зоны вступал бы в проводящее состояние очередной вентиль. Из этого следует, что зоны сетевого напряжения можно пронумеровать в порядке очередности включения вступления в проводящее вентиль продолжает проводить ток, а вентиль, предшествовавший предьдуще fУi выходит из состоянияпроводимости. В табл. 3 указано, по какому коду байта входной информации соответствует код байта выходной информации, т.е-, такие вентили могут быть включены в той или иной зоне. Из табл. 3 следует, что единичному состоянию бита выходного кода соответствует высокий уровень напрящения на управляющем электроде тиристора, нулевому сЬстоянию - отсутствие напряжения. Вьщавая в определенные моменты времени единичные коды через устройство 6 вывода и затем снимая их, микропроцессор в последовательности, задаваемой программой, и в соответствии с входными воздействиями осуществляет включение выбранных вентилей, т.е. управление вентильным пре образователем. Микропроцессорный модуль 2 работает в течение всего времени функционирования предлагаемого устройства для управления вентильным преобразователем с момента включения его элек тропитания по программе, хранящейся в его запоминающем устройстве, в соответствии с алгоритмом, приведенным на фиг. 4. Как следует из фиг. 4, алгоритм функционирования устройства состоит из трех частей, которые соответствуют основной программе и двзпи подпрограммам прерывания. Основной програм ;ме соответствуют блоки А1-А6 блок.cxeMbf алгоритма. Подпрограмме прерыi вания от нуль-органов соответствуют блоки A7-At4, подпрограмме прерывания от программно-управляемых счетчиков (ПУС) - 6ЛОКИ.А15-А18. Программа работает циклически, по тактам, начало каждого такта соответствует переднему фронту импуяьса синхронизации (фиг. 3). Каждая зона сетевого напряжения соответст вует одному такту управления, в кото ром производится расчет значеияя угла сЦ отпирания , определение и выпапа соответствующего выходного кода на :отпирание вентилей. Импульсами синхронизации, приходяЕрми от нуль-орга нов блока 1, осуществляется-прерываi ние основной програг о ы шесть раз за период. В каждом такте микропроцес 1 8116 сор считывает системную информацию, например по каналу 28 - заданное значение выходной координаты (напряжения или тока на выходе ВП), код режима работы и др. Пусть для определенности вентильньй преобразов атель работает в режиме регулирования напряжения U постоянного тока на активно-индуктивной нагрузке, В этом случае по каналу 28 считывается в двоичном коде заданное значение выходного напряжения Uof3«A.. По каналу 29 с датчика считывается в двоичном коде значение сигнала обратной связи, т.е. технологическая информация о контролируемом параметре. В нашем случае таким параметром является фактическое значение выход- . ного напряжения 11 . Примем, что устройство управления ВП работает с разомкнутой обратной связью (KO,(O), а закон управления соответствувт отработке ступенчатого входного сигнала постоянного значения бесконечной длительности, поданного на вход«28 в момент времени t,. Ниже приведено описаггае блоков алгоритма, соответствующее блок-схеме на фиг. 4. Блок А1 Начало. Этому блоку соответствует запуск основной части управлякидей программы. Блок А2 Инициализация. В этом блоке микропроцессорный модуль 2 выполняет первоначальные сброс, установку и исходное состояние всех внешних устройств и блоков и подготовку рабочих ячеек памяти, включает систему прерьшаний микропроцессора 4 и включает в нее блоки 1 и 17, способные вызвать прерывания. Блок A3 Определение начального значения угла отпирания. Заданное начальное значение U, например, в двоичном коде считывается микропроцессором 4 через устройство 5 ввода по каналу 28. Начальное значение угла отпирания вычисляется по ормуле JI , .-.. ....|, arccos алее умножается на соответствующий асштабный коэффициент и подготавлиЧР вается к вьщаче его на информационный вход программно-управляемого счетчика 19 блока 17. Блок А4 Прием входной информации . Этот блок и все. последующие принадлежат циклически повторяющейся части программы в отличие от блоков А1-АЗ, характеризукищх начальный ее участок. По каналу 28 считывается заданное значение выходного напряжения ВП Ujgp,. По каналу 29 считывается сигнал обратной связи, т.е. тех нологическая информация о контролиру емом, параметре. В нашем случае таким параметром является фактическое значение выходного напряжения U. Блок А5 Расчет следующего значения угла отпирания. По известным и рассчитьшаётся в соответствии с выбранным законом регулирования значение угла d отпирания для следующего вентиля Так как где Од - линейное напряжение сети .