Существующие и применяемые в настоящее время способы для создания систем противоаварийного управления ЭЭС направлены на предотвращение последствий нарушения устойчивой работы ЭЭС, которые могут возникать в результате происходящих в них аварий. Решаемая данными системами задача при возникновении аварий в ЭЭС является задачей обеспечения динамической устойчивости, т.е. перехода ЭЭС от одного установившегося режима к другому без потери синхронизма (без перехода генераторов в ЭЭС в длительный или кратковременный асинхронный режим).
Данная задача решается в существующих системах противоаварийного управления (ПАУ), описание которых представлено, в частности в [1] и [2], как задача предотвращения возникновения асинхронного режима в системе с помощью подбора возможных вариантов приложения управляющих воздействий (УВ), предотвращающих такое развитие переходного процесса. Таким образом, существующие способы для синтеза ПАУ направлены на создание условий, в которых рассчитываемые и реализуемые УВ осуществляют коррекцию происходящего в ЭЭС переходного электромеханического процесса, позволяющую исключить возникновение в результате этого процесса асинхронного режима, т.е. исключить нарушение динамической устойчивости системы [2]. Применяемые в этих способах УВ являются однократными подключениями или отключениями отдельных элементов системы в ходе переходного процесса, позволяющими, в частности, осуществить торможение роторов генераторов и обеспечить таким образом сохранение динамической устойчивости системы в возникающем электромеханическом переходном процессе.
Применяемые способы противоаварийного управления не обеспечивают возможности минимизации ущерба для потребителей при решении задач противоаварийного управления в энергосистемах, поскольку выбор УВ в них не решает задачи управления переходным электромеханическим процессом в ЭЭС как задачи оптимального управления.
Техническая задача, решаемая предлагаемым изобретением, состоит в уменьшении ущерба для потребителей при возникновении аварийных возмущений в ЭЭС. Технический эффект, возникающий при решении поставленной задачи, заключается в обеспечении устойчивого динамического процесса в ЭЭС при минимальном объеме прикладываемых управляющих воздействий и достигается тем, что в известном способе управления переходными электромеханическими процессами в электроэнергетических системах путем изменения электрической мощности, вырабатываемой генераторами в электроэнергетической системе во время переходного процесса, согласно изобретению, изменение электрической мощности генераторов осуществляют с помощью введения в схему электроэнергетической системы дополнительных элементов в виде электрических сопротивлений и накопителей энергии, подключаемых через электронные коммутирующие устройства, обеспечивающие изменение во времени по заданному закону величин потребляемых и генерируемых активных мощностей в этих элементах, реализуя заданные траектории движений роторов генераторов, выбираемые из условий устойчивого динамического перехода и оптимизации переходного процесса.
В отличие от существующих систем ПАУ предлагаемый способ реализует концепцию управления аварийным режимом ЭЭС, как управления переходным электромеханическим процессом в ЭЭС, в котором движение роторов генераторов происходит по заранее заданным траекториям, обеспечивающим заданное качество данного процесса.
В соответствии с этой концепцией рассчитываемые и реализуемые в данной системе УВ, как будет показано ниже, дают возможность обеспечить заданные траектории движения роторов генераторов δ=f(t), где δ - угол ротора генератора, позволяя таким образом реализовать полную управляемость переходного процесса в системе. В первую очередь при этом выполняется условие сохранения динамической устойчивости системы, т.е. устойчивого динамического перехода от установившегося доаварийного к послеаварийному режиму.
Условия реализации движения роторов генераторов по заданным траекториям δ=f(t) могут быть получены из анализа основного уравнения движения, имеющего согласно [3] следующий вид:
где Pt и Pe соответственно мгновенная механическая мощность первичного двигателя и мгновенная электрическая мощность, отдаваемая генератором в систему.
Если предположить, что роторы генераторов двигаются по соответствующим траекториям δ=f(t), то, вычисляя заранее для каждого момента времени для соответствующего генератора вторые производные от данной функции, можно получить необходимую сумму составляющих в правой части уравнения (1).
Обозначим данную величину как P(1). Очевидно, что для того чтобы движение роторов генераторов действительно проходило по заданным траекториям, необходимо, чтобы для каждого из них в каждый момент времени выполнялось следующее равенство:

Однако реальные значения величин в правой части (1) определяются в каждый момент времени мгновенным электрическим режимом системы и одновременным действием регуляторов мощности турбин и регуляторов возбуждения. Поэтому равенство (2) не может быть в общем случае выполнено.
