Изобретение относится к области электрических машии, а имен;ю к уаравляемым гистерезисным электродвигателям, работа1ош,им в иеревозбуждеином режиме, и может быть использовано для контроля их синхронной скорости.
Известны способы контроля синхронной скорости перевозбужденного гистерсзисного электродвигателя, основанные на фиксаиии изменения тока, коэффициента мощности, активной или реактивной мощности электродвигателя при изменении его степени возоуждения, связанной с мгновенным (в пределах одного оборота) изменением синхронной скорости 1 и 2. Как известно, при увеличении степени возбуждения гистерезисного электродвигателя уменьшается потребляемая им реактивная мощность, что приводит к уменьшению тока, активной мощности, к увеличению коэффициента мощности и к.и.д. Наиболее онтимальным рабочим режимом, с точки зрения энергетических характеристик, является неревозбужденне электродвигателя до полной компенсации реактивной составляющей тока. Повышение степени возбуждения гистерезиского электродвигателя достигается при этом уменьшением магнитного потока в синхронизме путем, нанример, уменьшения напряжения питания 2. Однако рабочий режим перевозбужденного гнстерезисного электродвигателя может оыть нарушен ирн изменении его сии.хроиной скорости из-за вариации iiaгрузки электродвигателя, возмущениях со стороны источника иитания и т. д. При этом резко y.vyдщaютcя эиергетические показатели рабочего режима электродвигателя (повышается ток, иотребляемая мощность, уменьшается коэффициеит мощности и к.н.д.). Изменение синхронной скорости может быть незначительным (в пределах од-юго оборота), кратковременным и в дальнейшем электродвигатель может оставаться в синхронизме, рабоч11Й режим его нарущится, нужно электродвигатель либо отключить, либо повторнть процесс неревозбуждеиия. Согласно таким способам контроля рабочего режима измеряют один из параметров, характер;1зующ 1Й рабочий режим (ток, мощность, коэффициент мощности), сравнивают его с заранее установленным уровнем этого параметра и ио величине и знаку отклонения судят о нарушении синхронно) скорости.
Недостатком этих способов является то, что измеиеиие тока, мощиости, коэффицие}1та МОЩНОСТГ1 ири изменении крагности перовозбуждення происходит монотонно, причем в зоне наиболее оптимальных коэфф1щие1 тов перевозбуждения (в зоне полной компенсации реактивной составляющей тока) изменение параметров незначнтельно. Это уменьшает
точность контроля. Другой недостаток состоит в том, что для реализации этих способов необходимо номестнть в силовую цепь двигателя или источников его нитания 2 датчики (резисторы, трансформаторы н т. д.) для фиксации на них контролируемых нараметров. Это снижает надежность электродвигателя, а нодчас делает контроль вообще невозможным, еслн но каким-либо иричинам достун к цепи нитання электродвигателя закрыт (как, нанример, может быть в автоновном электронриводе гиронрибора).
Известен также способ контроля синхронной скорости перевозбужденного гистерезисного электродвигателя, основанный на измерении индукции внешнего магнитного ноля рассеяния электродвигателя, выделении из нее контролируемого сигнала и сравнении этого сигнала с сигналом уставки 3j. Такой способ наиболее близок по решаемой технической задаче к предлагаемому.
Недостатком способа является малая точность контроля синхронной скорости.
Цель предложенного нзобретепня - повышение точности контроля рабочего режима неревозбуукдеиного гистерезисного электродвигателя.
Согласно нредлагаемому снособу выделяют составляюи;ую нндукцин внешнего магнитного поля рассеяния с частотой напряжения питания электродвигателя, сравнивают фазы выделенного сигнала н ианряжепня питания, формируют контролируемый сигнал, пропорциональный разности этих фаз, и по превышению контролируемого сигнала над cHiналом уставки судят о синхронной скорости электродвигателя.
