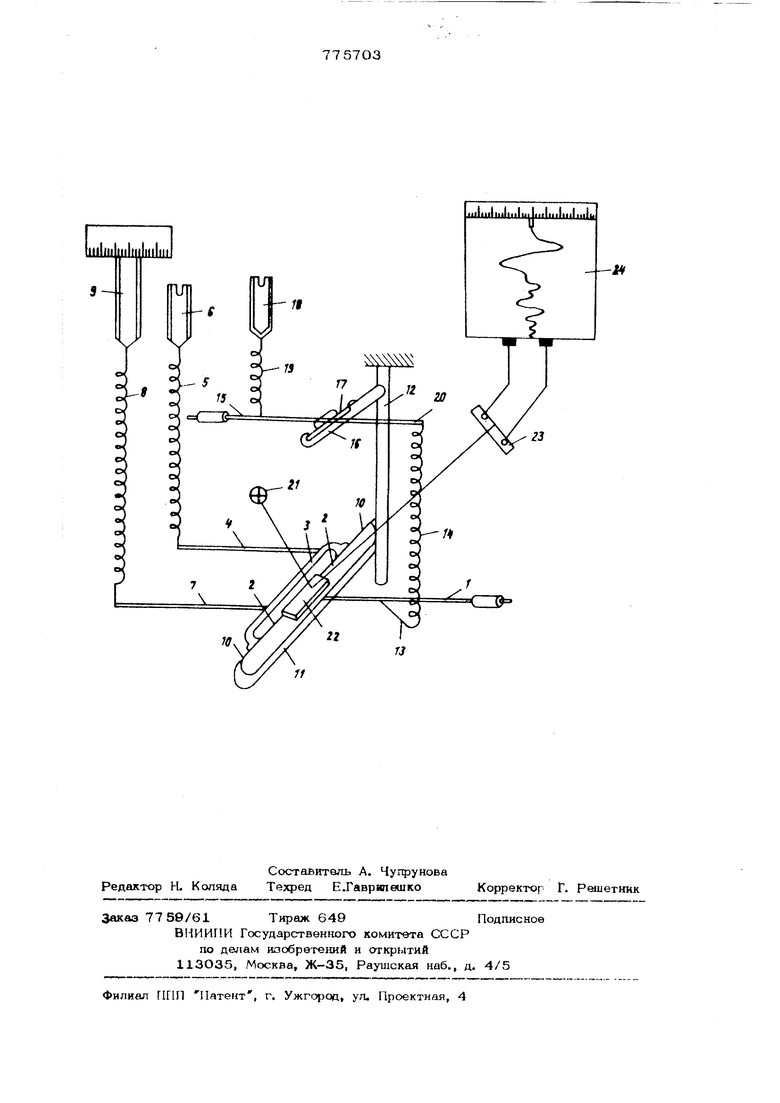
Изобретение относится к области гео физики, в частности, к устройствам для измерения ускорения силы тяжести на подвижном основании. Известны гравиметры для измерения ускорения силы тяжести на подвижном основании, содержащие чувствительный элемент, выполненный в виде горизонтал ного маятника, подвешенного на горизон тальных упругих, нитях, термостат, фотоэлектрический преобразователь, регистратор. Для умоны11е1шя влияния инерциальных ускорений на маятник его размещают в демпфирующей жидкости Наличие сильного демпфирования чув ствительного элемента приводит к увеличению времени переходного процесса прибора и к значительному искажению амплитудно-фазовой характеристики сигнала. Кроме того, эти гравиметры харак тернзуются большим смещением нульпункта, достигающим 2-3 мгл. в сутки. 11еречислеин.ые факторы приводят к умеяь щению точности 1)змо}к ния. Известны также гравиметры, содержащие металлический чувствительный элемент, выполненный в виде горизонтального маятника, подвешенного на горизон тальном упругом подвесе, измерительную и главную пружины, электромагнитный демпфер, фотоэлектрический преобразователь, термостат, регистратор 21. При высокой аппаратурной точности этим приборам также присуши амплитудно-фазовые искажения сигнала. Наиболее близким техническим решением к предложенному является кварцевый гравиметр, содержащий горизонтальный маятник на упругих нитях, помещенный в демпфирующую жидкость, главную н измерительные пружины, фотоэлектрический преобразователь, термостат, уоТойство обратной сватэи, регистратор 3, 4. Благодаря обратной связи в приборе уменьщены систематические погрешности, обусловленные влиянис м горизонтальных и вертикальных ускорений. Оцнако в этом гравиметре, как и в вышеупомянутьк, наблюдаются больше амплитудно-фазовые искажения сигнала. Кроме того, нуль-пункт этих приборов, как правило, не менее 2 мгл в сутки. Целью изобретения является повышение точности измерения за счет уме)аьшения дрейфа нульпункта гравиметра, ампли тудно-фазовых искажений сигнала и 1ЕШИяния вертикальных инерциальных ускорений. Поставленная цель достигается тем, что в чувствительную систему введе1:1ы юстировочный винт с упругой пружиной и дополнительная упругая система, состоящая из горизонтально расположенного маятника, подвешенного в монтажной рам ке, соединенной с основанием системы на горизонтальных упругих 1штях и свя;зан- ного с Еостировочным винтом пбсредсггвом упругой пружины винта, при этом чу1эстви тельная кварцевая система и дополнитель ная упругая система связаны между собо главной пружиной так, что один конец пружигй. жестко закреплен на рычаге кварцевой системы с той же стороны относительно нитей подвеса, с которой нах дится центр масс маятника этой системы а второй конец закреплен на рычаге дополнительной системы, который является продолжением маятника дополнительной системы и расположен относительно ните подвеса с противоположной центру масс маятника стороны. Предлагаемый гравиметр показан на чертеже. Он содержит маятник 1 чувствительной системы, нити 2, подвеса маятника чувствительной системы, измерительную рамку 3 чувстительной системы, рычаг 4 диапазонной пружины, диапазонную пружину 5, диапазонный винт 6, рычаг 7 из мерительной пружины, измерительную пр жину 8, микрометренный винт 9 отсчет ного устройства гравиметра, нити подвеса 10 измерительной рамки, монтежкую рамку 11 чувствительной