Для того чтобы реализовать движение роторов генераторов по заданным траекториям δ=f(t), предлагаемый способ предусматривает создание на шинах напряжения генераторов дополнительной электрической мощности P=f(t), изменяющейся во времени по закону, соответствующему условию достижения заданной траектории δ=f(t) для каждого генератора.
Введение дополнительной электрической мощности дает принципиальную возможность в каждый момент времени получить на валу генератора суммарную мощность, необходимую для реализации заданной траектории движения.
В соответствии с этим, дополнительная электрическая мощность, которая должна быть реализована в каждый момент, определяется следующим уравнением:

Значения активных мощностей генераторов Р в данном уравнении определяются как сумма измеренных в текущем времени значений активных мощностей в ветвях сети, подключенных к соответствующему генератору.
Принципиальная схема подключения исполнительных устройств к узлу генерации, позволяющая осуществлять управление электрической мощностью генератора, и реализующая предлагаемый способ управления переходным электромеханическим процессом, приведена на чертеже.
Подключение к шинам напряжения генератора исполнительных устройств, параметры которых изменяются во времени по заданному закону регулирования (на основании выполнения расчетов переходных режимов в темпе процесса) позволяет достичь нижеуказанных результатов:
- при ускорении ротора генератора в начале аварийного режима (например, при коротком замыкании в прилегающей сети) подключение активного сопротивления к выводам генератора (плавно или ступенчато изменяемого во времени) приводит к увеличению выдаваемой им электрической мощности и, следовательно, к торможению ускоряющегося движения ротора генератора и его последующему переходу в кратковременный установившийся послеаварийный режим с заданной частотой вращения (не допускаются переход генератора в асинхронный режим или срабатывание технологических защит генератора по превышению скорости вращения ротора);
- при торможении ротора генератора в начале аварийного режима (например, при отключении другого(-их) генератора(-ов) и (или) наброса нагрузки на оставшийся в работе генератор) подключение блока высоковольтных конденсаторов или накопителей электрической энергии другого типа, включенных через инверторный преобразователь, приводит к снижению выдаваемой генератором электрической мощности и, следовательно, к ускорению тормозящегося ротора генератора и его переходу в кратковременный установившийся послеаварийный режим с заданной частотой вращения.
Условия сохранения динамической устойчивости системы определяются выполнением следующих ограничений в виде равенств, накладываемых на задаваемые траектории движения:
где δ1 и δ2 соответственно угол ротора генератора в начале и в конце переходного процесса
Оптимизация переходного процесса в ЭЭС, которая может быть достигнута в данной системе, обеспечивается минимизацией следующей целевой функции:
СПИСОК ЛИТЕРАТУРЫ
1. Кощеев Л.А., Кац П.Я., Эдлин М.А., Шульгинов Н.Г., Жуков А.В., Демчук А.Т. Технологический алгоритм централизованной системы противоаварийной автоматики нового поколения. - Электрические станции 2010, №11.
2. Шульгинов Н.Г., Жуков А.В., Демчук А.Т., Кощеев Л.А., Кац П.Я., Эдлин М.А. Концепция противоаварийного автоматического управления БЭС России в современных условиях. - Энергетик 2009 №10.
