1
Изобретение относится к электроприводам постоянного тока с релейным управлением.
Известны схемы реверсивных релейных электроприводов постоянного тока с выходным каскадом релейного усилителя на тиристорах 1 или на транзисторах 2.
Общий недостаток известных замкнутых систем релейного привода постоянного тока - автоколебательность и, как следствие, низкие энергетические характеристики. Указанный недостаток является ограничивающим фактором применения релейных систем постоянного тока.
Некоторое ограничение амплитуды автоколебаний в известных замкнутых релейных системах осуществляется включением корректирующих устройств на входе системы или в цепи обратной связи.
В известном электроприводе двигатель постоянного тока подключен к релейному усилителю, на входе которого имеется сумматор.
На вход сумматора поступает входной сигнал Шх, сигнал обратной связи USvx с блока, преобразующего угол поворота двигателя в пропорциональное напряжение, сигнал коррекции, поступающий с корректирующего устройства, содержащего два резистора и два конденсатора.
На вход корректирующего устройства подано напряжение с тахогенератора, пропорциональное скорости двигателя. На выходе корректирующего устройства напряжение пропорционально производной от скорости, т. е. ускорению привода. Поступая на вход сумматора, напряжение UK способствует уменьшению амплитуды автоколебаний. Однако автоколебания при малой зоне нечувствительности системы остаются, так Как в зоне нечувствительности отсутствует электрическоеторможение привода.
Целью изобретения является устранение автоколебаний в системе. реверси,вного ре лейного привода постоянного тока и улучшение его энергетических характеристик.
Это достигается тем, что в реверсивный электропривод введено два трехпозиционных полупроводниковых реле, между выходными зажимами первого из которых и входными зажимами второго включено корректирующее устройство интегро-дифференцирующего типа, при этом вход первого реле подключен к выходу сумматора, а выход
второго - к блоку управления вентилями усилителя. - .
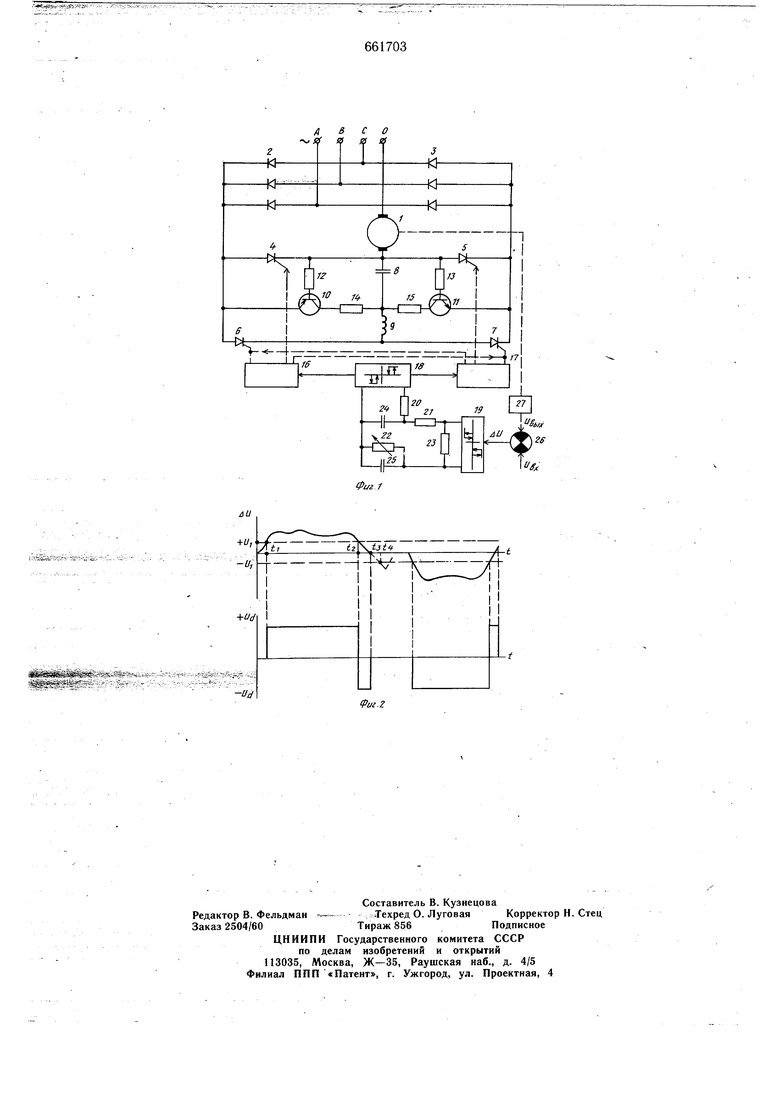
На фиг. 1 изображена принциттиальная схема электропривода; на фиг. 2 - временные диаграммы работы привода.
