I
Изобретение относится к приборам для измерения вариаций сипы тяжести Земли.
Известный гравиметр Аскания Q5 - 11 1 J, предназначенный для этой йели, содержит пружинные весы, представляющие собой рычаг с грузом, удерживаемый в горизонтальном положении двумя главными горизонтальными пружинами. Изменения сит,: тяжести компенсируются и измеряются с помощью измерительного блока, включающего в себя измерительную пружину, жестко связанную с рычагом весов, угфавпяющий элемент и микрометрическое устройство.
Диапазош ый блок прибора содержит диапазонную пружину, жестко связанную с рычагом весов, и управляющий элемет-. Индикатор малых перемещений рычага выполнен фотоэлектрическим. Гравиметр rejvметнзирован, имеет двухступенчатый электрический термостат. Минимальная фиксируемая величина приращения силы
тяжести - отсчетная единица - составляет .
Весы гравиметра Норгарда 2 представляют собой кварцевую систему, состоящую из рычага с грузЬм, подвешенного на горизонтальных крутильных нитях.
Процесс измерения заключается в идентификации определенного угла закручивания нитей подвеса рычага методом наклона прибора. Углы наклона являются мерой изменения сипы тяжести. Диапазонньгй блок прибора содержит управляющий элемент, изменяющий угол закручивания нитей подвеса. Индикатор малых перемещений рычага выполнен на базе автоколлимационной системы. Отсчетная единица Ю гл.
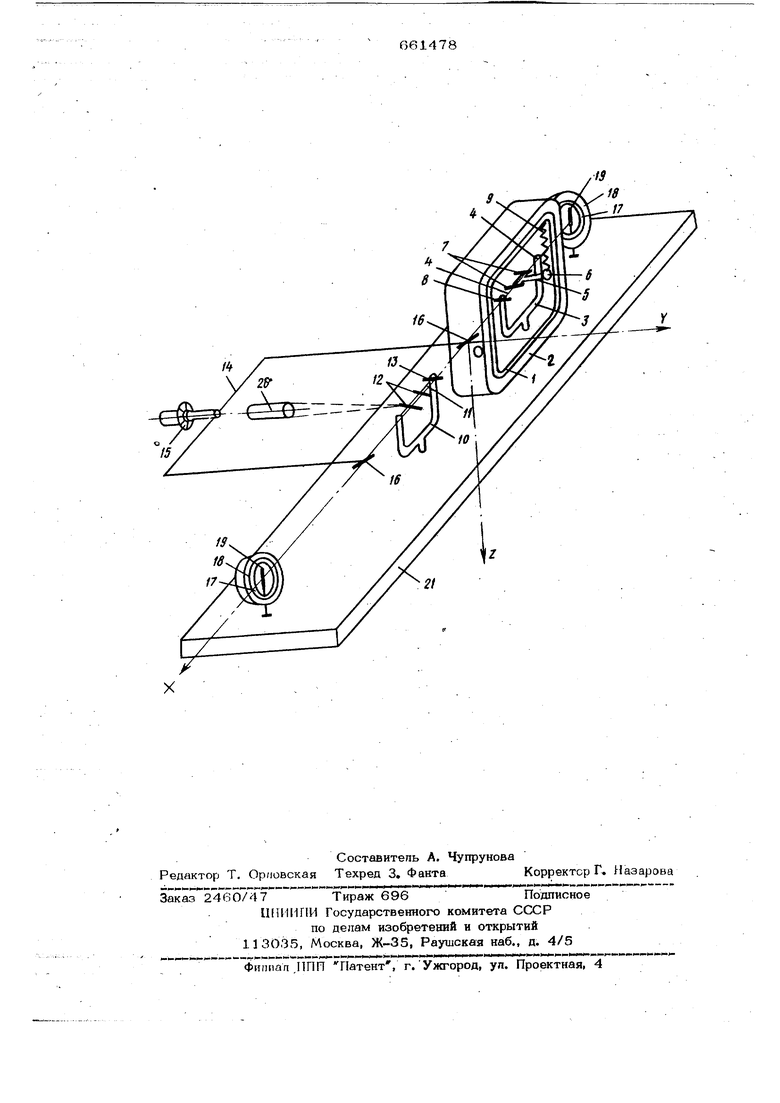
Известен стационарный грайиметр, содержащий крутильные весы с рычагом и грузом, измерительный блок с управляющим элементом и микрометрическим устройством, диапазонный блок с диапазонной пружиной, жестко связанной с рыча3 6614 гом весов, индикатор малых перемеше. Общнм нейостаттсбм описанных приборов является зкачнтепьнай зависимость показаний от температуры окружающей S среды.: что снижает точность измеренийЦель изобретения - увепичёние -Гоч ности измерений. Указанная пепь достигается тем, что в стационарном гравиметре весы выпоп.не- в ны в виде крутильной кварцевой системы с горизонтальными нитями подвеса, на котоpbix, помимо рычага с грузогл, подвешена ткже главная астатическая магнитная евстем.а, жестко связанная с рычагом. Маг- ниты астатической системы перпендикуляр-, ны нитям подвеса, Помимр этого, в приборе дополнйтель- но установлен преобразователь, представЛЯЙ.ЩИЙ собой крутильную кварцевую сиетему с горизонтальными нитями подвеса, на которых подвешена астатическая мигнитная система преобразователя с маг-. , нитамй. жестко связантшми между собой н перпендикулярньп - нитям подвеса. причем нити подвеса обеих астатических систем расположены на одной прямой лиНИИ, а ближайшие магниты двух астатических систем имеют одинаковую полярность. В поле действия астатических магнитньтх систем установлены горизонтальные ниты чувствительности, укрепленные неподвижно и перпендикулярно нитям подвеса таким образом, что ближайщяе к магнитам чувствительности магниты астатических систем имеют одинаковую с ними полярность. Измерительный блок, кроме управяяюшего элемента и микрометрического устройства, содержит два идентичных коллинеарных измерителы ых магнита одинаковой полярности, размещеннь1Х симмет- рйчно относительно астатической магнитной системы преобразователя и механически связанных с управляющим элементом. . Диапазонный блок, помимо диапазонной пружины, жестко связанной с радчагом, содержит два идентичных вертикальных аиапазоннь магнита одинаковой полярноетн, размещенных симметрично относительID tl.nOlJ V IIJTIJViC 1 К В . ««х, WIl « ъ «.