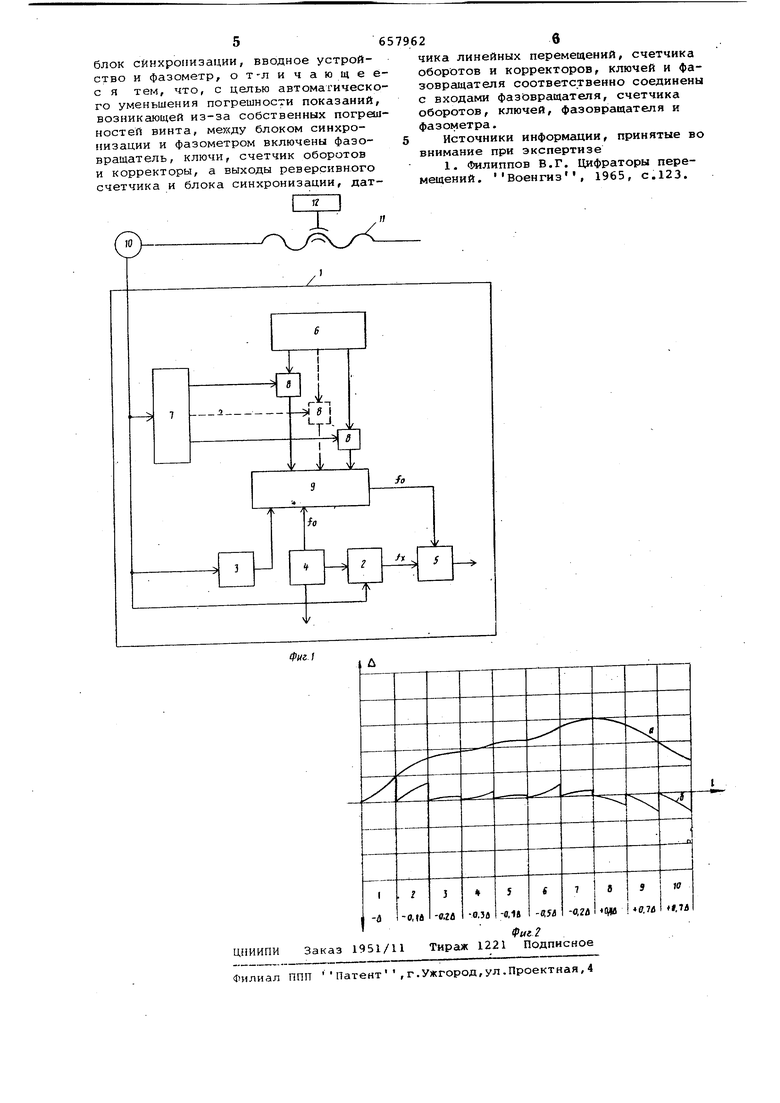
(54) УСТРОЙСТВО ЦИФРОЮП ИНДИКЙЦИИ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИП оборотов и корректоры, выходы реверсивного счетчика и блока синхронизации соединены с основными выxoдa Ш фаэовращения, выход датчика дополнительно с входом счетчика оборотов, выходы счетчика оборотов и корректоров - с входами к/шзчей, выходы ключей - с yпpaвляюiI и /IИ входами фазовра щения, а выход фазовращения - с входом фазометра, что позволяет смещать фазу опорного сигнала в определенных точках на заранее определенную величину погрешности. На фиг.1 дана схема описываемого устройства; на фиг.2 - график, поясн юпшй процесс коррекции .. Устройство 1 содержи uao,-ui:jrf yci ройство 2, предназначенное для фильт рации, усиления, формирования и времанной привязки измерительного сигна ла; реверсивный счетчик 3 для подсче та количества полных циклов изменеНИН фазы измерительного сигналапо отношению к фазе,опорного сигнала, а также для анализа знака координаты контролируемого перемещения; блок 4 синхронизации, формирующий тактовые сигналы, сигналы фазовых констант и РПД последовательностей импульсов; фазометр 5 для измерения разности фаз измерительного и опорного сигнэ.лов в интервале до 360®; корректор 6 зaдшoщIiй соответствующую величину коррекции; счетчик 7 для подсчета об ротов; ключи 8, подключающие тот или иной корректор к фазовращателю 9. С устройством цифровой индикации электрически связан датчик 1,0 линейных перемещений,который соединен с. винтом 11 и с рабочим органом 12. На фиг,2 приняты следуюь-ще обозна чения t - длина винта; Л величины собственной погрешнос ти винта; а- кривая, изображающая распределение собственных погрешностей винта б- кривая, изображающая погрешность показаний после коррекции, 110 - номера корректоров, ; ,-Д; -0,1 Д; -О, 24.. , 7Л величин коррекции, набираемая на корректорах Устройство работает следующим образом. При вращении винта 11 вращается соединенный с ним вал датчика 10. Ра бочий орган 12 получает линейное пер мещение вдоль винта 11. Сигналы с датчика lO поступают в устройство 1 цифровой индикации. Перед работой на станке измеряетс величина собственных погрешностей ви та и определяются точки винта, в которых необходимо произвести корракци погрешности. Целесообразно расстояни между .точками винта выбрать кратными величине, эквивалентной перемещению на один оборот винта, что значительн упрощает схему. Как правило, ходовые винты в станках имеют шаг 5,10,12 мм линейного перемещения и при перемещении на один шаг собственная погрешность винта имеет незначительную величину, поэтому достаточно считать обороты винта (т.е. обороты ротора датчика, соединенного с винтом). Каждый переключатель корректоров б соответствует определенной точке коррекции, а величина коррекции набирается на корректоре. С помощью счетчика 7 оборотов при поступлении сигналов с датчика 10 определяют положение рабочего органа 12 относительно винта 11 и в точках корреко.ии со счетчика 7 снимаются сигналы, которые через соответствующие ключи 8 подключают тот или иной корректор к фазовращателю .9. Приходящие сигналы от датчика 10 через вводное устройство 2 .