Реверсивный релейный электропривод содержит исполнительный двигатель постоянного тока 1, подключаемый к выпрямителю 2 или 3 в зависимости от требуемого направления вращения.
Для подключения двигателя к соответствующему выпрямителю служат силовые тиристоры 4 и 5, а для выключения силовых тиристоров - коммутирующие тиристоры 6 и. 7 вместе с блоком искусственной коммутации, содержащим коммутирующие конденсатор 8 и дроссель 9, а также зарядные транзисторы 10 и 11 и резисторы 12-15.
Блоки 16 и 17 осуществляют управление ;силрвыми и коммутирующими тири-сторами усилителя.
В каждом из блоков 16 и 17 содержится генератор управляющих импульсов в виде симметричного мультивибратора и импульсный трансформатор. Генератор импульсой обеспечивает включение и поддержание во включенном состоянии соответствующего силового тиристора, а импульсный трансформатор служит для подачи единичных импульсов на коммутирующие тиристоры.
Управление блоками 16 или 17 осуществлено от трехпозиционного транзисторного реле 18 с коллекторной обратной связью, В свою очередь управление реле 18 происходит от идентичного реле 19 через интегро - дифференцирующий контур, образованный резисторами 20-23 и конденсаторами 24, 25.
Управляющий сигнал и сигнал обратной связи поданы на вход реле 19 через элемент сравнения 26;
Блок 27 предназначен для преобразования угла поворота вала двигателя в пропорциональное напряжение.
Электропривод работает следующим образом.
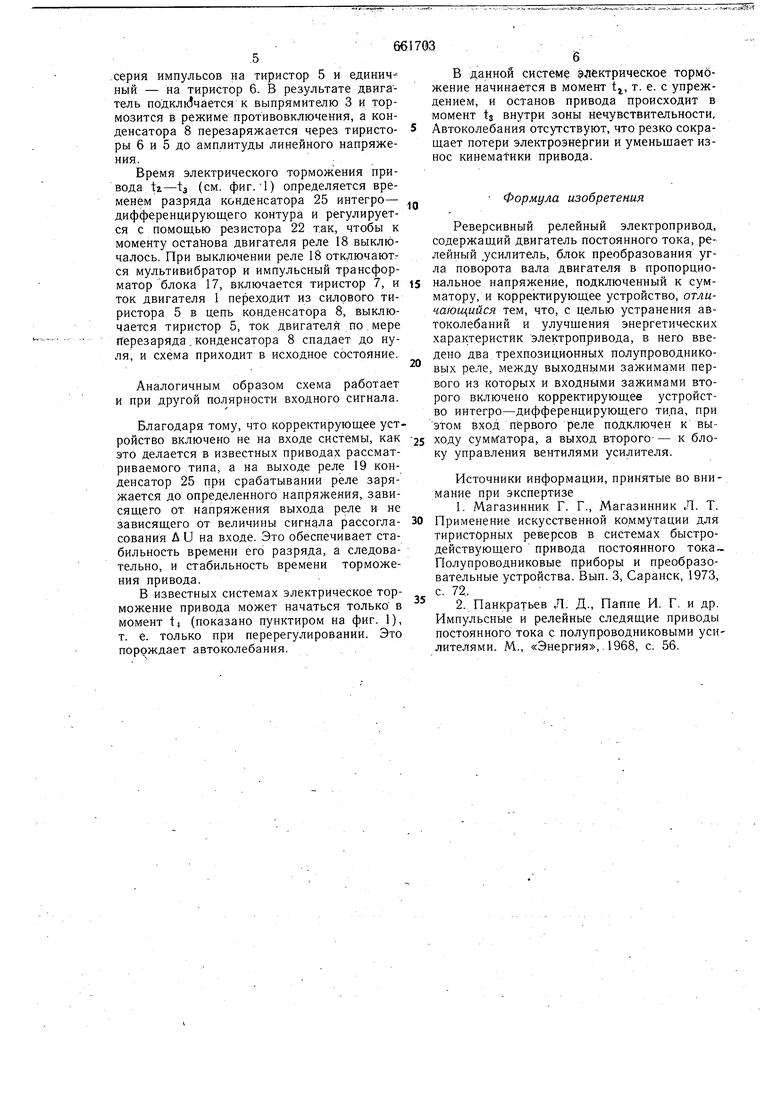
В исходном состоянии все тиристоры заПерты, исполнительный двигатель I выключен. .При подаче на элемент сравнения 26 входного сигнала Шх, превыщающего по величине порог срабатывания Ui (см. фиг. 2) т. е. чувствительность. реле 19, последнее включается. Полярность напряж.ения на выходе реле определяется полярностью входного сигнала. Под действием выходного напряжения реле 19 практически мгновенно включается реле 18. Небольщая задержка, обусловленная постоянными времени фильтра, состоящего из резисторов 21, 22 и конденсатора 24, необходима для восстановления запирающих свойств тиристоров в динамических режимах |1аботы системы. Реле 18 подключает (в зависимости от. полярности входного сигнала) блок 16 или 17. Допустим, что подключен блок 16. Тогда запускается мультивибратор, находящийся в этом