«.« НО астатической магнитной системь преибразоватепяНа чертеже показан предложенный гравнметр. Гравиметр содержит главную капсулу 1, окруженную теплоизоляционной рубашкой 2, в которой размещены крутнльные писы, имеющие кварцевую раму 3, нити 78 4 подвеса и рычаг 5 с грузом 6, а так главная астатическая магнитная система с магнитами 7, магнитом чувствитепьност 8 и диапазонная пружина 9. Преобразователь гравиметра выполнен в- виде крутильной системы с кварцевой рамой 10, нитями 11 подвеса, астатической магнитной системой с магнитами 12, магнитом чувствительности 13. Измерительный блок содержит управляющий элемент 14, микрометрическое устройство 15 и измерительные магниты 16. Диапазонный блок, помимо пружины 9, включает в себя капсулы 17, покрытые теплоизоляционными рубашками 18, с °диапазонными магнитами 19. С астатиче- ской магнитной системой 12 преобразователя оптически связан индикатор 20 малых перемещений. Центры всех используемых в приборе магнитов расположены на одной линии, совпадающей с нитями подвеса обеих астатически;х систем, а все узлы прибора, содержащие магниты, жестко укреплены на оц кварцевой 2i. Условие равновесия для крутильньк ве преобразователя для малых углов сЛ , /5 и )0 , без учета размеров маг следующее: тлР АА кд А g iii WiAiЛ-Mц2MlA2 - М М А о, (сС + И) -Р - М б М i АЛ - . . И 1 5 CiOCi 0v (1) ДА м А л IA Ml Z ь1 2 т +МЛЛАГ /ь) А )( Здесь .i) ) д (2 5) (a } . . . i Ги I ) . . шиш , шимии и i « (2 7) . i ()°(V42) / а, i 1 - , . j-Г Г Тэ . , ) (Э
(М.()
I
i
А .
ч| ()
| ( 6 - ускорение си/ы тяжести; m - масс рычага 5 с грузом 6; Е - расстояние по перпендикуляру от крутильной нити 4 до центра тяжести рычага с грузом; М , М21Мц,Мц,,Мд ,Мц - магнитны моменты соответственно подвесных магни тов 7 и 12, магнитов чувствительности 8 и 13, диапазонных магнитов 19, измеритель11ых магнитов 16; оО - угол поворота рь4 чага с грузом и подвесных магнитов 7 от горизонтальной плоскости ХОУ вокруг оси X против часовой стрелки; (Ь угол поворота подвесных магнитов 12 от горизонтальной плоскости ХОУ вокруг оси X по часовой стрелке; У - угол поворота измерительных магнитов 16 от горизон- тальной ппоскости ХОУ вокруг оси У; Рмомент вращения, создаваемый диапазонной пружиной 9; С I коэффициенты кручения нитей 4, 11. Совместное решение уравнений (l) и (з) при условии, если С численно равно Мц J Ml-Al+M42M.iA2+ , приводит к соотношениям: ( Q, ЛI ......I.... II., ii -iiit --.ИИ...-..- ft . .с -МщМ А -МцзМ А . т|е-Р-М М А4-МмМ1АзУ откуда можно сделать следующие выводы: 1. Углы с6 и /5 находятся в линейной зависимости от 6 , следовательно, выходной величиной может служить любой из этих углов. Однако более целесообразно взять угол 5 , который в отличие от об не зависит от параметра С Кроме тото, при наблюдении способом нулевого отсчета, когда /г О, угол od также равен нулю. Реализация подобной зависимости возможна только при отсутствии влияния измерительщлх и диапазонных магнитов на преобразователь, о достигается их
е 1.4 7 8,б
симмотричгплм распопожяниеМ относитрп :,тю подвас;ных магнитов преобразоватепя.