системы, сснование 12 системы, рычаг 13 главно пружины, соединенный с маятником чувствительной системы, главную пружину 14, маятник 15 дополнительной системы монтажную рамку 16 дополнительной системы, нити 17 подвеса маятника допол1штельной системы, юстировочный винт 18, юстировочную пружину 19, рычаг 2О главной пружины, связанньлй с маятником дополнительной системы:, осветитель 21, зеркало 22 маятника чу ствительной системы, фотоприемник 23, егистратор 24. Гравиметр работает следующим образом. Световой поток лампы осветителя 21, отражаясь от зеркала 22, падает на фотоприемник 23. В цепь фотоприемника включен регистратор 24. При горизонтальном положении маятника 1 световой поток расположен на составляющих фотоприемника симметрично относительно линии раздела, в цепи фотоприемника электрический ток равен нулю и регистратор запишет прямую линию. При отклонении маятника от горизонтального положения в цепи фотоприемника появится ток соответстующего знака и величины, что и будет зафикс1фовано на регистраторе. Как видно из чертежа, чувствительная и дополнительная системы работают навстречу друг другу, поэтому при изменении ускорения силы тяжести гравиметр будет регистрировать разностной эффект этого изменения. Исходя из этого положения, при изготовлении системы гравиметра необходимо задать больидую угловую чувствительность основной (чувствительной) системе и малую угловую чувствительность дополнительной системе к измерению ускорения силы тяжести с тем, чтобы разностной эффект изменения ускорения силы тяжести оставался значительным. Как известно дрейф нульпункта гравиметра зависит от величины деформации упругих элементов - чем больше деформация, тем больше дрейф нульпункта. Поэтому при изготовлении системы гравиметра необходимо задать малую деформацию упругим элементам основной системы (главной пружине) большую деформацию упругим элементам дополнительной системы (ее нитям подвеса) с таким расчетом, чтобы разностный дрейф нульпункта системы гравиметра был близким к нулю. Несмотря на то, что разностный дрейф нульпункта cHCTe vtti гравиметра близким к нулю, каждая из систем (основная и дополнительная) будут иметь свой дрейф нульпункта. Дрейф нульпункта основной системы будет постоянно компенсироваться дрейфом нульпункта дополнительной системъ. При этом маятник основной системы будет все время находиться в горизонтальном положении (при неизменном ускорении силы тяжести), в маятник дополнительной системы будмт постепенно отклоняться вниз, fioyroviv 57 со временем маятник дополнительной системы отклонится от положения минимума чувствительности к наклону. При помощи пружины 19 и винта 18 маятни доиолнительной системы приводится в го ризонтальное положение, а рассогласова ние при этом системы гравиметра устра няется при помощи пружин 5, 8 и винто 6, 9. Если дрейф нульпункта системы грави метра положительный (маятник основной системы отклоняется вниз), необходимо увеличить угол закручивания нитей 17. Подбирая угол закручивания нитей 17, можно полностью исключить дрейф нульпункта гравиметра. Под действием 1шерциальных ускорений оба маятника будут совершать синхронные колебания. СЬнако наличие упругой пружинной связи между ними будет приводить к ослаблению амплитуд их отклонения. Подбирая моменты инерции маятников 1 и 15 и моменты, создаваемы главной пружиной 14, можно добиться такого положения, что для основного периода (например б) возмущающих вертикальных инерциальных ускорений их влияние на систему гравиметра будет близким к нулю. Для других периодов во змущающих ускорений их влияние на показания гравиметра также будет значительно уменьшено (чем ближе период воз мущающих ускорений к основному, тем лучще будет исключаться их влияние на показания гравиметра). Маятники системы гравиметра слабо демпфированы и это обстоятельство позволит значительно уменьшить амплитудн фазовые искажения сигнала. Температурная компенсация макета гравиметра осуществлялась методом изменения плеча маятника основной системы. Период собственных колебаний маятника основной системы был равен 6, с, дополнительной - около 0,5 с. Угол закр чивания нитей подвеса маятника дополнительной системы был равен 70 их дли на равна 10 мм, диаметр около 40 мк. Главная пружина имела 2О витков, диаметр пружины ровен 11 мм. Шаг навивки пру- жлны 0,5 мм, растяже1ше пружины равно 7 О мм. Исследования показали, что предлагаемый гравиметр имеет назначительный дрейф нульпунктп, но превышающий О,О1-О,03 мгл в сутки. 1р1гчем дрейф был 3HaKonopi:MOfiHbi4f, что можно объяснить нокоторыми колооаниями темперйТЯ)Ы внутри Jipufuiin. /мм;1риый дрейф З месяц состанульпункта П виметра за вил -О,2 мгл. Формула изобретения Гравиметр для измерения ускорения силы тяжести, содержащий корпус, чувствительную) кварцевую систему, состоящую из маятника с зеркалом, подвещенного на горизонталь1 ых нитях в измерительной рамке, снабженной измерительной и диапазонной пружинами и закрепленной на горизонтальных нитях в монтажной рамке, главную пружину, фотоэлектрический преобразователь, термостат, отсчетное устройство и регистратор, отличающийся тем, что, с целью повьщ1ения точности измерения за счет уменьщения дрейфа нульпункта гравиметра, амплитудно-фазовых искажений сигнала и влияния вертикальных инерциальных ускорений, в чувствительную систему вв&дены юстировочный винт с упругой пружинойи дополнительная упругая система, состоящая из горизонтал1-,но расположенного маятника, подвешенного в монтажной рамке, соединенной с основанием системы, на горизонтальных упругих нитях и связанного с котировочным винтом пооредством упругой пружины винта, при этом чувствительная кварцевая система и дополнительная упругая система связаны между собой главной пружиной так, что один конец пружины жестко закреплен на рычаге кварцевой системы с той же стороны относительно нитей подвеса, с которой находится центр масс маят ника этой системы, а второй конец закреплен на рычаге дополнительной системы, который является продолжением маятника дополнительной системы и расположен относительно нитей подвеса с противоположной центру масс маятника стороНы. Источники информации, принятые во внимание при экспертизе 1.Веселов К. Е., Сагитов М. У. Гравиметрическая разведка, Недра, 1968, с. 1О9-212. 2.Патент США № 3583.225, кл. 73-382, 1965. 3.Авторское свидетельство СССР № 354385, кл.О O1V 7/О2, 197О (прототип). 4.Прикладная геофизика, вып. 79, М., Недра, 1975, с. 159-170 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИМЕТР | 2008 |
|
RU2370794C1 |
| Гравиметр | 1979 |
|
SU1099302A1 |
| ГРАВИМЕТР | 2007 |
|
RU2345387C1 |
| Гравиметр | 1982 |
|
SU1080103A1 |
| СКВАЖИННЫЙ ГРАВИМЕТР | 1966 |
|
SU179486A1 |
| НАКЛОНОМЕР | 2001 |
|
RU2187829C1 |
| Гравитационный вариометр | 1983 |
|
SU1115002A1 |
| МИКРОБАРОГРАФ | 2002 |
|
RU2231032C1 |
| Бестермостатный гравиметр | 1959 |
|
SU128155A1 |
| Магнитометр | 1981 |
|
SU949603A1 |