1
Изобретение относится к области автоматического регулирования и управления возбуждения электрических машин переменного тока с двумя (или более) симметричными обмотками на роторе.
Известен способ автоматического управления напряжениями на кольцах ротора генератора переменного тока, имеющего на роторе две симметричные взаимно перпендикулярные обмотки, когда для повышения динамической устойчивости в момент аварии на обе обмотки подаются максимально возможные «форсировочные или «потолочные напряжения, при этом в доаварийном (нормальном) режиме автоматически поддерживается некоторое оптимальное, заранее рассчитанное положение обмоток ротора относительно вектора напряжения сети. Это оптимальное положение обмоток совместно € форсировкой дает в послеаварийном режиме максимальный тормозной эффект для расчетного вида аварии.
Недостатком известного способа является то, что не удается обеспечить динамической устойчивости в тех случаях, когда генератор работает в обобп енном синхронном или асинхронном (асинхронизированном) режимах, так как в этих режимах ротор генератора вращается, как правило, с отличным от нуля скольжением (), а поэтому к моменту аварии он может занимать произвольное (не
оптимальное) положение относительно вектора напряжения сети f/cС целью повышения динамической устойчивости при отличных от нуля скольжениях ротора производят смещение вектора напряжения сети на расчетный угол, определяют угловое положение ротора относительно этого смещенного вектора, фиксируют знаки синуса и косинуса полученного угла и подают напряжение форсировки в обмотки ротора, полярность которого для обмотки возбуждения Б продольной оси определяют знаком, противоположным знаку синуса угла положения ротора, а для обмотки в поперечной оси - знаком косинуса этого угла.
Расчетный угол, на который необходимо сместить вектор напряжения сети, определяется видом |расчетной аварии, характерной для рассматриваемой схемы энергосистемы.
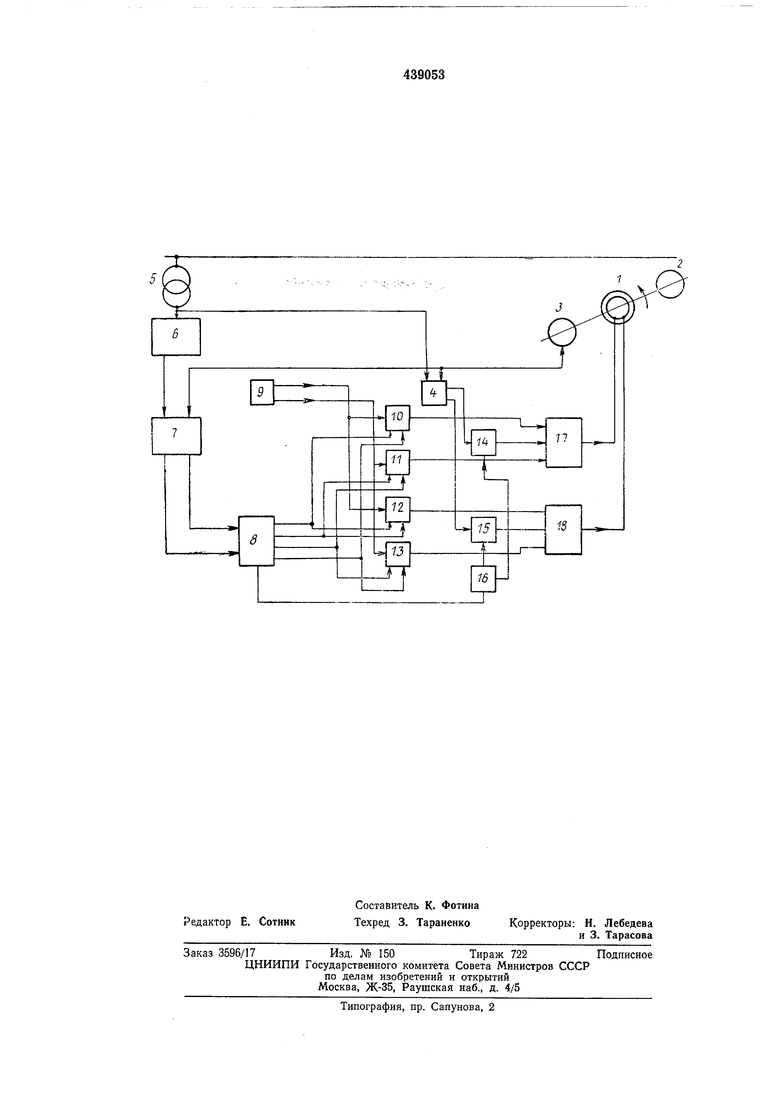
На чертеже приведена блок-схема, позволяющая реализовать способ. Она содержит машину с двумя и более симметричными обмотками на роторе 1, турбину 2, углоизмерительную ма-шину 3, регулятор 4 нормального режима, измерительный трансформатор 5, блок 6, осуществляющий смещение вектора напряжения сети, блок 7 формирования косинуса и синуса аргумента б - ij), блок 8 логики.
