1
Предлагаемый преобразователь относится к области автоматики и может быть использован в системах регулирования технологическими параметрами.
Известно устройство, содержащее подпружиненный сильфон, индикаторный элемент, цанговый зажим, трехмембранное реле и аналоговый инвертор. Данное устройство обеспечивает дистанционное изменение и запоминание выходного сигнала 1.
Наиболее близким к заявленному устройству является преобразователь, содержащий корпус с сильфоном, жестко соединенным одним концом с основанием корпуса, наружная полость сильфона соединена с выходом преобразователя и проточными камерами трехмембранного реле, во внутренней полости сильфона, соединенной с атмосферой, установлена пружина, а на подвижном основании сильфона установлен индикаторный элемент, выполненный в виде шарика и сопла, соединенного гибким щлангом с входом аналогового пневмоинвертора, выход которого соединен с размыкающим контактом трехмембранного реле, сопло индикаторного элемента через вторую пружину соединено со связанным с шариком штоком, пропущенным через основание корпуса, и зажимный механизм, выполненный в виде дополнительного корпуса с цангой и зажи.ма цанги с пневмоприводом, между дополнительным корпусом и зажимным механизмом установлена третья пружина и узел ручного управления, вход пневмопривода зажима цанги соединен с командным входом преобразователя и управляющей камерой трехмембранного реле, замыкающий контакт которого соединен с каналом задания преобразователя 2.
Известные устройства имеют сложную конструкцию и значительные габариты.
Целью предложенного технического рещения является упрощение преобразователя. Поставленная цель достигается тем, что узел ручного управления выполнен в виде резьбовой гайки, подвижно связанной с зажимным механиз.мом. Дополнительным отличием является то, что зажимной механизм закреплен на торце резьбовой гайки, а также то, что зажимной механизм помещен внутри резьбовой гайки, причем между внутренней поверхностью резьбовой гайки, выполненной
в виде винтовой канавки, и зажимом цанги, на периферии которого выполнена канавка и выступ, установлены шарики, размещенные по винтовой канавке в отверстиях дополнительного корпуса.
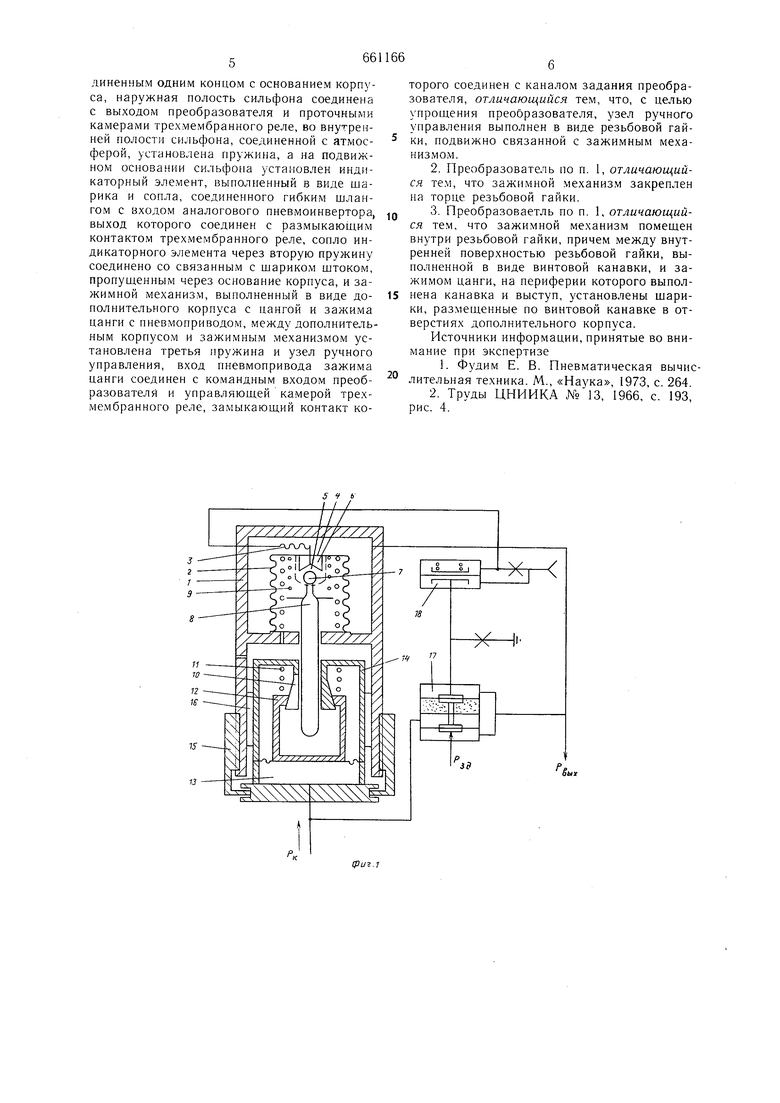
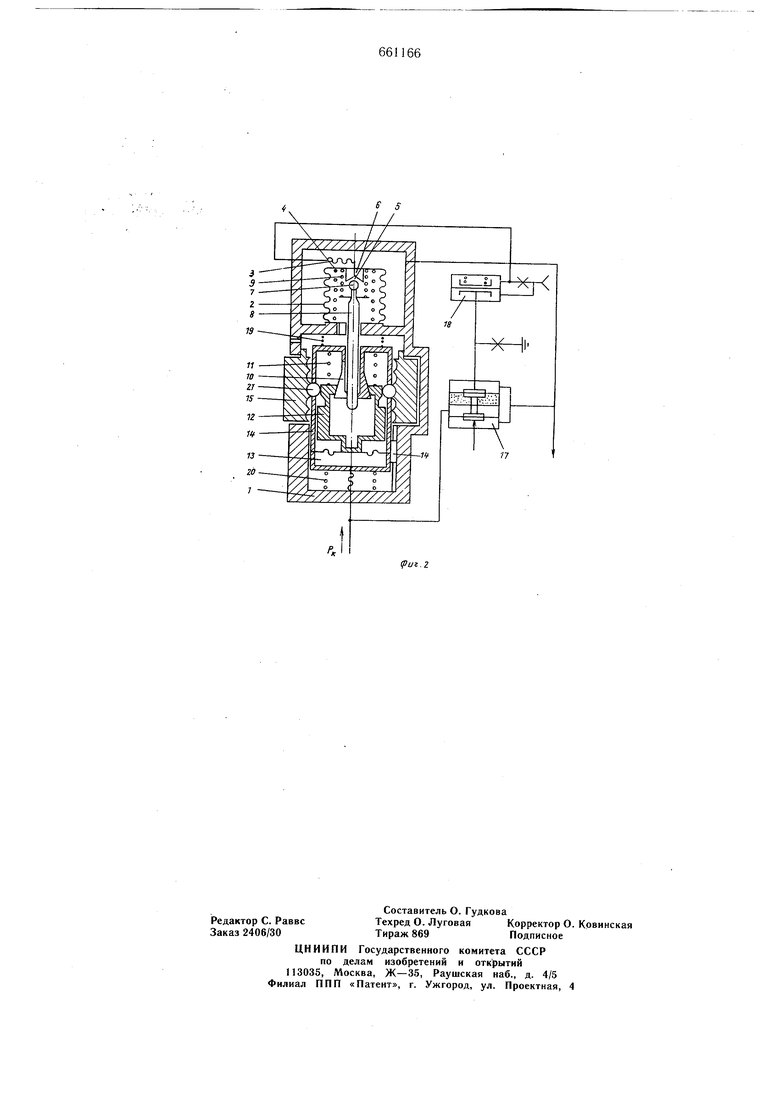
Предлагаемый пневматическ1 й преобразователь изображен на чертеже. На фиг. 1 представлен преобразователь по п. 2 формулы; на фиг. 2 - преобразователь по п. 3 формулы изобретения. Преобразователь (фиг. 1, 2) состоит из корпуса 1, сильфона 2, разделяющего полость корпуса на две полости, одна из которых - внутренняя соединена с атмосферой, а вторая - наружная - с выходным каналом 3. На подвижном основании 4 сильфона установлен индикаторный элемент 5, выполненный в виде сопла 6 с щариком 7. Шток 8 с щариком 7 индикаторного элемента является заслонкой сопла 6. Пружина 9 обеспечивает постоянное поджатие щтока 8 к соплу 6. Другой конец щтока связан с цангой 10. Фиксация штока производится с помощью пружины 11 и втулки 12, являющейся зажимом цанги. Мембранная камера 13, являющаяся пневмопроводом, пружина 11, втулка 12 и цанга 10 расположены в дополнительном корпусе 14, который подвешен в корпусе резьбовой гайки 15. Направляющие 16 удерживают дополнительный корпус 14 от поворота при вращении гайки 15.
Трехмембранное реле 17 и аналоговый пневмоинвертор 18 с большим коэффициентом усиления обеспечивают выполнение операций управления преобразователем.
Преобразователь (фиг. 2) дополнительно содержит пружины 19, 20, шарики 21,
находящиеся в отверстиях дополнительного корпуса 14 и расположенные по винтовой линии.
Пневматический преобразователь (фиг. 1) работает на принципе последовательной ко.мпенсации перемещения с промежуточным запоминанием величины перемещения.
При подаче командного давления РЙ втулка 12, сжимая пружину 11, идет вверх и освобождает цанговый зажи.м .10, растормаживая шток 8.
Под действием того же командного давления Рк пневмореле 17 пропускает запоминаемое давление РЗА вполость «а и одновременно отсекает выход с инвертора 18. Под действием давления PIA подвижное основание 4 сильфона вместе с щариком 7, соплом 6 и щтоком 8 соверщает некоторое движение, определяемое величиной поданного в полость «а давления, жесткостью сильфона и жесткостью гибкой пневмолинии 3.
После снятия командного давления Pi{ устройство переводится в режим отработки запомненного давления. При этом под действием пружины 11 и втулки 12 цанговый зажим 10 фиксирует положение щтока 8, а пневмореле 17 перекрывает давление Ргд
и одновременно соединяет выход инвертора 18 с полостью «а.