.блоке, и на тиристор 4 поступает серия импульсов в течение всего времени работы мультивибратора, т. е. пока включено реле 18.
Одновременно через содержащийся в блоке 16 импульсный трансформатор на тиристор 7 поступает единичный импульс. Таким образом, при включении блока 16 одновременно включаются тиристоры 4 и 7. Двигатель 1 через тиристор 4 подключается к напряжению (см. фиг. 2) выпрямителя 2 и начинает вращаться в заданном направлении, а по цепи: тиристор 4 - конденсатор 8 - дроссель 9 - тиристор 7 происходит заряд конденсатора 8 до суммарного напряжения выпрямителей 2 и 3 (т. е. до амплитуды линейного напряжения). После заряда конденсатора 8 ток через тиристор 7 становится равным нулю и тиристор 7 включается. Транзистор 11 в это время будет отперт падением напряжения на запертом тиристоре 5, поэтому через конденсатор 8 по коллекторной цепи транзистора 11 будет протекать небольщой ток, ограниченный сопротивлением резистора 15. Этот ток поддерживает конденсатор 8 в заряженном состоянии. По мере отработки двигателем заданной команды на выходе блока 27 ра.стет напряжение U&x. В момент ta (фиг. 3), когда разность входного и выходного напряжений ди ШлЧЛй л- станет меньще напряжения выключения реле 19, последнее отключится.
Интегро-дифференцирующее звено после отключения реле 19 работает следующим образом. .
В период it-ta, т. е. до отключения реле 19, конденсаторы 24 и 25 заряжены под действием напряжения на выходе реле 19. Допустим, что гтлюс был на верхнем выходном зажиме реле 19. Тогда конденсатор 24 будет иметь плюс на правой, а конденсатор 25 - на левой обкладке. Емкость конденсатора 25 выбрана намного больще, чем емкость конденсатора 24, поэтому при выключении реле 19 конденсатор 25, разряжаясь по контуру 25-23-21-24 25 практически мгновенно (резисторы 23 и 21 - низкоомные), перезаряжает конденсатор 24, что приводит к изменению полярности на входе реле 18. Реле 18 переключается, выключает блок 16 и включает блок 17. При выключении блока 16 прекращает свою работу мультивибратор, т. е. снимаются отпирающие импульсы с силового тиристора 7, одновременно рвется цепь питания импульсного трансформатора в блоке 16, в результате чего на тиристор 6 выдается единичный отпирающий импульс, и ток нагрузки .переходит из хилового тиристора 4 в коммутирующий 6. В ходе разряда конденсатора 8 тиристор 4 запирается.
