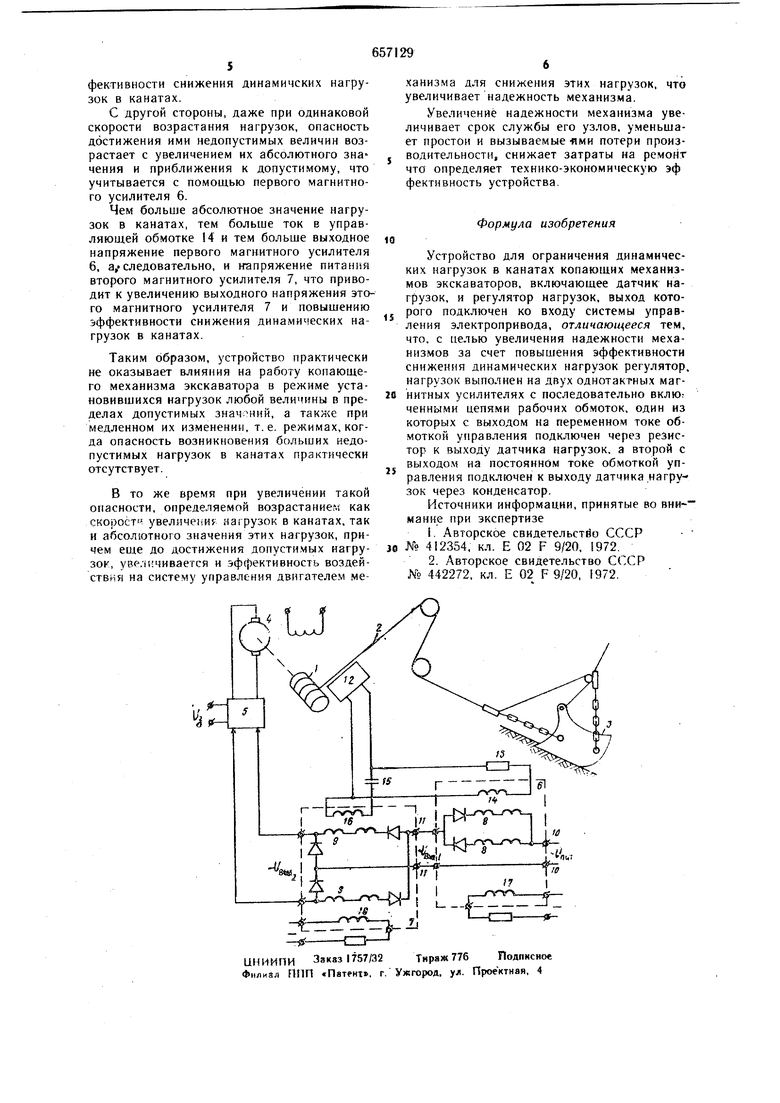
чение усилии, если последние превысят стопорное значение. Недостаточная эффективность действия этого известного устройства определяется тем, что оно вступает в действие только после достижения допустимых значений нагрузок, вследствие чего при быстром нарастании нагрузок в режиме стопорения при столкновении ковша с непреодолимым препятствием возможно существенное превышение усилий в канатах допустимого значения. Целью изобретения является увеличение надежности механизмов за счет повышения эффективности снижения динамических нагрузок. Эта цель достигается тем, что регулятор нагрузок выполнен на двух однотактных магнитных усилителях с последовательно включенными цепями рабочих обмоток, один из которых с выходом на переменном токе обмоткой управления подключен через резистор к выходу Датчика нагрузок, а второй с выходом на постоянном токе обмоткой управления подключен к выходу датчика нагру- зок через конденсатор. Сущность изобретения поясняется чертежом. Копающий механизм экскаватора включает лебедку 1, канат 2 и ковщ 3. С лебедкой связан вал двигателя 4, к якорной цепи которого подключена система управления 5. Первый 6 и второй 7 однф-актные магнитные усилители образуют регулятор на- грузок. Рабочие обмотки 8 первого магнитиого усилителя 6 включены по схеме с выходом на переменном токе, а рабочие обмотки 9 второго магнитного усилителя 7 - по схеме с выходом на постоянном токе, причем клемМы 10 питания первого магнитного усилителя 6 подключены к источнику переменного напряжения, а клеммы II питания второго магнитного усилителя 7 подк.точены к .выходу первого магнитного усилителя 6, вследствие чего цепи рабочих обмоток первого 6 и второго 7 магнитных усилителей включены последовательно. ВЬ1ход второго магнитного усилителя 7 подключен ко входу системы управления 5 электропривода. Выход датчика 12 нагрузок в канатах подключен через резистор 13 к управляющей обмотке 14 первого магнитного усилителя 6, а через коиденсатор 15 равляющей обмотке 16 второго магнитного усилителя 7. Обмотка смешения 17 первого магнитного усилителя 6 и обмотка смещения 18 второго магнитного усилителя подключены к источникам постоянного напряжения. Устройство работает следующим обрезом. Обмотка смещения 17 первого магнитного усилителя 6 и 18 второго магнитного усилителя обеспечивают практически нулевое выходное напряжение (холостой ход) STHx усилителей. Если вследствие отсутствия нагрузки в канатах выходной сигнал датчика 12 равен нулю, выходное напряжение первого магнитного усилителя 6 практически также равно нулю, а поскольку это напряжение является питающим для второго магнитного усилителя 7, выходное напряжение последнего также равно нулю и сигнал на входе системы управления 5 отсуствует. При конечных значениях нагрузки в канатах 2 пропорциональный этим нагрузкам сигнал поступает с выхода датчика.12 этих нагрузок а управляющую обмотку 14 первого магнитного усилителя 6, выходное напряжение .