На выходе преобразователя с помощью инвертора 18, управляемого щариковым соплом, отрабатывается давление выхода, равное Рэд. В режиме отработки запомненного давления подвижное основание 4 сильфона автоматически отслеживает положение щтока 6. Если подвижное основание не дошло
Q до штока, то давление в линии сопла падает, а на выходе инвертора 18 возрастает, давление в полости «а тоже возрастает, обеспечивая движение подвижного основания 4 сильфона к шгоку 8. Положение подвижного основания сильфона однозначно за5 висит от величины давления в полости «а, в режиме отработки запомненного давления подвижное основание сильфона автоматически удерживается в положении, определяемом давлением Рзд в момент фиксации
щтока 8. Следовательно Рвых всегда равно
0 р hsA.
Предлагаемый преобразователь имеет возможность ручного перемещения щтока 8, тем самым, изменяя в ту или другую сторону величину давления Рвых- Для этого оператор вращает гайку 15 влево или вправо, тем самым перемещая дополнительный корпус 14 по направляющим 16, а вместе с ним и шток 8, изменяя таким образом величину давления Рвьи . По окончании отработки 0 запомненного сигнала оператор возвращает гайку в исходное среднее положение. В случае необходимости на гайке могут быть нанесены деления.
На преобразователе (фиг. 2) возможно ручное перемещение щтока 8, и, тем самым, изменение в ту или другую сторону величины давления Ршх. Для этого оператор вращает гайку 15. Шарики 21, скользя по винтовой канавке гайки 15, получают осевое перемещение, вместе с ними на направляющих 16 перемещаются в осевом направлении дополнительный корпус с зафиксированным в нем щтоком 8, изменяя те.м самым величину выходного давления РвыхПри подаче командного давления Рк дополнительный корпус пружинами 19 и 20 5 устанавливается в исходное положение, причем колебания его гасятся быстро, так как он, совместно с основным корпусом, представляет собой как бы демпфер, и преобразователь готов к «запоминанию информации.
Время хранения информации зависит от того, как долго пружина 11 может удержать втулку 12 в положении фиксации щтока и дополнительного корпуса.,
Формула изобретения
. Пневматический преобразователь, содержащий корпус с сильфоном, жестко соелинейным одним концом с основанием корпуса, наружная полость сильфона соединена с выходом преобразователя и проточными камерами трехмембранного реле, во внутренней полости сильфона, соединенной с атмосферой, установлена пружина, а на подвижном основании сильфона установлен индикаторный элемент, выполненный в виде шарика и сопла, соединенного гибким шлангом с входом аналогового пневмоинвертора, выход которого соединен с размыкающим контактом трехмембранного реле, сопло индикаторного элемента через вторую пружину соединено со связанным с шариком штоком, пропущенным через основание корпуса, и зажимной механизм, выполненный в виде дополнительного корпуса с цангой и зажима цанги с пневмоприводом, между дополнительным корпусом и зажимным механизмом установлена третья пружина и узел ручного управления, вход пневмопривода зажима цанги соединен с командным входом преобразователя и управляющей камерой трехмембранного реле, замыкающий контакт которого соединен с каналом задания преобразователя, отличающийся тем, что, с целью упрощения преобразователя, узел ручного управления выполнен в виде резьбовой гайки, подвижно связанной с зажимным механизмом. 2.Преобразователь по п. 1, отличающийся тем, что зажимной механизм закреплен на торце резьбовой гайки. 3.Преобразоваетль по п. 1, отличающийся тем, что зажимной механизм помещен внутри резьбовой гайки, причем между внутренней поверхностью резьбовой гайки, выполненной в виде винтовой канавки, и зажимом цанги, на периферии которого выполнена канавка и выступ, установлены шарики, размещенные по винтовой канавке в отверстиях дополнительного корпуса. Источники информации, принятые во внимание при экспертизе 1. Фудим Е. В. Пневматическая вычислительная техника. М., «Наука, 1973, с. 264. 2. Труды ЦНИИКА № 13, 1966, с. 193, рис. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический преобразователь | 1977 |
|
SU693058A1 |
| ПНЕВМАТИЧЕСКИЙ БЛОК ПАМЯТИ | 1967 |
|
SU201783A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЗАДАТЧИК | 1967 |
|
SU201792A1 |
| Пневматический блок памяти | 1976 |
|
SU643896A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ В ПЕРЕМЕЩЕНИЕ | 1972 |
|
SU351230A1 |
| Устройство для регулирования давления воздуха в шинах транспортного средства | 1988 |
|
SU1692870A1 |
| ПНЕВМАТИЧЕСКОЕ АНАЛОГОВОЕ УСТРОЙСТВО ПАМЯТИ | 1969 |
|
SU254893A1 |
| Регулятор давления | 1977 |
|
SU744492A1 |
| Цанговый патрон | 1984 |
|
SU1184614A1 |
| Пневматический измерительный преобразователь теплотехнического параметра | 1973 |
|
SU508123A1 |
фиг.1