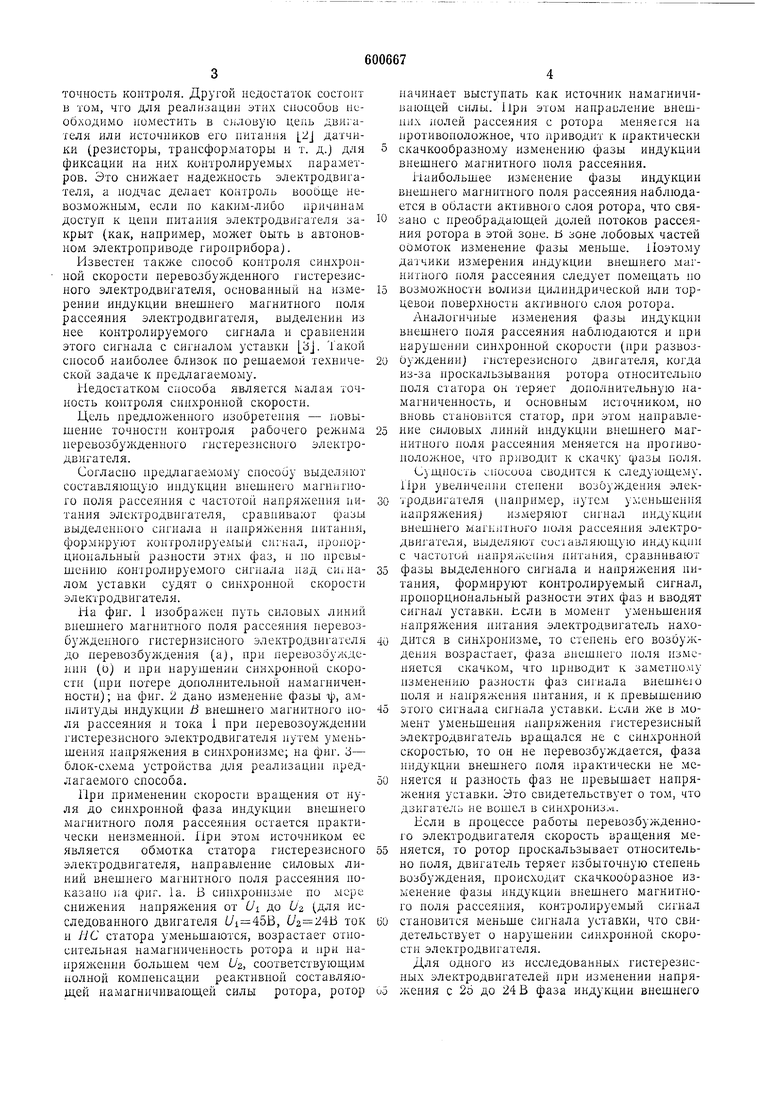
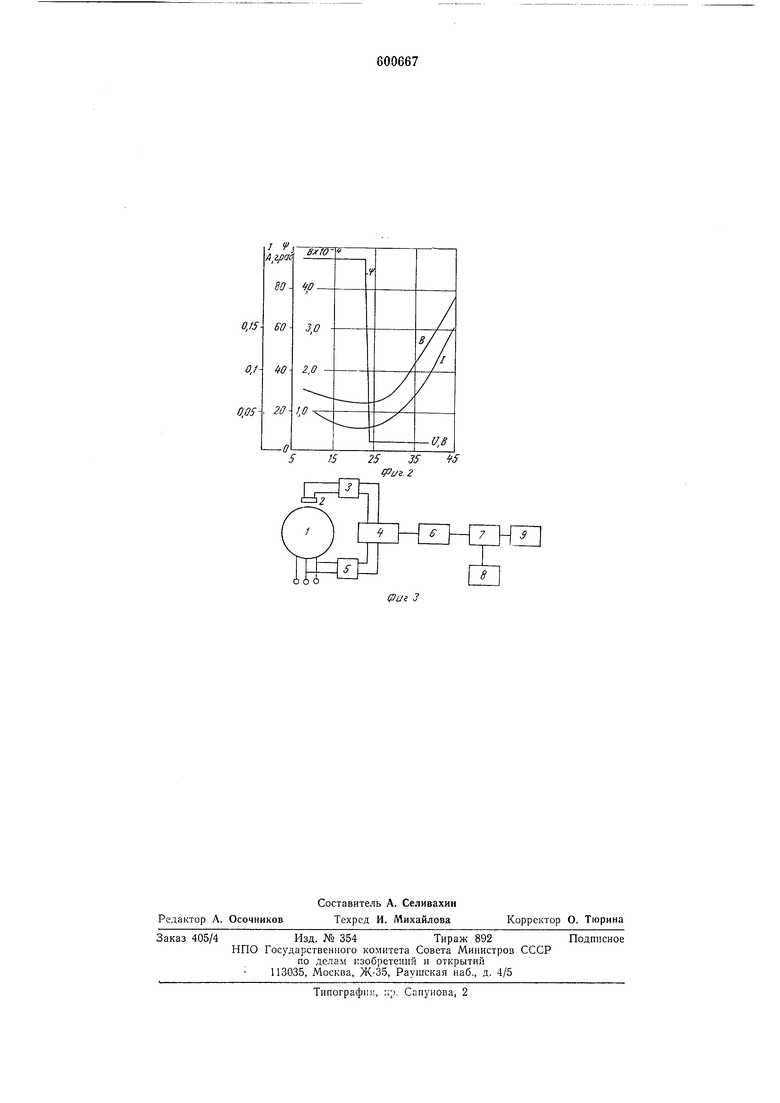
На фнг. 1 изображен путь силовых линий внешнего магнитного ноля рассеяния неревозбужденного гистеризисного электродвигателя до перевозбуладения (а), при перевозбуждении (б) и при нарушении синхронной скорости (при потере дополнительной намагниченности) ; на фиг. 2 дано изменение фазы тр, амнлитуды индукции В внешнего магнитного ноля рассеяния и тока I при перевозоуждении гнстерезисного электродвигателя путем уменьшения напряжения в синхронизме; на фиг. 3- блок-схема устройства для реализации предлагаемого способа.
При применении скорости враш,ения от нуля до синхронной фаза индукции внешнего магнитного поля рассеяния остается практически пеизменной. При этом источником ее является обмотка статора гнстерезисного электродвигателя, направление снловых линий внешнего магнитного поля рассеяния показано па фиг. 1а. В синхронизме но мере снижения напряжения от Ui до 1/2 (для исследованного двигателя (, (72-24Б ток н ПС статора уменьшаются, возрастает относительная намагниченность ротора и нри напряжепии большем чем Uz, соответствуюш,нм полной комнепсации реактивной составляющей намагннчивающей силы ротора, ротор
начинает выступать как источник намагничиваюгцей силы. Нри этом нанравленне внешних нолей рассеяния с ротора меняегся на нротивоположное, что приводит к практически скачкообразному изменению фазы индукции внешнего магнитного поля рассеяния.
Наибольшее изменение фазы индукции внешнего магнитного поля рассеяния наблюдается в области активного слоя ротора, что связано с нреобрадаюш,ей долей нотоков рассеяния ротора в этой зоне. Ь зоне лобовых частей обмоток изменение фазы меньше. Поэтому датчики измерения индукции внешнего магнитного поля рассеяния следует помешать по
возможности волизн цилиндрической или торцевой иоверхности активного слоя ротора.
Аналогичные изменения фазы индукции внешнего ноля рассеяния наблюдаются и нри нарушении синхронной скорости (при развозбуждении) гистерезисного двигателя, когда из-за проскальзывания ротора относнтельпо ноля статора он теряет донолнительную намагнпченноеть, и основным источником, по вновь станов тся статор, нри этом направление силовых линий индукции внешнего магнитного поля рассеяния меняется на нрогивоноложное, что приводит к скачк)- фазы ноля. Сущность сиосооа сводится к следующему. Нри увеличении стеиени возбуждения электродвигателя (например, путем уменьшения напряжения) измеряют сигнал нндукции внешнего магнитного поля рассеяпия электродвигателя, выделяют сос1авляюшую индукцпп с частотой папряукеиия питания, сравнивают
фазы выделенного сигнала и напряжения нитания, формируют контролируемый сигнал, нропорциональпый разности этих фаз и вводят сигнал уставки. Ьсли в момент уменьшения напряжения нитання электродвигатель находится в синхронизме, то стенень его возбуждеппя возрастает, фаза впешпего ноля нзмсняется скачком, что прпводит к заметпому изменению разности фаз сигнала внешнею поля и напряжения питания, и к превышению
этого сигнала сигнала уставки. Ьсли же в момент уменьшения напряжения гистерезисный электродвигатель вращался не с синхронной скоростью, то он не перевозбуждается, фаза индукции внешнего ноля нрактически не меняется и разность фаз не превышает напряжения уставкн. Это свидетельствует о том, что двигатель не вошел в синхрониз х.
Еслн в процессе работы перевозбужденного электродвигателя скорость вращения меняется, то ротор проскальзывает относительно поля, двигатель теряет избыточную стенень возбуждения, происходит скачкообразное изменение фазы индукции внешнего магнитного поля рассеяния, контролируемый сигнал
становится меньше сигнала уставки, что свидетельствует о нарушении синхронной скорости электродвигателя.
Для одного из исследованных гистерезисных электродвигателей нри изменении напряжения с 25 до 24 В фаза индукцни внешнего
поля изменилась на 150 эл. град., а при кратковременном выходе этого двигателя из синхронизма при В изменение фазы - 120-150 эл. град.