3. Веников В.А. Переходные электромеханические процессы в электрических системах. Издательство ″Высшая школа″ 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| Система определения инерционной постоянной синхронной машины | 2017 |
|
RU2663826C1 |
| Система автоматического противоаварийного управления нагрузкой в изолированно работающей энергетической системе | 2020 |
|
RU2723544C1 |
| СИСТЕМА МОНИТОРИНГА ЗАПАСОВ УСТОЙЧИВОСТИ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ | 2013 |
|
RU2547224C1 |
| СПОСОБ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ РЕЖИМОМ ПАРАЛЛЕЛЬНОЙ РАБОТЫ СИНХРОННЫХ ГЕНЕРАТОРОВ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2016 |
|
RU2662728C2 |
| Способ интеллектуального управления нагрузкой в изолированных энергосистемах в аварийных режимах и устройство для его осуществления | 2022 |
|
RU2812195C1 |
| Способ автоматического определения крутизны частотной характеристики изолированно работающего энергообъединения | 2020 |
|
RU2722642C1 |
| Способ децентрализованной синхронизации и восстановления нормального режима аварийно разделенной электрической сети с генераторами | 2022 |
|
RU2784610C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ СИНХРОНИЗИРУЮЩЕЙ МОЩНОСТИ СИНХРОННОЙ МАШИНЫ | 2014 |
|
RU2564539C1 |
| Способ интеллектуального управления напряжением и реактивной мощностью энергосистемы | 2022 |
|
RU2793231C1 |
Изобретение относится к области электротехники. Техническая задача, решаемая предлагаемым изобретением, состоит в уменьшении ущерба для потребителей при возникновении аварийных возмущений в ЭЭС. Технический результат, возникающий при решении поставленной задачи, заключается в обеспечении устойчивого динамического процесса в ЭЭС при минимальном объеме прикладываемых управляющих воздействий и достигается тем, что в известном способе управления переходными электромеханическими процессами в электроэнергетических системах путем изменения электрической мощности, вырабатываемой генераторами в электроэнергетической системе во время переходного процесса, согласно изобретению изменение электрической мощности генераторов осуществляют с помощью введения в схему электроэнергетической системы дополнительных элементов в виде электрических сопротивлений и накопителей энергии, подключаемых через электронные коммутирующие устройства, обеспечивающие изменение во времени по заданному закону величин потребляемых и генерируемых активных мощностей в этих элементах, реализуя заданные траектории движений роторов генераторов, выбираемые из условий устойчивого динамического перехода и оптимизации переходного процесса. 1 ил.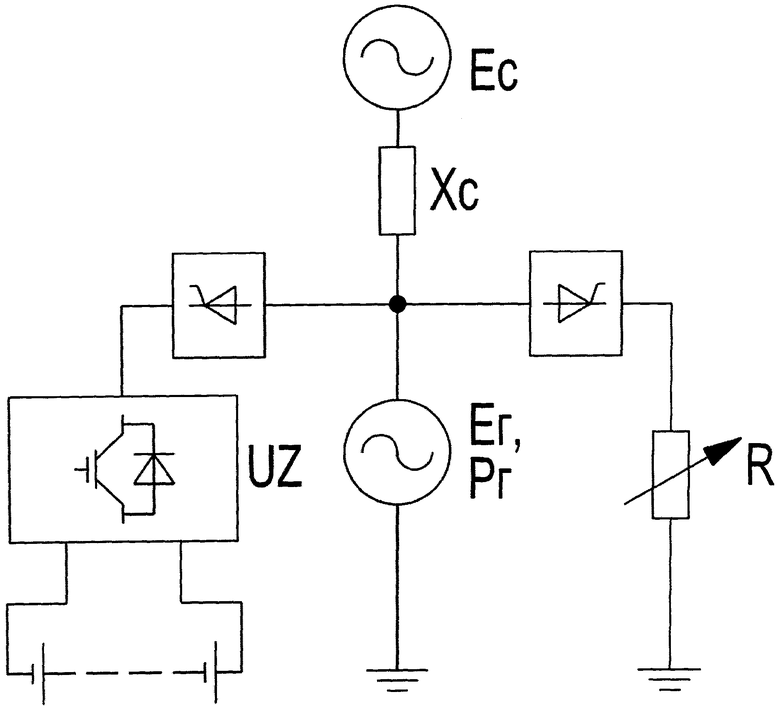
Способ управления переходными электромеханическими процессами в электроэнергетических системах путем изменения электрической мощности, вырабатываемой генераторами в электроэнергетической системе во время переходного процесса, отличающийся тем, что изменение электрической мощности генераторов осуществляют с помощью введения в схему электроэнергетической системы дополнительных элементов в виде электрических сопротивлений и накопителей энергии, подключаемых через электронные коммутирующие устройства, обеспечивающие изменение во времени по заданному закону величин потребляемых и генерируемых активных мощностей в этих элементах, реализуя заданные траектории движений роторов генераторов, выбираемых из условий устойчивого динамического перехода и оптимизации переходного процесса.
| СПОСОБ ПОВЫШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ СИНХРОННЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2005 |
|
RU2295817C2 |
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| Барабан хлопкоуборочного аппарата | 1980 |
|
SU967365A2 |

