1
Изобретение относится .к области оборудоваиия для проиЗВодства изделий микроэлектроники, в частности к устройства м для .изготовления и контроля фотошаблонов.
Известны системы двухкоординатного позиционирования, содержащие блок ввода программы, подключенный .к блоку управления, соединенному с координатными исполннтельнымИ двигателями, и датчики перемещения, подключенные .к преобразователям по каждой координате.
Недостатком этих схем является то, что точность позиционирования ограничивается неконтролируемыми погрещностям-и направляюшлх.
Целью изобретения является повышение точности .работы системы поз-иц-ионирования.
Поставленная цель достигается тем, что в систему позиционирования введены по каждой координате последовательно соединенные датчик коррекции, формирователь имцульсов, реверсивный счетчик, фазовращатель и фазовый детектор. Выходы всех фазовых детекторов подключены по входам блока управления, а зыходы преобразователя каждой координаты соединены со входами фазовращателя и фазозого детектора этой же координаты. Выход датчика коррекции по каждой координате подключен к одному из ВХОДОВ формирователей импульсов другой координаты.
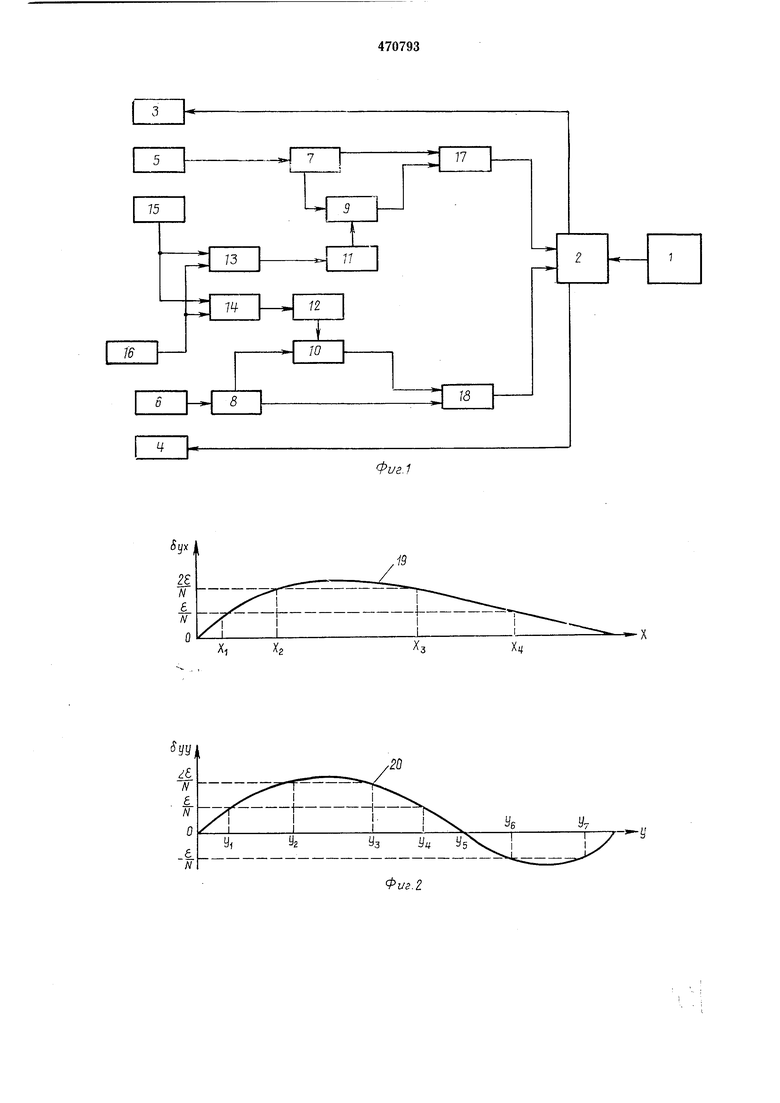
Па фит. I лредставлена структурная схема системы позиционирования; на фиг. 2 - зависимости величин погрешностей позиционирования от перемещений по координатам X и /У.
Двухкоординатная система позиционирования содержит блок ввода 1 программы, подключенный к блоку управления 2, который в свою очередь соединен с координатными исполнительными двигателями 3 и 4, датчики перемещения 5 и 6, подключенные выходами соответственно к преобразователям 7 и 8, управляемые фазовращатели 9 и 10, реверсивные счетчики 11 и 12, формирователи импульсов 13 и 14, датчики коррекции 15 и 16 и фазовые детекторы 17 и 18.
