(54) СПОСОБ ОБЕСПЕЧЕНИЯ ДРШАМИЧЕСКОЙ УСТОЙЧИВОСТИ ГЕНЕРАТОРА
2. Энергия турбины во время аварии не расходуется иа ускорение ротора генератора, а поглощается во внешнем устройстве.
Известен способ обеспечения устой™ чивости генератора с по лощью постоян но включенного на его шины асинхронизированного синхронного компенсатора. Однако устойчивость генератора в этом случае может быть полностью обеспечена лишь в ycTaHOBHBUjeMca режиме, в динамическом (аварийном) ре жиме она обеспечивается пишь при исходном фазовом угле между ЭДС статора и напряжением сети, существенно меньшим jrf/2
Известен также способ обеспечелия устойчивости генератора путем подключения кего статору активного сопротивпения. При этом достигается обеспечение динамической устойчивости в аварийных режимах, однако недостатком такого способа является то, что однократное включение активного сопрбтивпения да пеко не всегда может привести к успеху. Включение активного сопротивления эквнванеитно торможению при постоянстве М; в этом случае устойчивос;ть не может быть обеспечена, когда М. М значение М допжно превышать значение Л1.. . Когда же М неизменно, это превышение при уменьшении нагрузки генератора может стать .значнтепьным.. Соотношение М. М может поэтому приводить к излишне быстрому торможению ротора; этот эффект мол{ет усишшаться, если до отключения линии передачи ротор стал тормозиться потерь Б генераторе при аварии. С этим отрица тельным явлением можно справиться с помощ1:,ю многократного включения и отключения активного сопротивпенйя (пр отключениях сопротивления ротор ускоряется),, но это связано с усгюжиением схемы аварийного режима и вследствие резких изменений тормозного момента усложнением задачи восстановления режима передачи |,2,
Наиболее близким к настояшему изобретению является способ обеспечения динамической устойчивости генератора путем фиксации аварии в энергосистеме отключения генератора в аварийном режиме от энергосистемы и подключения на- шины генератора яогпотитеия энер гии, который опшючают по постижении углового положения и скольжения ротора генератора зааанных значений З.
Недостатком этого способа так же как и ранее описанного, является недостаточная надежность обеспечения устойJHBOCTH и усложнение задачи восстановления режима энергосистемы.
Цель изобретения - повышение надежности И упрощение обеспечения устойчивости генератора.
Эта цель достигнута в результате того, что в качестве поглотителя энергии используют асинхронный двигатель с короткозамкнутым ротором, при этом измеряют в. предаварийном режиме нагрузку генератора и параметры энергосистем и устанавливают в зависимости от измерения величин скольжение двигателя и генератора.
В доаварийном режиме в зависимости от нагрузки генератора и расчетной ава определяют величину скольжения ротора двигателя, значешш cos tp генератора и углового положения его ротора, при котором в послеаварийном режиме будет производиться отключение двигателя.
Механическая постояиная ротора двигателя должна быть существенно меньше механической постоянной ротора генератора.
При подключении двигателя его мо-Мент Mji невелик (из-за большого начального значения скольжения); уровень MQ меняется (в соответствии с нагрузкой станицр) при изменении исходного значения скольжения Sg , а также при изменении OJStp генератора, так как посяеднее приводит к изменению Е. Поэтому в начале аварии всегда M ротор генератора будет ускоряться, но еще быстрее будет ускоряться ротор двигателя, затем, когда скольжение су щесгвенно уменьшится, неравенство , MQ М изменит знак, и. ротор генератора будет тормозиться. Параметры генератора и асинхронного овигателя, а также режим генератора (costp ) и йвигатепя скольжение S в нормальном (доаварийном) режиме передачи должны быть подобраны так, чтобы подключение и отключение двигателя .обеспечивало устойчивость передачи в послеаварийном режиме.