Затем текущее значение угла -dумножается на коэффициент пересчета в код временного интервала, вьщавае мьй на информационный вход счетчико 19 или 20, Блок Аб Ожидание прерывания. Так как все расчетные и подготов тельные операции вьшолнены, то дает команда разрешить прерьгоания микропроцессора 4 и затем вновь перейти к блоку 6, т.е. ожидать прерывания. Блок А7 Прерьшание от нуль-орга нов . При достижении каким-либо линейньм напряжением питающей сети нулев го уровня блок 1 нуль-органов и регистратора полярностей фаз вьфабаты вает узкий импульс на своем 30, чем воздействует через блок 5 параллельного обмена на вход 15 сис темы прерьшания микропроцессора 4. Начинается выполнение подпрограммы Прерывание от нуль-органов. Блок А8 Прием кода от РПФ. Микропроцессор осуществляет прие цифрового 6-разрядного кода от регистратора полярностей фаз блока 1 по кангшу 27 через устройство 5 вво да. J 8118 Блок А9 Зона вентилей катодной . группы Микропроцессор анализирует код состояния полярностей фаз и по нему определяет, зона какого вентиля имеет место в данный момент времени. Если идет зона вентиля катодной группы (с нечетным номером), то программа переходит к блоку А12, если нет, то к блоку А10. Блок А10 Зона вентилей анодной группы. Микропроцессор анализирует код состояния полярностей фаз и по нему определяет, идет ли в данньй момент зона вентиля анодной группы (с четным номером). Если идет зона четного вентиля, то программа переходит к блоку А13, если же ни одна из зон не идентифицирована, то к блоку АИ. Блок All Аварийный останов. Так как микропроцессором не бьша идентифицирована зона ни одного из вентилей, это означает, что пятьй код от .совпадает с эталонными кодами зон и, следовательно, имеются нарзппения в работе аппаратуры. Возможность выхода программы на блок All позволяет организовать программно следующие функции устройства: диагностику состояния тракта входных сигналов (питающая сеть, блоки 1 и 5); автоматический поиск неисправного узла; вьщачу на печать или экран дисплея сообщения обслуживающему персоналу; выполнение переключений, аварийное отключение; включение сигнализации, аварийный останов. В приведенном примере предусмотрен только Аварийный останов. Блок А12 Выбор очередного вентиля катодной группы. Запуск ПУСГ. Блок работает, если имеет место зона 1, 3 или 5. В ячейку памяти выдаваемого на управлякмще электроды тиристоров кода с именем С01 записывается код из табл. 3 соответственно 1, 3 или 5 вентиля, подлежащего включению после отработки с Wt .Затем формируется и по каналу 23 выдается крд управления, содержащий адрес(бит 15) и двоичный код временного интервала в младших битах программноуправляемого счетчика 19 (ПУС1). Одновременно по каналу 25 сигнал Вывод, после получения которого ПУС1 запускается.
БЛОК А13 Выбор очередного вентил анодной группы. Запуск ПУС2.
Блок работает, если имеет место зона 2, 4 или 6. В ячейку памяти выдаваемого на управляющий электроды тиристоров кода с именем С01 записывается код из табл. 3 соответственно 2, 4 или 6 вентиля, подлежащего включению в данной зоне. Затем формируется и вьщается по каналу 24 код управления, содержащий адрес (бит 15) и двоичньй код временного интервдла в младших битах программно-управляемог счетчика 20 (11УС2) . Одновременна по каналу 25 вьщается сигнал Вьшод, после получения которого ПУС2 запускается .
БлокА14 Выход из прерывания Hd расчет угла отпирания.
Ссуществляется выход микр6процесс ра из режима прерывания от нуль-органа, и программа переходит к блоку 4, т.е. на прием входной информации и затем расчет следующего значения угл отпирания.
Епок А15 Прерьгеание от ПУС1 или ПУС2.
После запуска выбранный счетчик 19 или 20 начинает вычитать из записанного начального кода по единице с приходом каждого тактового импульса от генератора 18 и после отсчета интервала времени, соответствующего рассчитанному углу отпирания в момен обнуления воздействует через схему 2 приоритета (схему монтажное ИЛИ) и вход 16 на систему прерываний микропроцессора 4. Процессор прерывает свою работу и переходит на подпрограмму Прерывание от ПУС1 или ПУС2 (блока А15).
Блок А16 Сброс ПУС1 или ПУС2.
Первой же операцией подпрограммы прерьгоания от счетчиков является сброс триггеров прерывания ПУС1 или ПУС2, паходящихСя в блоке 21 управления счетчиками. Сброс этих триггеров осуществляется по сигналу Ввод , вьиаваемому микропроцессором через устройство вывода 7 в блок21 по каналу 25.
Блок А17 Включение выбранного , вентиля.