2.Подбором постоянных параметров обеих крутильных систем можно регупиро$ вать коэффициент преобразования k-об//53.Угпы Л , jb и у необходимо удерживать в онредепенных границах, так как уравнения (l) и (2) справедпивы пишь для малых углов, гарантирующих тре0 буемую линейную зависимость входных и ВЫХОДНЫХ величин.
В частном случае, когда ,
М,, М,.-.М.1 . А.А.
, и CJ-GI .fA{ т е-Р-М МА4.-МфМА5У Ь С1-МцЛ() увствительность по углу поворота астаической магнитной системы преобразователя. 15глЕ rTig 5д () Чувствительность по утпу поворота изме- ительнь1Х магнитов d)f mC AWj MAsig г Re 6 (Ь - минимальный фиксируемый угол поворота преобразователя; -предельно допустимое значение угла у ; диапазон измеряемых значений силы тяжести; dJA - отсчетная единица. Диапазонная пружина 9 служит для фиксированной компенсации большей части силы тяжести g, 978 гл, диапазонные магниты 19 - для грубой, так называемой широтной,компенсации в пределах Дб «5 гл, причем магниты 19 перемешают вместе с капсулами вдоль оси X симметрично относительно астатической магнитной системы преобразоватепя или врашают в ве кгикальной плоскости; Х02. Величины магнитных м ом актов Myj и Мд определяются выражониями: те те - Наблюдения силы тяжести производят на тационарной точке способом нулевого 76 отсчета по угпу fb с помощью микрометри ческого устройства 15 путем вращения Ичзмеритепьных магнитов 16 до совмеще ния проекции подвижного индекса, укрепленного на одном из магнитов 12, с купевым деп9нием щкапь индикатора 20 ма пых перемещений. Возможна автоматическая регистрация данных в р«яснме компенсации с помощью цепи обратной связи; иупь-йндикатор-управпяющий элемент измерительных магтгатов., Пример конкретного вьшопнения: cмsЧ2 6° . 5см 9 см|Чз 18 см| А - - -.--i А7 875.10 см Э$ А2 А(, . :Э„,.,,-Э. Ад 0.2. смЗ. А4 7.6.10 , АЗ- 7,7ДО®см ; , 1 сгсм; Mj 0,026 crcMj Мд 1,32 сгсм, масса каждого из подвесных магни то0 ГПм .тд, 14.10 г, мас са рычага d грузом m и 2.10 г, длина рычага Е « 1 см, диаметр крутильных ни тей d 28 мкм, С « 0,88 ГСМ сёк, минимальный фиксируемый угол поворота преобразователяс /Ь 2 уга, 05,10-Эгл, Д 5 гл, у Г,р „ 5.1О рад,6|г 53 10 рад/гл, от10 гл. счетная единица Зд Таким образом, по сравнению с прототипом 3J точность измерений повышается на один порядок. Зависимость показаний of температурных изменений характеризуется температурным коэффициентом прибора Мл cdp/dt Так как параметр С , М , Р, Мл в условиях изолированной капсулы можно, считать постоянными для поставленной задачи, то, полагая ct; О, /5 0, паяодимMg S & Зaдg.,t( J где а - коэффициент линейного расширения плавлёййго лварда, из которого йз. готовлена несущая платформа; /ц - температурный коэффициент магнита, одинако 1бый для всех магнитов прибора. Для рас смотренного примера а О,4.10 град (после. специальной термической обработки магнитов), Мд 6.1О + ,1О э pafi/град, т.е. нестабильность Г)аомётрического параметра Л оказывает значительно большее влияние, нежели нестабильность параметоов АС и Мц . Отсюда можно оценить пр& дельно. допустимое изменение температуры At up ОД7 С. Следовательно, существует необходимость термостетирования прибо ра. 8 Для уменьшения влияния переменных и постояншлх магнитных полей точку набгаодеиия выбирают вдали от источников ромышленных помех в однородном геоагнитном поле. Ось X прибора ориентиуют горизонтально в плоскости магнитного меридиана. Рассмотрим вггаяние компонент магнитного ПОЛЯ Земли, 1.Колшонанта Ни О, 2..