которого подается на клеммы II питания второго магнитного усилителя 7 и будет тем льше, чем больше величина нагрузок в канатах. Однако, если при этом указанная нагрузка не возрастает и отсутствует опасность превзойти ее допустимое значение, а вследствие этого не возрастает и выходное напряжение датчика 12 нагрузок в канатах, ток в управляющей обмотке 16 второго магнитного усилителя 7 отсутствует из-за включенного в ее цепь конденсатора 15, выходное напряжение второго магнитного усилителя 7 равно нулю и сигнал на входе системы управления 5 также отсутствует. Ток через конденсатор 5 в управляющей обмотке 16 второго магнитного усилителя 7 появится только при изменении нагрузок в канатах 2 и вызываемого этим изменении выходного напряжения датчика 12 этих нагрузок. Полярность включения управляющей обмотки 16 такова, что выходное напряжение второго магнитного усилитеЛя 7 появляется при возрастаиин величины нагрузок (при уменьшении нагрузок ток в управляюцхей обмотке 16 меняет знак, однако второй магиитиый усилитель 7 будет находиться в зоне холостого хода и его выходное напряжение практически будет равно иулю). Указанное выходное напряжение второго магнитного усилителя 7 подается на вход системы управления 5 и обеспечивает перевод электродвигателя 4 в режим торможения, вследствие чего уменьшается скорость „ардстанйя нагрузок в канатах 2 при стоHdpdcidHHnпорении ковша 3 и ограничиваются максимальные значения этих нагрузок, а после прекращения возрастания нагрузок выходное напряжение второго магнитного усилителя 7 становится равным нулю и воздей - систему управления 5 двигателя 4 прекращается. Чем больше скорость нарастания момента нагрузки в Канатах, определяющая увеличение опасности существенного превышения ею допустимых значений, тем больше ток в управляющей обмотке 16 и тем больше выходное напряжение второго магкитного усилителя 7, вызываюи ее увеличение эф
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управлеия электродвигателем постоянного тока и устройство для его реализации | 1979 |
|
SU873367A1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ КОНДЕНСАТОРА | 1989 |
|
RU2018203C1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Инвертор | 1986 |
|
SU1396225A2 |
| Измерительный преобразователь постоянного тока | 1984 |
|
SU1253306A1 |
| Устройство для ограничения динамических усилий в канатах экскаватора | 1977 |
|
SU609848A1 |
| КОММУТАТОР НА СИММЕТРИЧНЫХ ТИРИСТОРАХ | 2001 |
|
RU2214042C2 |
| ПРЕОБРАЗОВАТЕЛЬ СИНУСОИДАЛЬНОГО НАПРЯЖЕНИЯ В СТАБИЛИЗИРОВАННОЕ ПОСТОЯННОЕ | 2002 |
|
RU2229740C1 |
| Стабилизатор постоянного тока | 1984 |
|
SU1180862A1 |
| Система стабилизации постоянных регулируемых токов для питания N независимых нагрузок | 1987 |
|
SU1524032A1 |
