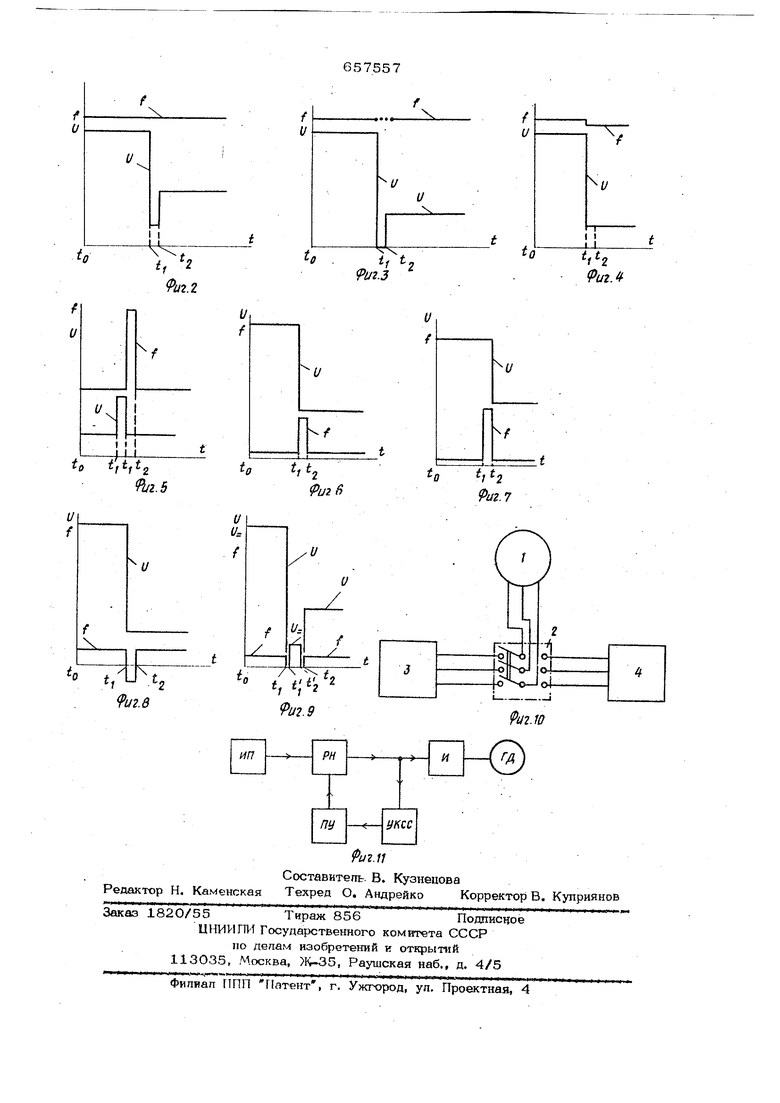
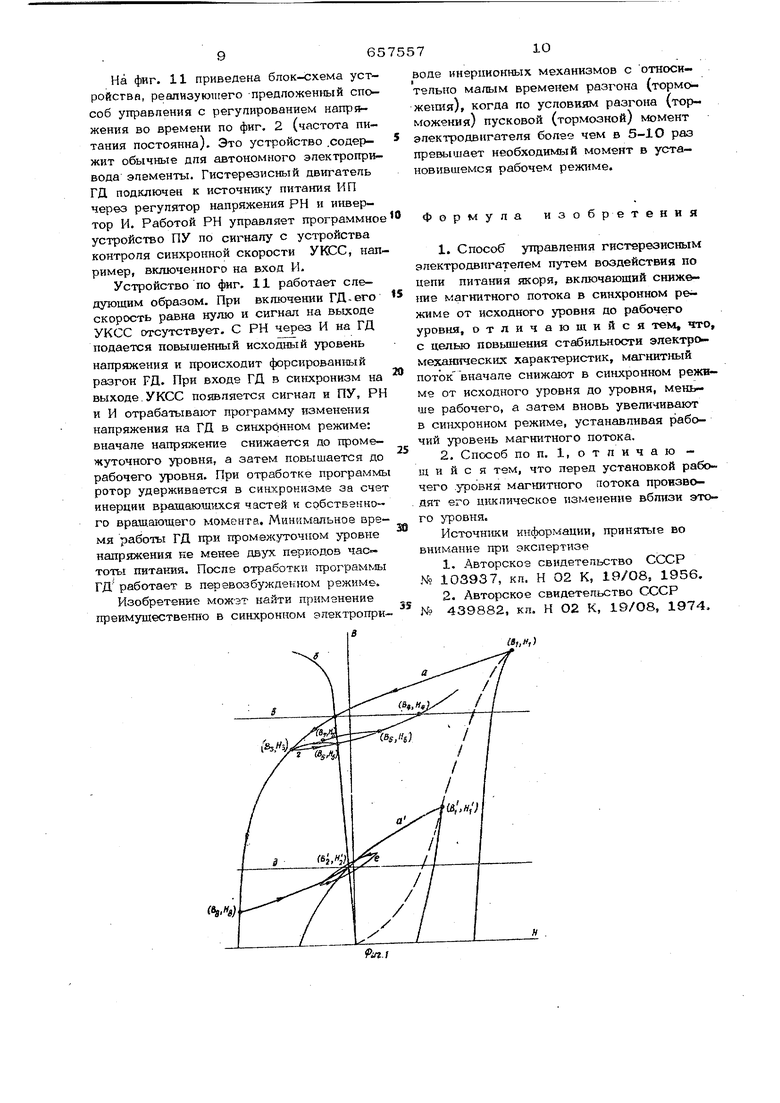
Изобретение относится к области электротехники, а именно к эпектроприьс ду электрических машин гистерезисного типа. Известен спосхзб перевозбуждени$1 гистерезисного электродвигателя путем его кратковременного отключения от источника питания 1 . Электродвигатель отключанзт на такое время, что после его повторного включения ось намагниченности магнитожесткого ротора оказывается повернутой относительно оси синхронновращающегося магнитного поля статора на угол, зависящий от длительности времени отключенного режима. Скорость же ротора аа время отключенного режима снижается до величины, превышающей минимальное значение, от которого после повторного включения ротор синхронизи.руется с магнитным полем без скольже- Ния, изменяя лишь угол нагрузки. Вследствие этого магнитожесткий ротор сохраняет дополнительную намагниченность, приобретенную от амплитудного значе шя тока при переходном электромагнитном процессе после повторного включения, а электродвигатель сохраняет перевозбуждение, О.пя гист езисных электродвигателей преимущественно с форсированным разгоном, когда вращающие моменты при разгоне и в рабочем режиме отличаются более чем в 1О раз, известен способ управления, вклзрчаюпшй частичное размагничнгвание магнитожесткого ротора убывающим переменным относительно него магнитным полем 2 . Частичное размагничивание производят перед снижением магнитного потока в синхронном режиме. Этот способ наиболее близок к предложенному способу по технической сущности и достигаемому эффекту. При кратковременных динамических п&регрузках, действующих на рютор, качаниях ротора, колебании момента сопроти&(тения нагрузки, величины, частоты и фазы напряжения питания и прбчих переходных режимах имеет место гистерезис и иест бильность электромеханических характеристик электродвигателя. Это является следствием отсутствия стабилизации магнитного состояния ротора при управлении гистереаисным электродвигателем. При определенном уровне этих изменений ротор размагничивается, электродвигатель теряет перевозбуждение и, если в новом состоянии его максимальный синхрой ный момент меньше момента сопротивпеHHHt ротор выходит из синхронизма, что требует повторной синхронизации и пере. возбуждения . Осушествпяя частичное размагничивание ротора убывающим пере менным полем, кроме того, снижают и максимальный си11хронный момент элект родвигателя в перевозбужденном режим из-за уменьшения коэрцитивной силы рото ра, что ограничивает уровень снижения магнитного потока, а, следовательно, и уровень повышения КПД. Целью изобретения 5тляется повышени стабильности электромеханических характ ристик и КПД гистерезйсного электродвигателя за счет стабилизации магнитного состояния ротора. Поставпенная цепь достигается тем, что в способе управления гистерезисным электродвигателем, вкаючаюшем подсоеди ненйе эпектродвигателя к источнику, ус:танойление исходного уровня магнитного потока и поспедующее его снижение