Сигналы рассогласования, поступающие из блока программы 1 или фазовых детекторов 17 и 18, преобразуются блоком управления 2 в команды торможения или движения исполнительных двигателей 3 и 4. Датчик перемещения, например датчик перемещения 5, преобразует механическое перемещение координатного стола в периодические электрические сигналы, которые известными способами преобразуются Преобразователем 7 в фазомодулированный сигнал несущей частоты, вырабатываемой генератором, входящим в состав преобразователя 7. Фазовый детектор 17 вырабатывает информацию о перемещении путем измерения фазы выходного сигнала преобразователя 7 относительно опорного сигнала, поступающего .на фазовый детектор 17 с выхода управляемого фазовращателя 9. В .качестве входного сигнала, подающегося «а сигнальный вход фазовращателя 0, используется сигнал несущей частоты преобразователя 7. На управляющий вход фазовращателя 9 поступают сигналы с индикационных выходов реверсивного счетчика 11. Изменение состояния реверсивного счетчика 11 на единицу младщего .разряда вызывает изменение фазы Аф выходного сигнала относительно фазы сигнала па входе фазовращателя 9 на величину
Л :: 2r.lN,
где /V - коэффициент пересчета счетчика 11.
Аналогично выполнены и работают датчик перемещения 6, преобразователь 8, фазовращатель 10, реверсивный счетчик 12 и фазовый детектор 18.
Принцип повышения точности работы двухкоординатной системы позиционирования заключается в следующем.
Вследствие погрещностей изготовления направляющих перемещение координатного стола вдоль оси X вызывает смещение его по оси У, причем каждому значению .координаты X соответствует определенная величина смещения Ьух ПО оси у (кривая 19 на фиг. 2). Кроме того, отработка координаты У, осуществляемая по датчику перемещения, например датчику перемещения 5, происходит с погрешностью буг, (кривая 20 на фиг. 2), которая является погрещностью датчика перемещения 5. Та.ким образом, суммарная погрещность позиционирования бу ио координате -У равна
S-V+V
Компенсация погрещности 6 осуществляется следующим образом.
Погрещности буж « квантуются по уровню Ае:
Ае г s/Л,
где е - период меры датчика перемещения 5;
N-коэффициент пересчета реверсивного счетчика 11.
По кривым 19 и 20 определяют координаты () и (xi-Xit), в которых необходимо ввести коррекцию в результаты отсчета перемещения по координате У фазовым детектором 17. При этом определяется и знак коррекции. Корректирующие сигналы вырабатываются соответствующими датчиками коррекции 16 и 15, механически или информационно связанными с координатными столами системы позиционирования. При этом датчик коррекции 15 формирует сигналы, корректирующие погрешность , а датчик коррекции 16 - сигналы, корректирующие погрешность
ук- При положении координатного стола и точках (1-ут) формируются корректирующие сигналы датчиком коррекции iO, а в точках (x.i-х,) формируются сигналы датчиков коррекции 1Ь.
Сигналы с выходов датчиков -кор.рекции io и ib постунают на входы формирователя импульсов 1.3 .и затем на входы ревер.сивного счетчика И.
С приходом каждого импульса происходит изменение состояния счетчика 11 или «-1, что вызывает изменение фазы выходного сигнала фазовращателя У на величину , а это изменение фазы, в свою
очередь, вызывает изменение результата отсчета перемещения фазовым детектором 18 на величину .
В результате погрещность позиционирования ио координате У, обусловленная погрещностями датчика перемещения 5 и погрешностями направляющих координатного стола, не превышает ±Ае.
Аналогично .осуществляется .коррекция погрешностей позиционирования .по координате Х.
Таким образом, датчик коррекции 15 вырабатывает сигналы, корректирующие погрешности датчика перемещения 5, координаты -У, и сигналы, корректирующие погрешности направляющих координаты X. Эти сигналы поступают соответственно на входы формирователей импульсов 13 и 14. Аналогично и датчик коррекции 16 вырабатывает сигналы, корректирующие погрешности датчика перемещения 6 координаты X, и сигналы, корректирующие погрещности направляющих координаты |У, которые поступают соответственно на входы формирователей импульсов 14 и 13.
Предмет изобретения
Двухкоординатная система позиционирования, содержащая блок вв.ода программы, подключенный к блоку управления, соединенному с координатными исполнительными двигателями, и датчики перемещения, подключенные к преобразователям по каждой координате, отличающаяся тем, что, с целью повышения
точности работы системы, в нее введены по каждой координате последовательно соединенные датчик коррекции, формирователь импульсов, реверсивный счетчик, фазовращатель и фазовый детектор, выходы всех фазовых детекторов подключены ко входам блока управления, а выходы преобразователя каждой координаты соединены со входами фазовращателя и фазового детектора этой же координаты, причем выход датчика коррекции по каждои координате подключен к одному из входов формирователя импульсов другой координаты.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений в системах программного управления | 1978 |
|
SU736050A1 |
| УСТРОЙСТВО для ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU394821A1 |
| Фотоэлектрический способ измерения линейных и угловых перемещений и устройство для его осуществления | 1974 |
|
SU744225A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1119044A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Устройство для измерения линейных перемещений | 1976 |
|
SU926529A1 |
| Преобразователь угловых перемещений в код | 1977 |
|
SU693410A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
N
Х
