iinnr;)Tp.nev, ;i иерпичиая пбмотк;) упомянутого трансформатора подключена к источнику питания пынрямителя.
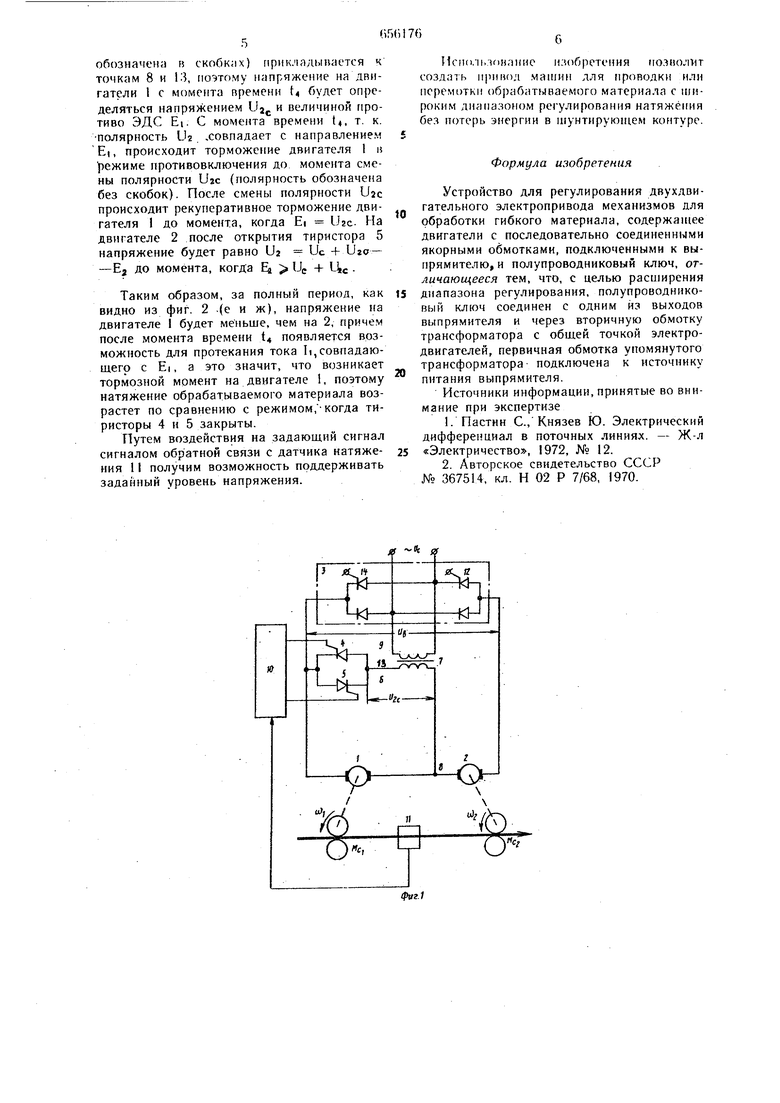
ila фиг. I представлена схема устройства для регулирования днухдвигательного привода, а на фиг. 2 - эпюры напряжений п кпазистатическом режиме.
Устройство для регулирования двухдвигательного электропривода содержит двигатели 1,2с последовательно соединенными якорными обмотками и подключенные к однофазному кссимметричному выпрямителю 3 полупроводниковый ключ, состоящий из двух встречно-параллельных тиристоров 4, 5, причем соединен он с одним из выходов выпрямителя и через вторичную обмотку б трансформатора 7 с общей точкой 8 элйктродвигателей. Первичная обмотка 9 трансформатора 7 подключена к источнику питания Uc. Управление тиристорами 4, 5 осуществляется посредством системы импульснофазового управления 10, на вход которого поступают сигналы с датчика натяжения 11. При регулировании угла,зажигания тиристора 4 меняется ток подпитки двигателя 1, что.позволяет изменять величину натяжения транспортируемого материала вплоть до нуля....
При регулировании угла зажигания тиристора 5 меняется ток подпитки двигателя 2 и-количество энергии рекуперируемой в сеть двигателем 1.
При увеличении тока подпитки двигателя 2 количество рекуперируемой в сеть энергии также увеличивается, что вызывает увеличение частоты вращения двигателя 2 и уменьщение частоты вращения двигателя 1 и соответственно увеличение натяжения транспортируемого материала. Таким образом, регулируя ,угол зажигания тиристора 5, можно изменять величину натяжения транспортируемого материала в больших пределах.
Предлагаемое устройство предназначено для мащин с большим диапазоном регули; рования натяжения обрабатываемого материа,а, например, шлихтовальных, в которых каждому виду обрабатываемого материала соответствует свой определенный уровень натяжения и этот уровень колеблется от 30 кг до 400 кг. Причем минимальный урове.нь натяжения может быть обеспечен за счет .момента статического сопротивления MCI а для обеспечения максимального уровня натяжения необходим добавочный тормозной момент на валу двигателя 1.