Вращая асинхронный двигатель Б доаварийном. режиме с помощью маломощного вспомогатепьного асинхронного двух (много) скорсжтного двигателя, можно менять исходное значение скольжения иБИгатепя яо ступеням;; совмеща это с установкой требуемого значения
costp генератора, это ступенчатое упраипеиие можно сочетать с плавным изменением уровня характеристики Мд i (SQ), что и решает проблему динамической устойчивости предлагаемым способом при разных нагрузках ста1чции.
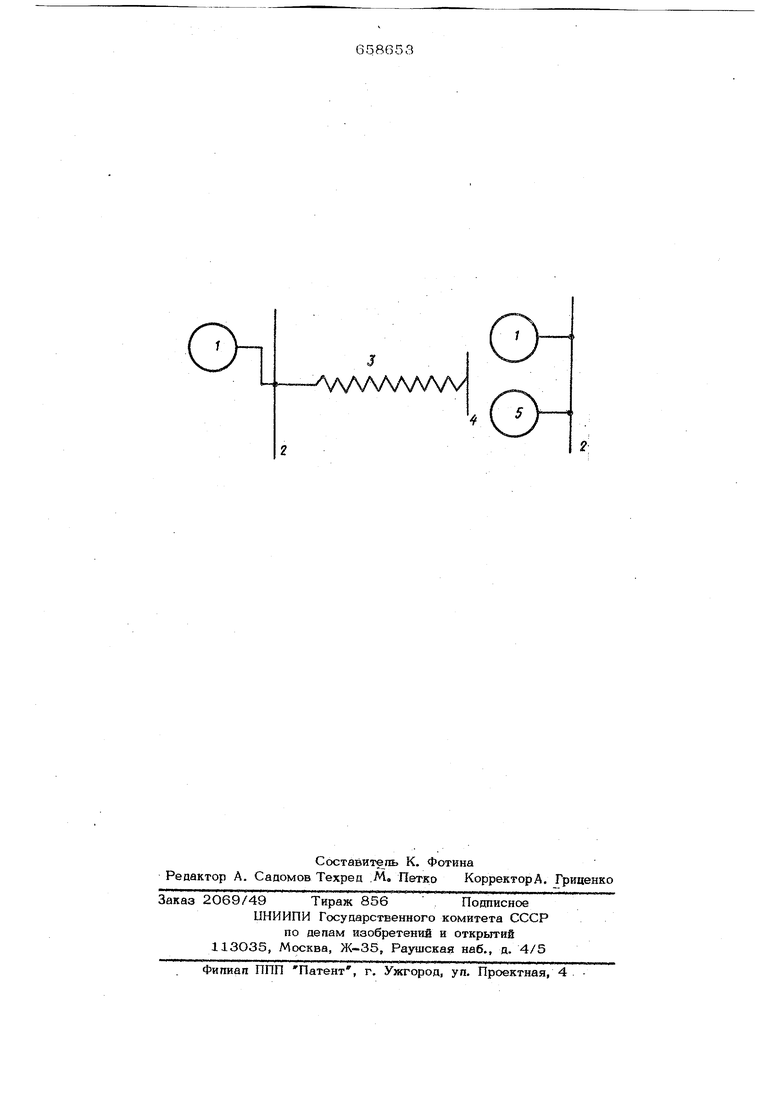
Поспеповательность операций по обеспечению динамической устойчивости генератора в аварийном режиме и восстановпение нормального режима работы передачи происходит следующим образом. Схема, ипшострирующая реапиэа- цию предпагаемого способа, приведена на чертеже, где приняты следующие обоначения:
генератор 1, шины станции 2, пиния электропередачи 3, приемная система 4, асинхронный эпектродвигатель5
Заранее определяется угповое положение ротора генератора - с помощью расчетов, учитывающих параметры исходного доаварийного и послеаварийного режимов - при котором после восстаноления передачи М Ss Мр
Также с помощью расчетов в зависимости от величины М устанавпивлется скольжение ротора двигателя и mstp генератора.