от исходного уровня в синхронном режиме, магнитный поток вначале снижают в синхронном режиме от исходного уровня до уровня, меньше рабочего, а затем вновь увепичивают в синхронном режиме, устанавливая рабочий уровень магнитного потока, а также тем, что перед установкой рабочего уровня магнитного потока произ водят его циклическое изменение вблизи этого уровня. Изобретение поясняется чертежами. Фиг. 1 нпгаострирует существо физических процессов; на фиг. 2-9 даны конкретные приме|%1 регулирования напряжения и частоты по предлагаемому способу; на фиг. 1О, 11 показаны примеры устройств, реа лизующих предлагаемый способ. На фиг. 1 изображена упрощенная диаграмма--изменения магнитного состояния ротора гистерезйсного электродвигателя при регугафовании его магнитного поток по прототипу и по данному изобретению. По оси ординат отложена индукция В, а п оси абсцисс - напряженность Н в роторе, характеризующие при конкретной геометр 8пехтро1юигателя соответственно магнит( поток и намагничивающую сипу и связаншло с. напряжением, частотой и ком. Магиитпое с(х;тояние ротора в синхронном (JSKHMC для простоты на пиаграм- ме в разные момекгы времени предсгавлено одной точкой с максимальной индукцией. Пунктиром показанаосновная кривая намагничивания ротора. Пусть после входа ротора в синхронизм его магнитное состояние характеризуется вершиной петли гистерезиса а. Исходный уровень магнитной индукции равен В J , а напряженности - Н . При перевозбуждении по прототипу магнитный поток снижается до рабочего уровня и точка магнитного состояния смешается по нисходящей ветви петли о. Если рабочая индукция равна В , а напряженность Ну , когда магнитное состояние находится в точке пересечения нисходящей ветви и кривой Si характеризующей внешнюю по отношению к ротору магнитную цепь, реактивный ток электродвигателя близок к нулю, коэффициент мощности - к единице, а КПД - -к своему максимальному значению. Максимальный синхронный момент электродвигателя при индукции В, приближенно, пропорционален площади, ограниченной осью абсцисс, параллельной ей линией 0 на уровне В, и нисходящей и восходящей ветвями петли гистерезиса а. При случайном снижении индукции в синхронном режиме, ншгример, из-за снижения напряжения питания, до В, и последующем ее повышении до прежнего уровня В. В- магнитное состояние изменяется вначале от (В, , Н, ) до (В, , Н« ) по нисходящей ветви петли а, а далее от (Bg , Hj ) по Босходяоцей ветви частотного никла и до положения (В., Н ). В результате при Вд Bg Н Hj , вследствие чего изменяются электромеханические характеристики двигателя. Если частичное размагничивание ротора в прототипе производят до исходного уровня индукции в синхронном режиме В и напряженности Н , то процессы происходят на петле гистерезиса з аналогично описанным. По данному изобретению перевозбуждение производят не в один, а в два этапа. При этом магнитное, состояние щ)инудительно выводят на частный пикп петли гистерезиса а. Точку отхода частного цикла, например точку (Bj , Н- ) выбирают по ожидаемым колебаниям индукции и напряженности в роторе. В синхронном режиме индукцию понижают от В . не до В, , а до В. , поспе чого OR вуовь увеличивают до рабочего уровня. Рабочую точку цепесообра-чно выбрать, как и paTiee на кривой (У, т. э, точку (EJj , Hg ). где восходжяая вотвь частного цикла пересекается с кривой 5. В результате поспе выполнения указанных действий при случайном снижении индукции в синхронном режиме до В, и последующем ее повышении до прежнего рабочего уровня В 1агнитное состодаше изменяется вначале по нисходящей, а затем по восходящей ветви частного цикла . В итоге магнитное состояние вновь возвращается в точку (Вс , Н ) и электромеханические характеристики электродвигателя сохраняются на прежнем уровне. При случайном увеличении индукции выше В с , например до Bg , и последующем ее снижении до прежнего уровня В. Вс нестабильность характеристик обусповлена лишь несовпадением восходящей и нисходящей ветвей частного цикла г. Процессы на частных циклах петпи гистерезиса р более линейны, чем на ее нисхбдящей ветви. По этому при выполнении действий по данному изобретению и положению рабочей точки на частйом цикле 8 (Bg , Н ) харак теристики электродвигателя более стабиль ны в сравнении с прототипом. При форсированном разгоне, когда пусковой момент более чем в 5-10 раз превышает момент сопротивления нагрузки, целесообразно понизить индукцию в синхронном режиме от В не до В , а до В 1 после чего увеличить В .На фиг. 1 псказаи случай, когда рабочая точ ка ротора располагается в (В i Hg ) дпя обоих,случаев управления ( по данному изобретению и по прототипу). При равенстве КПД управление по данному изобретению имеет следующие преимущества. Во-первых, характеристики электродвигате ля более стабильны (рабочая точка нахо- дится на частном цикле петпи а, а не на нисходящей ветви петпи в ), и, во-вторых, электродвигатель при индукции В развивает больший максимальный синхронный момент (площадь, ограниченная осью абсцисс, параллельной ей линией 3 и ветвями петпи а больше площади, ограниченной той же осью и линией и ветвями пет ли а ). Увеличение момента может быть использовано дпя большего снижения ин- дукции в сравнении с В , а следовательно, и для большего повышения КПД, На фиг. 1 для примера показан стабилизированный частный цикл е, который уста гавпивается при циклическом изменении магнитной индукции возле рабочего В. . Полная стабилизация магнитных свойств происходит примерно на десятом цикла. Рассмотрим несколько конкретных примеров применения управления гистерезискым электродвигателем по изобретению. На фиг. 2-9 по оси абсцисс отложено время 1, на оси ординат - частота f и напряжение питания U элекгродвигагеля. Законы регулирования напряжения и чаототы во времени содержат три характерных участка. Первый участок (в интерва-. пё времени от t до t )соответствует разгону электродвигателя и установлению исходного уровня магнитного потока в синхронном режиме, второй ( от t. до)снижению