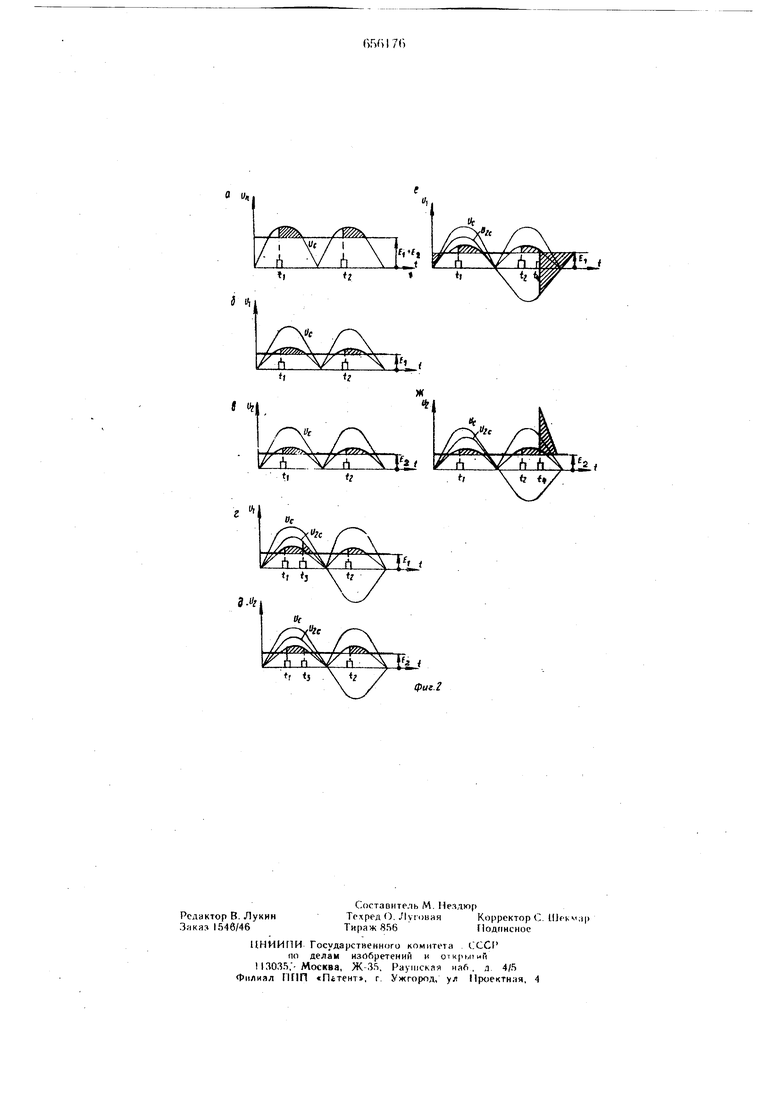
Эпюры напряжений построены без учёта падений напряжений на индуктивностях якорной цепи, которые сеставлявдт 5-10% от общего напряжения, и.значительно усложняют физическую картину.
На фиг. 2 (а, б,в) представлены эпюры напряжений для случай,, когда тиристорЪ 4 и 5 закрыты. Пафиг. 2 а представлена
кривая изменения суммарного напряжения на двигателях 1 .и 2 (сплопшая линия).. В момент времени ti открывается тиристор 4, а время t - это момент открытия тиристбра 5.
- Заштрихованные участки показывают величину падения напряжения на активном сопротивлении в якорной цепи и. они пропорциональны величине тока. На фиг. 2 б представлена кривая изменения напряжения па двигателе 1. На фиг. 2 в представлена кривая изменения напряжения на двигателе 2.
Так как рабочие органы и двигатели одинаковые, а вытяжка обрабатываемого материала мала, обе кривые одинаковы и величина их равна половине напряжения UB суммарного напряжения на двигателях 1 и 2.
Режим работы, когда тиристоры 4, 5 закрыты, возможен в том случае, если MC-I . Натяжение обрабатываемого материала определяется в данном случае разностью моментов MCI - Мс2.
На фиг. 2 (г, д, е) представлены кривые изменения напряжений-на двигателях 1 и 2 соответственно для случая, когда работает тиристор 4.Тиристор 14 открывается в полупериод, полярность которого указана на фиг. 1 без скобок,и в этот же полупериод, согласно полярности проставленной на обмотке 9 трансформатора, будет работать тиристор 12. Тиристор 4 открывается в момент времени 1э, при этом напряжение 1/20 . выбранное при проектировании, больше максимального напряжения на двигателе 1, прикла-дывается к точкам 13 и 8 (фиг. 1), поэтому напряжение на двигателе I с момента tj увеличится до напряжения Uzc, а на двигателе 2 уменьшится и станет равным разности Uc Uac. В конце периода, когда EI и2с,тиристор 4 закрывается.