При возникновении аварии линия передачи 3 отключается от шин 2 генератор 1 и на шины включается асинхронный электродвигатель 5. Когда скопьжение генератора { S } становится несколько меньше нуля, а значение угла будет равно расчетному, двигатель отключается и одновременьпэ включается линия передачи.
Именно при этих условиях в nocvieаварийном режиме ротор генератора сначала будет тормозиться, затем ускоряться и после колебательного процесса установится равновесие моментов М и М при 5., ОВыше был расмотрен несколько идеализированный случай аварии, когда пиния передачи откточается мгновенно и энергия турбины передается лишь двигателю. В действительности отключение пинии происходит спустя некоторое время после возникновения аварии; за это время ротор генератора может как ускоряться превьпления энергии, получаемой от турбины, над энергией, расходуемой в цепи статора генератора, так и тормозиться - при обратном соотношении {в случае больших потерь). Это осложняет решение вопросов о моменте восстановления нормальной схемыпередачи, так как источнико.ч« потребления энергии во время аварии будет уже не только двигатель, что необходимо учитывать при производстве расчетом. Предельное время аварии определяется в основном временем ускорения ротора пвигателя. Если условно принять, что скольжение ротора двигателя за это время меняется на 100% при механичес-
кой псютоянной, равной 1,О с, и что в средке г за время аварии М был равен М , то время аварии равно примерно 1,0 с, что достаточно при самых тяжелых авариях, на самых протяженных
линиях.
Таким образом, технико-эг$ономическая гх|х|зективность предлагаемого способа заключается в том, что он позволяет повысить передел динамической устойчивости генератора независимо от длины лянии эпектроперааачи, связьгеающей станцию с приемной системой.
25
Формула изобретения
Способ обеспечения динамической ус-
-тойчивости генератора, путем фиксации ;аварии в энергосистеме, отключения генератора в аварийном режиме от энергосистемы и подключения на шины генератора поглотителя энергии, который отключают при достижении углового положения и скольжения ротора генератора заданных значений, отличающийся тем, что, с целью повышения надежности и упрощения обеспечения устойчивости генератора в качестве поглотителя энергии используют асинхронный двигатель с короткозамкнутым ротором, при этом измеряют в предаварийном режиме нагрузку генератора и параметры энергосистемы и устанавливают в зависимости от измеренных величин скольжение двигателя и cos ф генератора.
Источники информации, принятые во внимание при экспертизе
1. Ботвинник М. М. и Шакарян Ю. Г.
Управляемая машина переменного тока , Наука, 1969, с. 119-121.
2.Ж. Электричество , № 6, 1962, Горнштейн В. Н. и др. Применение многократного электрического торможения и разгрузки агрегатов для повышения устойчивости энергосистем.
3.Авторское свидетельство СССР № 12О584, кл. Н 02 Р 9/10, 1957.
(
лллллллл/v
vy
Gb

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СИНХРОННОЙ НАГРУЗКИ | 1992 |
|
RU2076421C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕХОДНЫМИ ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРОЦЕССАМИ В ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМАХ | 2014 |
|
RU2576652C1 |
| Устройство для автоматического управления активной мощностью турбогенератора | 1981 |
|
SU961040A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРЕДОТВРАЩЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОСТАНЦИИ | 1998 |
|
RU2160492C2 |
| Устройство для автоматического управления активной мощностью турбогенератора | 1979 |
|
SU888324A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2015 |
|
RU2592641C1 |
| Способ автоматического аварийного управления напряжением на кольцах ротора электрической машины переменного тока | 1972 |
|
SU439053A1 |
| СПОСОБ СТАБИЛИЗАЦИИ РАБОТЫ ТУРБОГЕНЕРАТОРА В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2016460C1 |
| Способ противоаварийного управления режимом параллельной работы синхронных генераторов и делительной автоматики в электрических сетях | 2018 |
|
RU2692054C1 |
| Способ электрического торможения синхронных генераторов | 2022 |
|
RU2799501C1 |