попадают на фазометр 5, где .пришедший сигнал f,, сравнивается с опорным сигналом fp, прошедшим через фазовращатель 9. Разница между фазами сигналов f и fх- эквивалентна величине линейного перемещения рабочего органа. Вточках коррекции, определенных счетчиком 7, через ключи 8 сигналы с корректоров б поступают на .фазовращатель 9, где происходит сдвиг фазы опорного сигнала на величину коррекции погрешности. На эту же величину изменится и разность фаз между опорным fo и пришедшим от датчика сигналой fу, т.е. величина собственной погрешности винта будет автоматически учтена при показании величины линейного перемещения. При вращении винта 11 в обратную сторону (двюкение рабочего органа в обратном направлении) знак направления величины коррекции долженбыть изменен на противоположный. Для этого используется сигнал, определяющий направление перемещения, который снимается с реверсивного счетчика 3 и подается в фазовращатель 9, что вызывает смещение фазы опорного сигнала fo в противоположную сторону. О.порный сигнал fg; вырабатывается в блоке 4 синхронизации. « Как видно из графика (фиг.2), величина погрешности в точках коррекции будет равна нулю, а в промежуточных не будет превьлиать заданных пределов При движении рабочего органа от начала в конец винта знак величины коррекции сохраняется, таким, каким он Набран на корректорах, а при движении рабочего орган.а в обратном направлении знак коррекции изменяется на противоположный. Формула изобретения Устройство цифровой индикации линейных перемещений, содержащее соединенный с винтом датчик линейных перемещений, реверсивный счетчик. блок синхронизации, вводное устройство и фазометр, от-л и чающеес я тем, что, с целью автомагического уменьшения погрешности показаний, возникающей из-за собственных погрешностей винта, между блоком синхронизации и фазометром включены фазовращатель, ключи, счетчик оборотов и корректоры, а выходы реверсивного счетчика и блока синхронизации, дат62 чика линейных перемещений, счетчика оборотов и корректоров, ключей и фазовращателя соответственно соединены с входами фазовращателя, счетчика оборотов, ключей, фазовращателя и фазометра. Источники информации, принятые во внимание при экспертизе 1. Филиппов В.Г. Цифраторы перемещений. Военгиз, 1965, с.123.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный преобразователь перемещений | 1977 |
|
SU693113A1 |
| Фазометрическое устройство | 1984 |
|
SU1221611A1 |
| Устройство контроля параметров источника сейсмических сигналов | 1985 |
|
SU1278743A1 |
| Устройство для измерения положения рабочего органа станка | 1980 |
|
SU929398A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1256209A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| Двухкоординатная система позиционирования | 1972 |
|
SU470793A1 |
| Устройство измерения перемещения | 1982 |
|
SU1334045A1 |
| Устройство для измерения перемещений в системах программного управления | 1978 |
|
SU736050A1 |
| СПОСОБ ПЕРЕДАЧИ ОПОРНОГО СИГНАЛА НА РАЗНЕСЕННЫЕ В ПРОСТРАНСТВЕ ПУНКТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2033694C1 |