магнитного потока и для фиг. 4-9 его циклическому изменению, а третий (после t., ) - повышению магнитного потока до рабочего уровня и синхронизации ротора с рабочей частотой питания. В первом примере (см, фиг. 2) гистерезисный электродвигатель с неподвижным ротором в момент времени t подключают к источнику переменного тока, например, с напряжением 380 В и частной 5О Гц. На первом участке, в интервале времени t - t.. ротор разгоняется, входит в синхронизм н к моменту време- ни t в нем устанавливается исходный уровень индукции, равной например 1,1Т. Далее, в момент времени t , электродвигатель переключают на напряжение, например, 73 В той же частоты 50 Гц, вследствие чего индукция в роторе понижается от 1,1 Т до 0,37 Т. Под пониженным напряжением электродвигатель выдерживают в течение времени от t . до 15 (второй участок), длительность которого равна, например, длительности пяти периодов напря хения, т.е. 0,1 с. За это время ротор в силу своей инерционности, например, сохраняет скорость неизменной, поворачиваясь на пять оборотов. В момент времени t электродвигатель переключают с напр5окения 73 В на напряжение 127 В, увеличивая тем самым индукцию в роторе от 0,37 Т до, например, 0,5 Т. После момента времени t. (третий участок) электродвигатель при напряжзнии 127 В синхронизируется и устанавливается рабочий перевозбужден гй режим, например, с чисто активным потребляемым током и коэффициентом мошностн, равным единице. 765 В остальных примерах управления (см. 4ФИГ. 3-9) на первом участке разгон и установпенйе исходного уровня потока в синхронном режиме производят, как ив первом примере, при постоянных напряже- НИИ и частоте, кроме примера по фиг, 5, где после входа ротора в синхронизм его дополнительно подмагнмчивают кратковре.менным увеличением напряжения в интервале времени t - t . Дапее, на втором участке, магнитный поток снижают кратковременным изменением напряжения (см. фиг. 2) коротким замыканием обмоток статора (см. фиг. 3, где короткое замыкание условно обозначено снижением напряжения до нуля и обрывьм пннии частоты; точки здесь означают неизменность частоты тока в обмотке для всего диапа- зонй времени, включая и интервал короткого замь кания t - 2) примерах по фиг. 4-9 одновременно со снижением потока производят и его циклическое изменение уменьшением напряжения и небольшим уменьшением частоты (см. фиг. 4), увеличением частоты (см. фиг. 5, 6, 7), противовкгаочением (см. фиг. 8, где условно показано изменение знака частоты, что соответствует изменению направления вращения попя статора), переключением обмотки на источники постоянного тока с напряжением U (см. фиг. э) После этого, на третьем участке, магнитный поток увеличивает повышением напряжения (см. фкг. 2, з) снижением чгютоты до 11режнего уровня (см. фиг. 5, 6, 7 увеличением частоты до прежнего уровня и напряжения (см. фиг. э). В примерах по фиг. 4, 8 после повторной синхронизации ротора с полем магнитный поток автоматическн увеличивается по сравнению с его минимальным