Компонента Н оказывает практически заметное индукционное влияние только на измерительные магниты М, . Предельно допустимая величина вариаций йНх„р ± 10,437 + 0,4 э, если индукционный коэффициент 5 « 5.10 э. 3. Компонента Z оказывает практиче-:ски заметное индукционное влияние только на вертикальные диапазонные магниты Мб с По аналогии с компонентой HX ,ес 5 гл, U 2 Следовательно, в этом случае необходимо учитьюать вариации а Z с помояцью магнитного - вариометра. Величина Д2 рп может быть увеличена за счет уменьшения ёоглак предусмотреть изготовлени§ типовых взаимозаменяемых главных капсул с чувствительной системой , настроенной на различный уровень компенсации 6 с помощью диапазонной пружины. В случае нестатичности д М , главной магнитной системы на нее воздействует момент вращения Д Л | Z . Согласно соотJ,A компоненту Z дМ, ношению необходимо учитывать с точностью + 2 у , если относительная погрешность изготовления подвесного магнита М составляет . Что касается подвесных магнитов преобразователя, то при их неидентичности Д /И 2 угол Л отличается от нуля при, t Р о и равен сб Это привоМ М Аддит К линейной {зависимости температурного коэффициента прибора от параметра % : 2ЛМ2 /ид4.Л/Ъд (А :м лл2Аз) Если компонента 2 скомпенсирована в объеме преобразователя с точностью + 100 g , что не представляет техничео66::кой проблемы, а относительная погреш преть изготовпения магнитов М2 равна Ю, то Д д - i 2,2. град-i , г.е. температурный коэффициент прибора язменяется всего ппишь на 3,7%. Все детали прибора, за искточением иагнитов, изготавпнвают из немагнитных иатериапов. Повышение точности наблюденнй лунносолнечных вариаций силы тяжести, обеспечиваемое данным гравиметром, даст существенньтй экономический эффект при проHcjBogcTBe высокоточных гравиметрических зьемок с целью поисков нефти, газа и руд ных Месторождений. Значительный практический интерес представляет также изучение вековых изменений силы тяжести и прогнозирование сейсмоактивной деятельности. изобретения Ф о р м у-п а Стационарный гравиметр, содержащий крутильные весы с рычагом и грузом, измерительный блок с управляющим элементом и . микрометрическим- устройством, ди апазонный блок с диапазонной пружиной, жестко связанной с рычагом весов, индикатор малых перемещений, отличаю щийся тем, что, с целью увеличения точности измерений, в нем дополнительно устаноЁлен .преобразователь, выполненный в форме крутильной кварцевой системы с горизонтальными нитями подвеса, на которых подвещена астатическая магнитная система с магнитами жестко связанными между собой и перпендикулярными.нитями подвеса, а в крутильные весы дополнител 8 но введена жестко связанная с рычагом главная астатическая магнитная система, магниты которой перпендикулярны нитям подвеса, нити подвеса обеих астатических систем расположены нй одной прямой цинии, бпижайщие магниты двух астатических систем имеют одинакову1рполя{эно6тъ, в поле действия астатических магнитных систем установлены горизонтальные магниты чувствительности, укрепленные неподвижно и перпевдикулярно нитям подвеса таким образом, что ближайшие к магнитам чувствительности магйигы астйтическтос систем имеют одинаковую с ними пол5фность; измерительный блок дополйительно содержит два идентичных коллинеарных измерительных магнита одинаковой поп$фности, размещенных симметрично относительно астатической магнитной сист&мы преобразователя и механически св,язанньгх с управляющимэлементом измеритель-ного магнита; в диапазонный блок дополнительно введены два идентичных вертикальных диапазонных магнита одинаковой полярности, размещенных симметрично относительно астатической магнитной системы преобразователя. Источники информации, принятые во внимание при экспертизе 1.Веселов К. Е,, Сагитов М. У. Гравик{Ьтрическая разведка. /Ч, Недра, 1968, с. 150-153. 2.Веселов К. Е., Сагитов М. У. Гравиметрическая разведка. М., Недра, 1968, с. 144-149. 3. Весепов К. Е. Кварцевые астазированные гравиметры. М., Гостоптехиздат, 1961, с. 123-126.

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИМЕТР | 2008 |
|
RU2370794C1 |
| Гравиметр для измерения ускорения силы тяжести | 1978 |
|
SU775703A1 |
| СКВАЖИННЫЙ ГРАВИМЕТР | 1966 |
|
SU179486A1 |
| Гравиметр | 1982 |
|
SU1080103A1 |
| Гравиметр | 1979 |
|
SU1099302A1 |
| Крутильный сейсмограф | 1987 |
|
SU1453347A1 |
| СПОСОБ ОТЛАДКИ ГРАДИЕНТОМЕТРА | 1964 |
|
SU165909A1 |
| ГРАВИМЕТР | 2007 |
|
RU2345387C1 |
| Гравиметр | 1976 |
|
SU763831A1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |