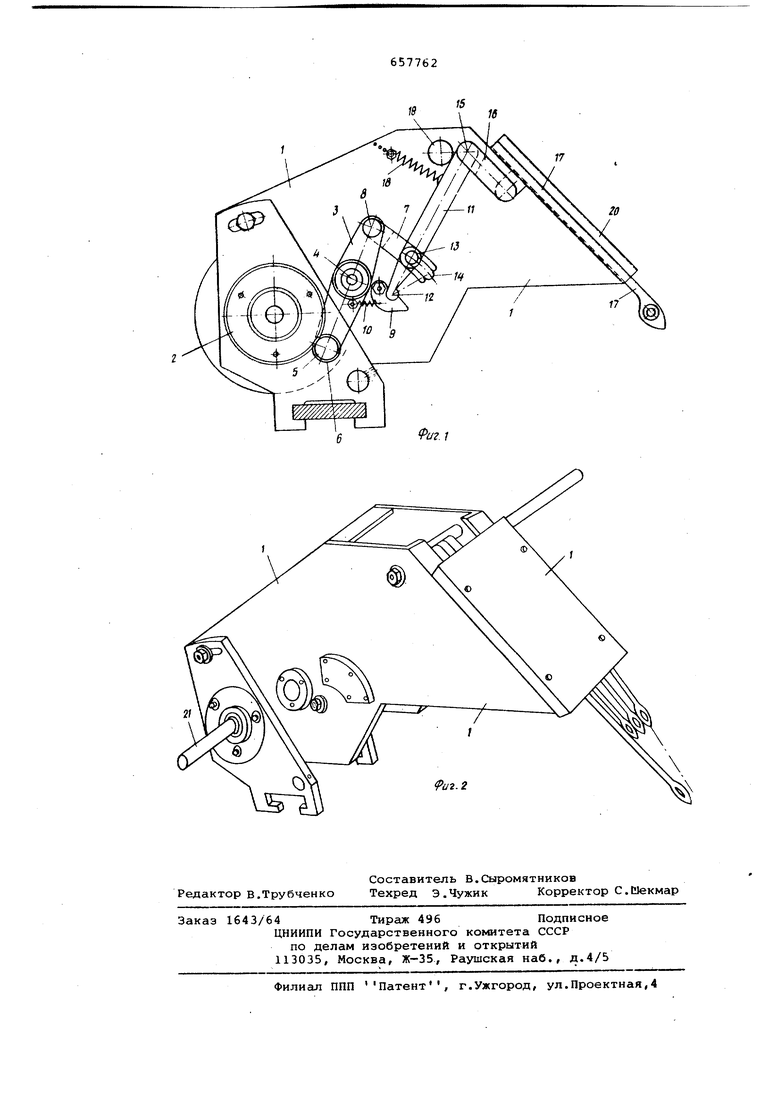
и стремится повернуть его к неподвиж ному упору 19. В направлякяцих 20 подвижно установлены нитеводители 17 Ось 21 соединяет кулачок 2 с приводо станка (не показан). Устройство работает следующим образом. Собачка 9 переводится сердечником электромагнита в рабочее положение (см. фиг. 1). При этом конец 1 двуплечего рычага 11 устанавливается в гнезде собачки 9 с возможностью вращения. В результате вращения кулачка 2 коромысло 3 поворачивается и через шток 7 поворачивает рычаг 11 относительно конца 12 по часовой стрелке. Верхний конец 15 рычага 11 передает через тягу 16 поступательно движение соответствующему нитеводителю 17, который скользит по направляющей 20 в рабочее положение. В соответствии с заданным на кулачке 2 законом движения нитеводитель 17 посредством названной кинематической цепи возвращается в исходное положение при дальнейшем вращении кулачка 2. При этом рычаг 11 поворачивается коромыслом 3 через шток 7 относитель но конца 12 против часовой стрелки. При необходимости смены утка сердечник электромагнита освобождает собач ку 9 и она под действием пружины 10 переводится в холостое положение (не показано). Одновременно сердечник другого магнита переводит в рабочее положение другую собачку (по числу нитеводителей). Конец 12 рычага 11 освобождается из гнезда собачки 9, а пружина 18 прижимает рычаг 11 к упору 19. Очередной поворот коромысла 3 кулачком 2 приводит к повороту рычага 11 через шток 7 относительно конца 15 на упоре 19. Тяга 16 в этом случае остается непо2движной, а нитеводитель 17 - в исходном положении. Таким образом осуществляется принудительное перемещение нитеводителей в рабочее и холостое положения в соответствии с заданным на кулачке 2 законом движения или выстой в исходном положении в соответствии с заданной программой смены утка. Устройство может быть использовано в бесчелночных ткацких станках, имеющих высокую производительность и вырабатывающих многоцветные ткани. Формула изобретения Устройство смены утка для бесчелночного ткацкого станка, содержащее установленные с возможностью возвратно-поступательного перемещения в направляющих, расположенных под углом одна к другой, нитеводители, каждый из которых посредством кинематической цепи соединен с коромыслом кулачкового механизма, и управляющие электромагниты,, отличающееся тем, что, с целью повышения производительности, каждая из кинематических цепей имеет смонтированный в корпусе двуплечий рычаг, неподвижный упор и собачку, взаимодействующую с сердечником управляющего электромагнита, при этом одно плечо рычага подпружинено, кинематически связано с нитеводителем и установлено с возможностью контактирования с неподвижным упором, а другое плечо установлено с возможностью контактирования с собачкой, причем ось качаиия рычага кинематически связана с коромыслом кулачкового механизма. Источники информации, принятые во внимание при экспертизе: 1. Патент США №3565121, кл.139-122, 1971..