значением при циклическом изменении на втором участке. В примерах по фиг. 4, 5, 6, 8 псжазаны частные случаи, когда равшл напряжения на втором и третьем участках, а по фиг. 7 - одинаковы напряжения на первом и втором участках. Комбина С ией приемов всех примеров можно увеличит - количество возможных вариантов управления. Все указанные в примерах действия по изменению напряжения и частоты производят за врек|Я, в течение которого скорост ротора снижается до величины, превышаю щей минимальное значение, от которого стабилизированный магнитожесткий ротор после установления рабочих значений напряжения и частоты синхронизируется с 7 магнитным полем без скольжения, изменяя лишь угол нагрузки. В устройстве, блок-схема которого изображена на фиг. 10, nanpscKefrae и частоту питания гистерезисного двигателя 1 изменяют во времени в соответствии с фиг. 4. При этом электромагнитные процессы в двигателе провскодяг аналогично тому, как это бьшо описано выше (см. фиг. l). Устройство по фиг. 1О работает спе-. дующим образом. Трехфазный двухполюсный гистерезисный двигатель 1 с помощью переключателя 2 на три положения (одно положение нейтральное) подключают на период разгона к пусковому источнику питания 3 с напряжением и частотой, равным, например, 18ОВ и 1О5О Гц. После подключения ротор двигателя 1 ускоряется. достигает синхронной скорости 1050 об/с, и в нем устанавливается исходный уровень магнитного потока и индукции, равной, например, 1,1Т. Далее двигатель 1 перекгаочатепем 2 отключают от пускового источника 3 и подк/почают к рабочему источнику хштания 4 с меньшими значениями напряжения и частоты (по сравнению с источником З). Напряжение на двигателе 1 уменьшают в большей степени, чем частоту, наприм до 36 В и 1ООО Гц, вследствие чего магнитный поток и индукция-снижаются. За время переключения скорость ротора уменьшается незначительно, напрнм до 1О48 об/с и превышает рабочую синхронную скорость 10ОО об/с, соответствующую частоте 10ОО Гц ра6о чего источника 4. По этой причине пюсле переключения намагниченный при пуске ротор продолжает тормозиться, а положэние оси его намагниченности относительно оси поля статора периодически изменяется во времени. При этом индукция в роторе периодически изменяется с частотой скольжения от своего минимального значения, равного, например, 0,25 Т в положении наибольшего размагничивания полем статора, до максимального, например 0,38 Т в положении наибольшего подмапничивания. При достижении ротором скорости, например, 1О15 об/с, он синхронизируется с частотой 100О Гц рабочего источника 4 без скольжения, изменяя лишь угол нагрузки, после чего в нем устанавливается рабочий уровень иедукции, равной, например, 0,34 Т. Далее электродвигатель 1 работает в установившемся перевозбужденном режиме с синхронной скоростью вращения ротора 10ОО об/с. На фиг. 11 приведена бпок-схема устройсгвн, реализующего -предложенный спо соб управления с регулированием напряжения во времени по фиг. 2 (частота питания постоянна). Это устройство .