Изобретение касается управления экскаваторами.
Известно устройство для ограничения динамических УСИЛИЙ в канатах экскаватора, содержащее амортизаторы, встраиваемые
между подвеской ковша и блжом или между блоком и тчшовой стрелы 11.
Это устройство позволяет уменьшить жесткость механизма и за счет этого снизить динамические усилия в канатах. Однако при этом усложняется конструкция экскаватора, а низкая надежность и долговечность амортизаторов не позволяют эффективно решить задачу ограничения усилий.
Наиболее близким по технической сущиос ти к предложенному является устройство для ограничения динамических усилий в канатах экскаватора, включающее двигатель экскаваторного механизма с питающим его преобразователем, на входе которого подклю чей регулятор тсжа, связанный с выходом датчика тока, и датчик скорости 2.
Недостатком этого устройства является недостаточная эффективность ограничения усилий в канат&х при быстром их нараста-
НИИ в режиме стопорения ковша. Устройство вступает в действие только после превышения этими усилиями стопорного значения, поэтому вследствие инерционности механизма и регулятора в этом режиме возможно существенное превышение допустимого значения усилий, что снижает надежи есть экскаватора.
Целью изобретения является повышение надежности экскаватора за счет увеличения эффективности ограничения динамических усилий в канатах в режиме стопорения ковша
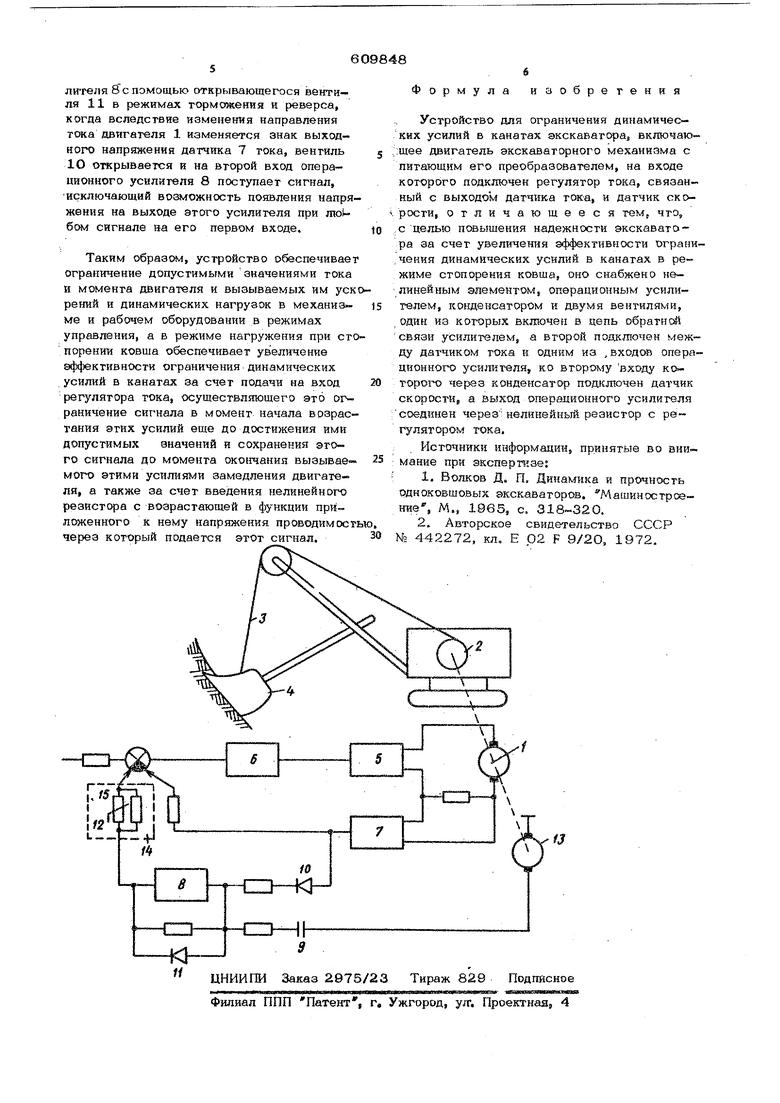
Эта цель достигается тем, что устройсгво дополнительно снабжено нелинейным элементом, операционным усилителем конденсатором и двумя вентилями, один из которых включен в цепь обратной связи усилителем, а второй подключен мегкду датчиком тока и одним из входов операционного усилителя, ко второму входу которого через кО1щенса тор подключен датчик скорос- и, а выход операционного усилителя соединен через нелинейный резидтор с регулятором тока На чертеже изображена схема предлагае мого устройства. Устройство включает двигатель 1, вал которого соедини с лебедкой 2 экскаватор кого механизма, которая через канаты 3 соединена с ковшом 4. Двигатель 1 питает ся от преобразсвателя 5, на входе которого включен регулятор 6 тока, свяаанньгй с вы ходом датчика 7 тока. Дополнительно в устройство включен операционный усчлигеяь 8 с двумя входами. В цепи его первого входа включен конденсатор 9, в цепи второго входа включен первый вентиль Ю, а в цепи обратной связи операционного усилителя включен второй вентиль 11. Выход операционного усилителя 8 через дополни- тельньм нелинейный резистор 12 с возрастающей в функции приложенного к нему напряжения проводимостью роединен со входом регулятора тока 6, Первый вход операционного усилителя 8 с включенным е, его цепи конденсатором 9 соединен с выходом датчика 13 скорости, а второй вход егого операционного усилителя с включен;- haiM в его цепи первым- вентилем 1О сое- динен с выходом датчика 7 тока. Нелинейный . резистор 12 с возрастающей в функции приложенного к нему напря жения проводимостью может быть выполнен например, путем параллельного включения линейного резистора 14 и карборундового резистора 15. Устройство работает следующим образом Вентиль 10 включается так, что при.зна ке тока двигателя 1, соответствующем усилиям в кана1« 3, вызываемым нагрузкой на ковш 4 в процессе копания, он заперт (для прнведемной на чертеже схемы напря- ,Ж8ние навыходе датчика 7- тока при этом имеет отрицательный знак). Включение вентиля 11 согласовано с включением вен7иля 1О так, что при проти воположном знаке тока и соответствующем ему моменте двигателя 1, обеспечивающем ускорение - лебедки- 2 в сторону сматывавания каната 3, вентили 10 и 11 открыты (для приведенной на чертеже схемы это соответствует положительному знаку выхоа ного напряжения датчика 7 тока и отрицатель ному знаку выходного напряжения операцион ного усилителя в). Одновременно полярность подключенного к первому входу операционного усилителя 8 через конденсатор 9 датчика 13 скорости согласуется с полярностью включения венти ля 11 таким образом, что при запертом вентиле 10 вбнтиль 11 также заперт при замедлении двигателя 1 в режиме стопоре ния ковша 4 (при уменьшении положительнсх го напряжения датчика скорости 13). В режиме копания вентиль 10 заперт. Если при этом в результате увеличе гая нагрузки на ковш 4, например, при встрече ковша с непреодолимым препятствием, возрастают усилия в канатах 3, замедляется двигатель 1 .и уменьшается напряжение на выходе датчика 13 скорости, приводя к появлению сигнала на выходе операционного усилителя 8 (вентиль 11 заперт), поступающего на вход регулятора тока 6 через нелинейный резистор 12 с возрастающей в функции приложенного к нему напряжения проводимостью. Двигатель 1 переводится в режим торможения, чем обеспечивается ограничение динамических усилий в канатах 3, причем это ограничение начинает действовать в момент начала возрастания усилий в канатах еще до достижения ими . допустимого значения и продолжается до момента окончания вызываемого этими усилиями замедления двигателя, что увеличивает эффективность ограничения этих усилий. Увеличение проводимости нелинейного резистора 12 с увеличением приложениого к нему выходного напряжения операционного усилителя 8 также увеличивает эффектив ность ограничения усилий в канатах 3, поскольку благодаря этому величина тока через этот резистор, т.е. величина поступающего на вход регулятора тока сигнала, осуществляющего ограничение усилий в канатах, возрастает быстрее, чем возрастает напряжение на выходе операционного усилителя 8. В то же время в режимах управления (разгон, торможение, реверс двигателя) при от сутствии опасности возникновения больших усилий в канатах выходное напряжение ,опе радиониого усилителя 8 равно нулю, благодаря чему регулятор 6 тока осуществляет в этих режимах /ограничение тока и соответствующего ему момента двигателя, а следовательно, и вызываемых этим моментом ускорений и динамических нагрузок в экскаваторном механизме и рабочем оборудовании. Равенство нулю выходного напряжения операционного усилителя 8 в режиме разгона двигателя 1 в сторону наматывания каната 3 на лебедку 2 обеспечивается за счет того, что сигнал, поступающий на первый вход операционного усилителя 8 через кон- денс1атор 9 с выхода датчика 13 скорости вызывает появление на выходе этого операционного усилителя напряжения со знаком при котором открывается вентиль 11, закорачивающий обратную связь этого усилителя. Точно так же осуществляется равенство нулю выходного напряжения операционного уси-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Устройство для управления электроприводом постоянного тока | 1970 |
|
SU515230A1 |
| Система управления механизмом поворота экскаватора-драйглайна | 1977 |
|
SU653347A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство для управления механизмом поворота экскаватора | 1989 |
|
SU1744209A1 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
