Изобретение относится к области оптического приборостроения, в частности к гиростабилизирующим устройствам, размещаемым на подвижных объектах для обеспечения поля зрения и управления линией визирования оптических приборов в вертикальной и горизонтальной плоскостях.
Современные подвижные объекты для решения задач стабилизации поля зрения и управления линией визирования снабжаются различными стабилизирующими устройствами, обеспечивающими среднеквадратическую точность стабилизации линии визирования прицелов на уровне 0,05-0,1 мрад, что позволяет решать следующие задачи:
обеспечить высокое качество наблюдения и точность прицеливания,
выполнить операции измерения дальности,
повысить разрешающую способность прицела и дальность обнаружения цели.
Как правило, стабилизирующие устройства представляют собой различные варианты гироскопических устройств, соединенных с одним или несколькими зеркалами, входящими в оптическую систему визирования.
Известна система стабилизации линии визирования (ССЛВ), описанная в патенте Франции N 1549505, кл. F 41 G "Усовершенствование в прицелах с гироскопической системой ориентации"
ССЛВ обеспечивает стабилизацию линии визирования в вертикальной и горизонтальной плоскостях.
В подшипниках корпуса устанавливается платформа, обладающая свободой вращения вокруг вертикальной оси. В подшипниках платформы установлены зеркало и рамка с двумя одноосными гироскопическими стабилизаторами, при этом горизонтальная ось вращения зеркала связана с горизонтальной осью вращения рамки ленточной передачей 1:2. На горизонтальной оси вращения рамки и вертикальной оси платформы установлены моментные двигатели. Одноосные гироскопические стабилизаторы установлены в рамке таким образом, что их выходные оси параллельны оси платформы и горизонтальной оси зеркала. Для обеспечения стабилизации датчики угла одноосных гироскопических стабилизаторов электрически связаны с моментными двигателями через усилители.
Описанная в патенте ССЛВ обладает следующими недостатками:
низкая точность стабилизации в горизонтальной плоскости при качке объекта по тангажу, обусловленная неточностью совмещения системы координат, связанной со стабилизирующим устройством, относительно системы координат, связанной с линией визирования;
наличие незатухающих колебаний зеркала в горизонтальной плоскости в условиях вибрации объекта, обусловленных применением в качестве стабилизирующего устройства одноосного гироскопического стабилизатора, имеющего низкую резонансную частоту нутационных колебаний, находящуюся в диапазоне вибраций, возникающих при движении объекта;
низкая точность наведения линии визирования на цель в режиме управления оператором, обусловленная наличием большой скорости собственного дрейфа стабилизирующего направления и малым диапазоном скоростей наведения, присущим одноосным гироскопическим стабилизаторам.
Наиболее близким по технической сущности и достигаемому результату к настоящему изобретению является система стабилизации зеркала (ССЗ), разработанная ЦКБ "Пеленг", принцип работы которой изложен в техническом описании 1572.00.00.000 ТО, структурно-кинематическая схема ССЗ представлена на фиг. 1.
ССЗ, в составе блока зеркала, блока управления и датчика угла гироскопического, обеспечивает стабилизацию поля зрения и управление линией визирования по каналу вертикального наведения (ВН) и каналу горизонтального наведения (ГН), при этом среднеквадратическая ошибка стабилизации при движении объекта по трассе составляет 0,15-0,2 мрад.
В подшипниках корпуса блока зеркала установлена платформа с вертикальной осью, по оси платформы установлены датчик угла ГН и исполнительный двигатель. В подшипниках платформы установлены одноосный гироскопический стабилизатор (ОГС) и зеркало с горизонтальной осью, причем горизонтальная ось зеркала связана ленточной передачей 1:2 с выходной осью ОГС и осью датчика угла ВН, установленного на платформе.