содержит обычные для автономного электропривода элементы. Гистерезисный двигатель ГД подключен к источнику питания ИП через регулятор напряжения РН и и шертор И. Работой РН управляет программно устройство ПУ по сигналу с устройства контроля синхронной скорости УКСС, нап ример, включенного на вход И. Устройство по фиг. 11 работает следующим образом. При включении ГД-его скорость равна нулю и сигнал на выходе УКСС отсутствует. С РН через И на ГД подается повышенный исходный уровень напряжения и происходит форсированный разгон РД. При входе ГД в синхронизм на выходе.УКСС появляется сигнал и ПУ, РН и И отрабатывают программу изменения напряжения на ГД в синхронном режиме:
вначапе напряжение снижается до промежуточного уровня, а затем повышается до рабочего уровня. При отработке программы ротор удерживается в синхронизме за счет инерции вращающихся частей и собственного вращающего момента. Минимальное время работы ГД при промежуточном уровне напряжения ке менее двух периодов частоты питания. Поспе отработки программы ГД работает в перевозбуждекл-юм режиме. Изобретение можэт найти применение преимущественно в синхронном электропричий уровень магнитного потока.
2. Способ по п. 1, о т л и ч а ю щ и и с я тем, что перед установкой рабо чего .уровня магнитного сютока производят его цшспическое изменение вблизи этого фОВНЯ.
Источники ин4хзрмации, принэтые во внимание при экспертизе
1.Авторское свидетельство СССР № 103937, кп. И 02 К, 19/О8, 1956.
2.Авторское свидетельство СССР
N9 439882, кп. И О2 К, 19/О8, 1974.
(В,,Н,) воде инерционных механизмов с относительно малым временем разгона (тормо- же1Шя), когда по условиям разгона (торможения) пусковой (тормозной) момент электродвигателя более чем в 5-10 раз превышает необходимый момент в установившемся рабочем режиме. Формула изобретения 1. Способ управления гистерезисным электродвигателем путем воздействия по цепи питания якоря, включающий сниже1ше магнитного потока в синхронном ре жиме от исходного уровня до рабочего уровня, отличающийся тем, что, с целью повышешш ст ильности электр{ мехаштческих характеристик, магнитный поток вначале снижают в синхронном реже- ме от исходного уровня до уровня, меньше рабочего, а затем вновь увеличивают в си11хронном режиме, устанавливая рабо
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления гистерезисным электродвигателем | 1972 |
|
SU439882A1 |
| Способ пуска гистерезисного электродвигателя | 1980 |
|
SU997214A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
| Гистерезисный электродвигатель | 1977 |
|
SU748695A1 |
| Способ контроля синхронной скорости перевозбужденного гистерезисного электродвигателя | 1976 |
|
SU600667A1 |
| СПОСОБ ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ РЕАКЦИЕЙ ЯКОРЯ | 2011 |
|
RU2465713C2 |
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Ротор гистерезисного электродвигателя | 1988 |
|
SU1658301A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| ПУСКОВОЕ УСТРОЙСТВО | 2009 |
|
RU2411631C1 |