Включение блока 17 приводит к включению имеющихся в нем мультивибратора и импульсного трансформатора. Подается -Серия импульсов на тиристор 5 и единич-ный - на тиристор 6. В результате двигатель поДклнЗчается к выпрямителю 3 и тормозится в режиме противовключения, а конденсатора 8 перезаряжается через тиристоры 6 и 5 до амплитуды линейного напряжения. Время электрического торможения привода ii-ta (см. фиг.) определяется временем разряда конденсатора 25 интегро- дифференцирующего контура и регулируется с помощью резистора 22 так, чтобы к моменту останова двигателя реле 18 выключалось. При выключении реле 18 отключаютг ся мультивибратор и импульсный трансформатор блока 17, включается тиристор 7, и ток двигателя 1 переходит из силового тиристора 5 в цепь конденсатора 8, выключается тиристор 5, ток двигателя по мере перезаряда.конденсатора 8 спадает до нуля, и схема приходит в исходное состояние. Аналогичным образом схема работает и при другой полярности входного сигнала. Благодаря тому, что корректирующее устройство включено не на входе системы, как это делается в известных приводах рассматриваемого типа, а на выходе реле 19 конденсатор 25 при срабатывании реле заряжается до определенного напряжения, зависящего от напряжения выхода реле и не зависящего от величины сигнала рассогласования Д и на входе. Это обеспечивает стабильность времени его разряда, а следовательно, и стабильность времени торможения привода. В известных системах электрическое торможение привода может начаться только в момент t4 (показано пунктиром на фиг. 1), т. е. только при перерегулировании. Это порождает автоколебания. В данной системе электрическое торможение начинается в момент t, т. е. с упреждением, и останов привода происходит в момент ts внутри зоны нечувствительности. Автоколебания отсутствуют, что резко сокращает потери электроэнергии и уменьшает износ кинема№ки привода. Формула изобретения Реверсивный релейный электропривод, содержащий двигатель постоянного тока, релейный .усилитель, блок преобразования угла поворота вала двигателя в пропорциональное напряжение, подключенный к сумматору, и корректирующее устройство, огугичающийся тем, что, с целью устранения автоколебаний и улучшения энергетических характеристик электропривода, в него введено два трехпозиционных полупроводниковых реле, между выходными зажимами первого из которых и входными зажимами второго включено корректирующее устройство интегро-дифференцирующего типа, при этом вход первого реле подключен к выходу cyMiwaTopa, а вь1ход второго- - к блоку управления вентилями усилителя, Источники информации, принятые во внимание при экспертизе 1.Магазинник Г. Г., Магазинник Л. Т. Применение искусственной коммутации для тиристорных реверсов в системах быстродействующего привода постоянного токаПолупроводниковые приборы и преобразовательные устройства. Вып. 3, Саранск, 1973, с. 72. 2.Панкратьев Л. Д., Паппе И. Г. и др. Импульсные и релейные следящие приводы ПОСТОЯННОГО тока с полупроводниковыми усилителями. М., «Энергия,. 1968, с. 56.
А S с о

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дуговой сварки с короткими замыканиями дугового промежутка | 1981 |
|
SU988486A1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Устройство для токовой защиты | 1975 |
|
SU667175A3 |
| Ч-П ^ . 1^.- . . . —. .пТ[»ЬЬ;;-ПЛ;:. ^1ЁИБЛИС L^-AА. Ф. Третьяков | 1971 |
|
SU290390A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Реверсивный электропривод | 1972 |
|
SU610274A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU748760A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |