(54) ВИБРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1980 |
|
SU949576A1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| Устройство для измерения углов отклонения подвижного объекта | 1991 |
|
SU1810756A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ВИБРАТОР СЕЙСМИЧЕСКИЙ МОБИЛЬНЫЙ | 2006 |
|
RU2316793C1 |
| КВАЗИУДАРНЫЙ ЦЕНТРОБЕЖНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 1997 |
|
RU2121889C1 |
| СПОСОБ ПОСТРОЕНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ КРУГОВОГО ОБЗОРА ПРИВЯЗНОГО АЭРОСТАТА | 2017 |
|
RU2652512C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ ИСПЫТУЕМОМУ ОБЪЕКТУ | 1989 |
|
RU2010206C1 |
1
Изобретение относится к устройствам для получения и передачи механических коЛёбаний и может быть использовано, например, для возбуждения сейсмических сигналов в земле при геологоразведочных работах.
Известны инерционные вибраторы, содержащие закрепленную на приводном валу дебалансную массу 1.
Недостаток известных вибраторов в сложности регулирования параметров вибрации.
Наиболее близким к изобретению по технической сущности и достигаемому эффекту является вибратор, содержащий маховик с приводом, опорное устройство и блок управления 2.
Недостатком такого вибратора является нectaбильнocть и сложность регулирования параметров вибрации.
Цель изобретения - повышение эффективности регулирования параметров вибрации.
Указанная цель достигается за счетиспользования момента гироскопической ре.акции. Для этого вибратор снабжен гирокамерой, в которой размещен маховик,
и карданным подвесом, связьгвающим тирОкамеру с опорным устройством, а в качестве привода используется моментный двигатель, установленный на оси прецессии карданного подвеса.
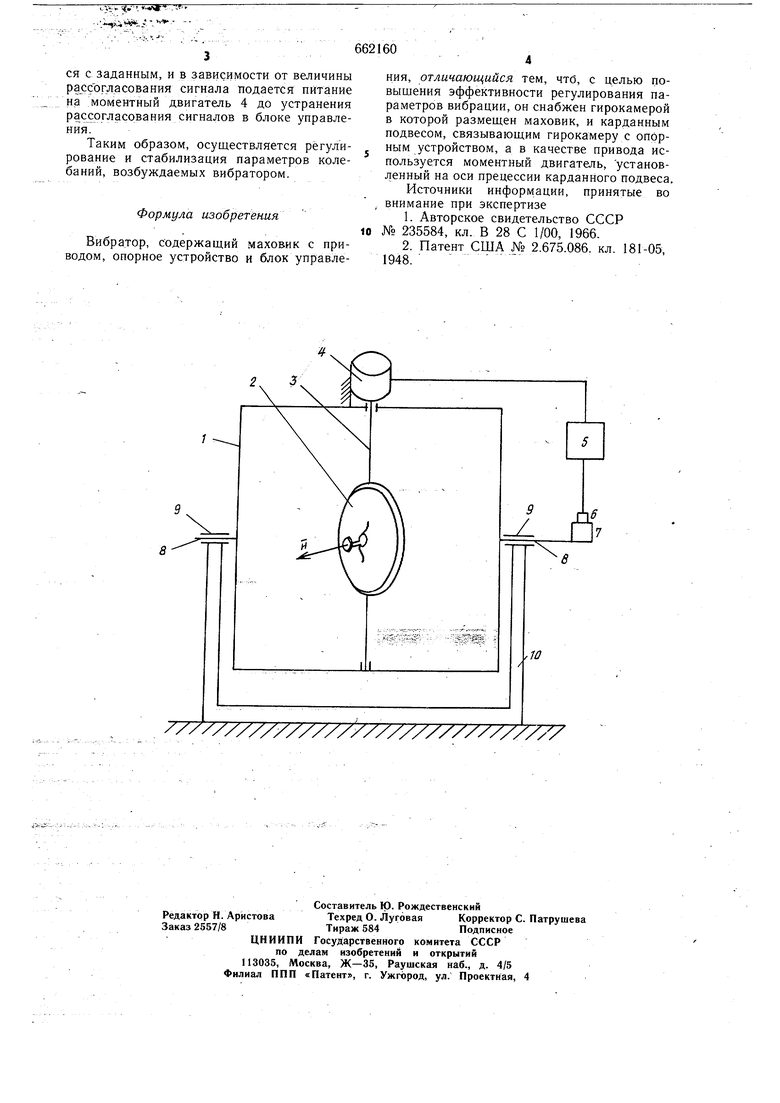
На чертеже приведена схема вибратора.
Маховик (на чертеже не показан) установлен в размещенной в карданном подвесе 1 гирокамере 2 и имеет свободу вращения относительно оси прецессии 3 карданного подвеса 1, на которой установлен привод- моментный двигатель 4. Последний соединен через блок управления 5 с датчиком 6, закрепленным на испытательной платформе 7, жестко соединенной с внещней осью 8, установленной в опорах 9. Посредством оси 8 карданный подвес 1 устанавливается на опорном устройстве 10.
Вибратор работает следующим образом.
При воздействии на гирокамеру 2 с маховиком внещнего момента двигателя 4 в опорах 9 возникают нагрузки, которые через опорное устройство 10 воздействуют на грунт и возбуждают сейсмические колебания, которые передаются испытательной платформе 7 с установленным на ней испытуемым.объектом. Датчик 6 передает параметры колеба,ний (амплитуду, частоту и др.) на блок управления 5, в котором сигнал сравнивается с заданным, и в зависимости от величины рассогласования сигнала подается питание на моментный двигатель 4 до устранения рассогласования сигналов в блоке управления.
Таким образом, осуществляется регулирование и стабилизация параметров колебаний, возбуждаемых вибратором.
Формула изобретения
Вибратор, содержащий маховик с приводом, опорное устройство и блок управле662160
ния, отличающийся тем, что, с целью повышения эффективности регулирования параметров вибрации, он снабжен гирокамерой в которой размещен маховик, и карданным подвесом, связывающим гирокамеру с опорным устройством, а в качестве привода используется моментный двигатель, установленный на оси прецессии карданного подвеса. Источники информации, принятые во внимание при экспертизе