В следующий полупериод (полярность на фиг. 1 обозначена в скобках) тиристор 4 не работает и поэтому напряжение на двигателях в этот полупериод одинаковое. Таким образом, за полный период, как виднсг из фиг. 2 (гид), напряжение на двигателе 1 больше, чем на 2, поэтому ток, а соответственно и момент, .развиваемый двигателем 1, будет больше, чем у двигателя 2, значит уровень натяжения обрабатываемого материала снизится по сравнению с уровнем для случая, когда тиристоры 4 и 5 закрыты.
На фиг. 2 (е, ж) представлены кривые изменения напряжений на двигателях 1 н 2 соответственно для случая, когда работает тиристор 4 С .момента времени t, и До конца первого нолупериода тиристор 5 закрыт, напряжение на двигателях одинаковое. В следующий полупериод,с момента времени t2 (открывается тиристрр 4) до момента времени t напряжение на двигателях- одинаково. В момент времени t4 открывается тиристор 5, напряжение Uac- (полярность обозначен; в скобк;1х) приклалыпается к точкам 8 и i, поэтому напряжение на двигатели 1 с момента времени t будет определяться напряжением Uj. и величиной противо ЭДС ЕЬ С момента времени t4, т. к. полярность Ua .совпадает с направлением Е|, происходит торможение двигателя 1 к режиме противовключения до момента смены полярности Ujc (полярность обозначена без скобок). После смены полярности Uac происходит рекуперативное торможение двигателя 1 до момента, когда Ei Ujc. На двигателе 2 после открытия тиристора 5 напряжение будет равно Uj Uc -f Uza - -Ед до момента, когда Е U + Цс Таким образом, за полный период, как видно из фиг. 2 .(е и ж), напряжение на двигателе 1 будет меньше, чем на 2, причем после момента времени t4 появляется возможность для протекания тока Ь,совпадающего с Е|, а это значит, что возникает тормозной момент на двигателе 1, поэтому натяжение обрабатываемого материала возрастет по сравнению с режимом,-когда тиристоры 4 и 5 закрыты. Путем воздействия на задающий сигнал сигналом обратной связи с датчика натяжения 11 получим возможность поддерживать заданный уровень напряжения. Испо.плпи.пшо м;и)бретення rio3iioJi iT создать привод мапшн лля проводки или перемотки обрабатываемого материала с ii;nроким диапазоном регулирования натяжения без потерь энергии в шунтирующем контуре. Формула изобретения Устройство для регулирования двухдвигательного электропривода механизмов для обработки гибкого материала, содержащее двигатели с последовательно соединенными якорными обмотками, подключенными к выпрямителю, и полупроводниковый ключ, огличающееся тем, что, с целью расщирения диапазона регулирования, полупроводниковый ключ соединен с одним из выходов выпрямителя и через вторичную обмотку трансформатора с общей точкой электродвигателей, первичная обмотка упомянутого трансформатора подключена к источнику питания выпрямителя. Источники информации, принятые во внимание при экспертизе . Пастин С.,Князев Ю. Электрический дифференциал в поточных линиях. - Ж-л «Электричество, 1972, № 12. 2. Авторское свидетельство СССР № 367514, кл. Н 02 Р 7/68, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХЕМА ПИТАНИЯ ЭЛЕКТРОПРИВОДА СО СГЛАЖИВАЮЩИМ ДРОССЕЛЕМ В ЦЕПИ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2224350C2 |
| Устройство для регулирования двухдвигательного электропривода | 1982 |
|
SU1131013A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ДВУХДВИГАТЕЛЬНОГО | 1973 |
|
SU367514A1 |
| Устройство для сварки | 1986 |
|
SU1382616A1 |
| РЕВЕРСИВНЫЙ ОДНОФАЗНЫЙ МОСТОВОЙ ТРАНЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2485664C1 |
| Устройство для возбуждения электрической машины | 1979 |
|
SU879729A1 |
| ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2581603C1 |
| Полупроводниковый регулятор напряжения для генераторов переменного тока | 1979 |
|
SU904185A1 |
| КОРРЕКТОР КАЧЕСТВА НАПРЯЖЕНИЯ | 2016 |
|
RU2643155C1 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРНЫМ РЕГУЛЯТОРОМ НАПРЯЖЕНИЯ ТРАНСФОРМАТОРА | 2009 |
|
RU2398342C1 |
йо,
(
у.
о
«с
0 y.
S (f,
S ti
iV
v f AT
фиг.2