Измерение такого уровня изменения фазы может быть достаточно просто реализировано, например, устройством, блок-схема которого показана на фиг. 3.
Гистерезисный электродвигатель 1 создает внешнее магнитное поле рассеяния, которое измеряется датчиком 2. Сигнал с датчика 2 подается на пропускающий фильтр 3 на частоте напряжения питания и далее на один из входов измерителя фаз 4. На другой вход измерителя фаз 4 через фильтр первой гарМОНИКИ 5 подключено напряжение питания электродвигателя 1. Сигнал с выхода измерителя фаз 4 формируется в устройстве 6 в сигнал постоянного тока, пропорциональный разности фаз индукции и напряжения питания, и в устройстве сравнения 7 сравнивается с наперед заданным напряжением узла уставки 8. По величине и знаку отклонения выходного напряжения устройства сравнения 7, которое измеряется индикатором 9, контролируют синхронную скорость перевозбужденного гистерезисного электродвигателя.
Устройство для осуществления способа работает следующим образом.
До перевозбуждения электродвигателя (в пусковом или синхронном режиме) измеряется сигнал индукции внешнего магнитного поля рассеяния датчика 2. Сигнал с выхода датчика 2 через фильтр 3 подается на один из входов измерителя фаз 4, где его фаза сравнивается с фазой первой гармоники напряжения питания. Выходной сигнал измерителя фаз 4 формируется в устройстве 6 в напряжение постоянного тока, амплитуда которого пропорциональна разности фаз, и подается на устройство сравнения 7. Изменяя величину и знак сигнала уставки 8, добиваются полной компенсации контролируемого сигнала, о чем судят по индикатору 9. При перевозбуждении гистерезисногц электродвигателя происходит скачкообразное изменение фазы индукции внешнего магнитного поля рассеяния, что приводит к изменению разности фаз этого сигнала и нанряжения питания, и к превышению контролируемого сигнала под сигналом уставки 8. На индикаторе 9 появляется напряжение, свидетельствующее о наступлении рабочего режима.
При нарушении рабочего режима фаза внешнего поля меняется скачком, при этом знак изменения фазы противополол ен тому, который имеет место при перевозбуждении и примерно равен ему по амплнтуде. О нарушении рабочего режима свидетельствует уменьшение показаний индикатора 9.
Предложенный способ позволяет повысить точность контроля рабочего режима перевозбужденного гистерезисного электродвигателя.
Формула изобретения
Способ контроля синхронной скорости перевозбужденного гистерезисного электродвигателя, основанный на измерении индукции внешнего магнитного поля рассеяния электродвигателя, выделении из нее контролируемого сигнала и сравнеипи этого сигнала с сигналом уставки, отличающийся тем, что, с целью повышения точности, выделяют составляющую индукции внешнего магнитного поля рассеяния с частотой напряжения питания электродвигателя, сравнивают фазы выделенного сигнала и напряжения питания, формируют контролируемый сигнал, пропорциональный разности этих фаз, и по превышению контролируемого сигнала над сигналом уставкн судят о синхронной скорости электродвигателя.
Источники информации, принятые во внимание при экспертизе
1.Гуров Г. И. и др. Способы перевозбуждения гистерезисных гироскопнческих электродвигателей. В сб.: «Доклады научно-технической конференции по итогам научно-исследопательских работ .:а 1968-1969 г.т.. Секция электромеханическая. Подсекция электрических машин и преобразователей автономных электросистем., м ., МЭП, 1969, с. 121-124.
2.Мастяец П. 3.. Орлов И. И. Гистерезисные электродвигатели, Ч. 1, М., МЭП, 1963. с. 188-208.
3.Авторское свидетельство СССР Л 173486, кл. С 01Р 3/54, 1963.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления гистерезисным электродвигателем | 1972 |
|
SU439882A1 |
| Способ управления гистерезисным электродвигателем | 1975 |
|
SU657557A1 |
| ГИСТЕРЕЗИСНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1973 |
|
SU393797A1 |
| Способ пуска гистерезисного электродвигателя | 1980 |
|
SU997214A1 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| Гистерезисный электродвигатель | 1977 |
|
SU748695A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2605088C1 |
| Способ перевозбуждения гистерезисного электродвигателя | 1971 |
|
SU577632A1 |
| ПУСКОВОЕ УСТРОЙСТВО | 2009 |
|
RU2411631C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2553446C2 |
1,г.
005