блок-задатчик 9 «форсировочных напряжений, реле 10-15, блок 16 фиксации аварии, блоки-усилители 17-18 мощности в осях d и q.
С помощью углоизмерительной мащины 3 получают информацию об изменении углового положения ротора относительно статора.
Регулятор 4 нормального режима управляет генератором в рабочем (доаварийном) режиме.
Измерительный трансформатор 5 дает информацию о положении вектора напряжения сети.
С помощью блока 6, представляющего собой фазорегулятор, смещают измеренное положение вектора напряжения сети С/с на расчетный угол, равный - oj).
Сигналы Синуса и косинуса угла положения ротора формируют с помощью блока 7.
Блок 8 логики формирует в зависимости от знаков, поступающих на вход величин синуса и косинуса, импульсы напряжения, а блок 9 на своих выходах - как положительные, так и отрицательные напряжения управления форсировкой.
Блоки-реле 10-13 подают на входы блоков 17, 18 форсировочные напряжения управления от блока 9, если на соответствующих выходах блока логики имеются импульсы напряжения, и не пропускают их, если импульсы напряжения на выходах блока 8 логики отсутствуют.
Блоки-реле -14, 15 служат для подачи на входы блоков 17, 18 напряжений управления в нормальном (доаварийном) режиме и отключаются (снимают управление) в аварийном режиме.
Блок 16 фиксации аварии управляет блоками 8, 14, 15, т. е. оставляет включенными блоки 14, 15 и отключенным блок 8 в нормальном режиме, или отключает блоки 14, Ii5 и включает в работу блок 8 в аварийном режиме.
Блоки 17, 18 являются обычными усилителями мощности, подающими напряжения на кольца ротора генератора как в нормальном режиме, так и в аварийном (в режиме форсиРОБКИ).
В нормальном (рабочем) режиме напряжение на выходе блока 16 фиксации аварии отсутствует, поэтому блок 8, а соответственно блоки 10-13 отключены. Включены только блоки 14, 15, которые подают на блоки 17, 18
(усилители мощности) сигналы управления нормального режима.
При нарушении нормального режима срабатывает блок 16, отключая блоки 14, 15, т. е. снимая напряжение управления нормального режима и включая в работу блок 8 логики. Последний, в зависимости от положения ротора относительно выбранной оптимальной зоны форсировки, определяемого блоком 7, выдает на одном из своих выходов импульс напряжения, заставляющий включиться одну из следующих пар блоков-реле либо 10, 12, либо 11, 12, либо 11, 13, либо, наконец, 10, 13. Блок 8 подает, таким образом, через блоки 17, 18 напряжение форсировки нужных знаков непосредственно на обмотки ротора, чем и обеспечивает положение результирующего вектора форсировки Uf в расчетной оптимальной зоне.
Предлагаемый способ аварийного управления может быть применен в любой системе, содержащей электрические мащины переменного тока с любым числом симметричных и симметрично расположенных обмоток на роторе, причем машина может работать в любом режиме (синхронном, обобщенном синхронном, обобщенном асинхронном), т. е. как со скольжением равным нулю, так и отличным от него.
Предмет изобретения
Способ автоматического аварийного управления напряжением на кольцах ротора электрической машины переменного тока с двумя (и более) симметричными обмотками на роторе путем одновременной подачи в аварийном режиме форсировочных напряжений в обе обмотки ротора, отличающийся тем, что, с целью повышения динамической устойчивости при отличных от нуля скольжениях ротора, производят смещение вектора напряжения сети на расчетный угол, определяют угловое положение ротора относительно этого смещенного вектора, фиксируют знаки синуса и косинуса полученного угла и подают напряжение форсировки в обмотки ротора, полярность которого для обмотки возбуждения в продольной оси определяют знаком, противоположБым знаку синуса угла положения ротора, а для обмотки 1возбуждения в поперечной оси - знаком косинуса этого угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления напряжениями на кольцах ротора электрической машины переменного тока | 1971 |
|
SU441637A1 |
| Способ автоматического управления возбуждением синхронного генератора с двумя обмотками на роторе в послеаварийном режиме | 1976 |
|
SU657563A1 |
| Способ автоматического аварийного управления возбуждением синхронной машины | 1975 |
|
SU573845A1 |
| Способ автоматического управления возбуждением синхронного генератора с двумя обмотками на роторе в послеаварийном режиме | 1977 |
|
SU698108A2 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СИНХРОННОЙ НАГРУЗКИ | 1992 |
|
RU2076421C1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| Способ обеспечения динамической устойчивости генератора | 1977 |
|
SU658653A1 |
| Устройство для возбуждения синхронной машины | 1986 |
|
SU1394322A1 |
| Устройство для аварийного управления активной мощностью электростанций | 1981 |
|
SU983891A1 |
| Способ повышения динамической устойчивости при параллельной работе мощных электростанций | 1975 |
|
SU558351A2 |