В соответствии, с кодом выбранно. го ранее в блоках А12 или А13 вентиля, микропроцессор выдает через устройство 6 вывода данных в блок 26 распределения отпирающих импульсов сигнал.напряжения на управляющие электроды включаемого вентиля .и предьщущего, включенного вентиля дл5 подтверждения -проводящего состояния последнего.
Елок А18 Выход из прерывания.
Происходит выход микропроцессора из режима прерывания от блока 17 программно-управляющих счетчиков, и программа вновь возвращается к той команде, перед которой произошло прерывание.
С приходом импульса прерьшания от следующего, очередного, нульоргана блока 1 весь цикл работы повторяется согласно блок-схеме алгоритма от блока А6 через подпрограмму прерывания от нуль-органов (блоки А7-А14), блоки А4, А5, А6 и подпрограмму прерывания от ПУС1 или ПУС2 для зоны следующего включаемого вентиля.
В предлагаемом устройстве по сравнению с известным имеются два счетчика для отсчета углов отпирания шести вентилей преобразовательного моста, одного для катодной группы, другого для анодной группы вентилей. Счетчики запускаются в моменты естественного отпирания поочередно, что при наличии программного контроля очередности повышает надежность работы устройства и вентильного преобразователя.
Достоинством устройства является возможность изменения закона управления углом отпирания вентилей по определенной наперед заданной или корректирующейся в процессе управления программе, что является залогом построения адаптивных или самонастраивающихся систем на его основе. Возможность работы по изменяемой, корректирующейся программе, повышает гибкость, управления вентильнь1м преобразователем и, следовательйо, расширяет функциональные возможности управления.
Преимуществом предлагаемого устройства является освобождение микропроцессора от элементарной функции отсчета временных интерпалов, занимающей большую часть (до 98%) млшинного времени и резко снижающей эффективность использЪвания процессор ного элемента в устройстве. Эта функция счета количества тактовых импульсов для отмеривания интервала задержки включения выбранного вентиля возложена в устройстве на обычные 21 . внешние двоичные счетчики тактовых импульсов. На процессор возложена функция более высокого уровня функция управления углом отпирания вентилей преобраэ1ователя, которая состоит из следующих более мелких функций: Ф1 - управление работой системы прерьгоаний самого процессора; Ф2 - прием заданного значения . угла отпирания или заданного закона его изменения, а также информации о значении сигнала обратной связи; ФЗ - управление приемом информации о состоянии напряжений питакицей сети; ФД - анализ входной информаци и выбор следующего отпираемого вент ля; Ф5 - расчет необходимого угла о пирания для выбранного вентиля; Фб управление работой внешних счетчик тактовых импульсов, в том числе: Ф6.1 - выбор соответствующего счетчика, Фб.2 - занесение кода угла отпи рания в выбранный счетчик, Фб.З - запуск выбранного счетчи Ф6.4 - прием прерывания (т.е. с нала о том. что заданный интервал времени уже отсчитан), ф6.5 - сброс сирнала прерывания сработавшего счетчика, Разряд кода (бит) -Логическая переменная на входах регистра 41 Номер нуль-органа (фиг. 2) 34 39 I Диаграмма (фиг. 3) Н06 Н05 Линейное напряжение АВ СВ
Разряд(бит) выводимого
Q5 кода Номер включаемого вентиля В6
Таблица 2
03
02
00
01
В4
ВЗ
В1
В2 1 ф7 - вьщача сигнала на включение выбранного вентиля. Здесь перечислены функции процессора, а именно только те, которые необходимы для выполнения основного назначения устройства - управления вентильным преобразователем. При реализации описанного алгоритма управления, основанного на использовании средств прерывания, эти функции занимают всего лишь около 2,5% машинного времени процессора. При этом внешний блок счетчиков, выполняя функцию тактовых импульсов внешнего задающего генератора, работает непрерьшно и параллельно с процессором. В результате такой организации аппаратных и программных средств на процессор можно дополнительно возложить функции диагностики технического состояния, текущего контроля параметров технологическогр процесса, сигнализации, выдачи сообщений обслуживающему персоналу, поиска оптимального режима и др. Это приводит к расширению функциональных возможностей устройства путем сокращения машинного времени, затрачиваемого микропроцессором на управление углом отпирания вентилей. 4Таблица 38 37 Н04 НОЗ СА ВА 11В1 12В2 13ВЗ о4В4
22
ж
Таблида 3 о о о 1 1. о о
30
щ
Фиг.г
fg
N
,
F
Мб
АЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Conf | |||
| Prod Ind | |||
| and Contr | |||
| Appl | |||
| Microprocessors , Philadelphia, Pa, 1979, New Vork, 1979, X | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