Стабилизация линии визирования в вертикальной плоскости осуществляется ОГС, управляющим разворотом зеркала. ОГС представляет собой электромеханическую систему, состоящую из гиромотора, установленного в кардановом подвесе, датчика угла прецессии (ДУП) и магнита наведения, установленных по оси внутренней рамки подвеса, двигателя разгрузки (ДР), установленного по выходной оси ОГС. Ось вращения гиромотора удерживается на направлении, перпендикулярном к плоскости наружной рамы карданова подвеса с помощью контура межрамочной коррекции, включающего ДУП, усилительно-корректирующее устройство (УКУ) и др.
Стабилизация линии визирования в горизонтальной плоскости осуществляется электроприводом ГН по сигналам гироскопического чувствительного элемента. В качестве гироскопического чувствительного элемента используется датчик угла гироскопический (ДУГ), при этом ДУГ и блок зеркала жестко устанавливаются на объекте таким образом, чтобы линия визирования была параллельна вектору кинетического момента гиромотора.
ДУГ является электромеханической системой, измеряющей угол поворота объекта относительно стабилизируемого направления, и состоит из гиромотора, установленного в кардановом подвесе, датчика положения гиромотора по каналу ВН и датчика момента, установленных на оси внутренней рамы подвеса, двигателя стабилизации и датчика положения гиромотора по каналу ГН, установленных на оси вращения наружной рамы подвеса.
Для работы ДУГ в системе координат, связанной с зеркалом, обеспечивается слежение вектора кинетического момента гиромотора за линией визирования электроприводом слежения. Электропривод слежения включает сумматор, усилительно-корректирующее устройство, двигатель стабилизации, датчик положения ВН. На вход сумматора электропривода слежения поступают сигналы с датчика угла ВН блока зеркала.
Компенсатор перекрестной связи, вход которого соединен датчиком угла положения линии визирования по каналу ВН, а выход электрически связан с электроприводом горизонтального наведения, устраняет погрешность стабилизации линии визирования в горизонтальной плоскости, возникающую при качке объекта по оси тангажа.
ССЗ обладает рядом существенных недостатков:
низкая точность стабилизации в горизонтальной плоскости, обусловленная неточностью совмещения системы координат, связанной с осями подвеса ДУГ относительно системы координат, связанной с осями подвеса зеркала (неточность выставки ДУГ относительно блока зеркала);
наличие погрешности стабилизации линии визирования в горизонтальной плоскости, возникающей при качке объекта по крену, обусловленной ошибками слежения вектора кинетического момента гиромотора за линией визирования.
низкая точность наведения линии визирования в режиме управления оператором, обусловленная наличием большой скорости собственного дрейфа стабилизированного направления линии визирования и малым диапазоном скоростей наведения, присущим одноосным гироскопическим стабилизаторам.
Задачей настоящего изобретения является повышение точности стабилизации линии визирования за счет устранения погрешностей, обусловленных неточностью совмещения системы координат, связанной с гироскопическим чувствительным элементом, относительно системы координат, связанной с подвесом зеркала, повышение точности наведения линии визирования на цель за счет устранения дрейфа стабилизированного направления и увеличения диапазона скоростей наведения.
Для повышения точности стабилизации и наведения линии визирования в ССЛВ, содержащую корпус, платформу с вертикальной осью, размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор (ОГС) с контуром управления, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, датчик угла, кинематически связанный с осью зеркального отражателя, компенсатор перекрестной связи (КПС), вход которого соединен с выходом датчика угла, исполнительный двигатель, установленный по вертикальной оси платформы, первое усилительно-корректирующее устройство (УКУ), выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом компенсатора перекрестной связи, а выход соединен с входом первого усилительно-корректирующего устройства, гироскопический чувствительный элемент, в отличие от прототипа гироскопический чувствительный элемент выполнен в виде гироскопа с внутренним кардановым подвесом (ГВК) и жестко связан с выходной осью одноосного гироскопического стабилизатора, при этом оси чувствительности гироскопа с внутренним кардановым подвесом расположены соосно с вертикальной осью платформы и горизонтальной осью зеркального отражателя, и дополнительно введено второе усилительно-корректирующее устройство, выход которого, подключен к входу контура управления одноосного гироскопического стабилизатора, первый и второй выходы гироскопа с внутренним кардановым подвесом соответственно подключены к второму усилительно-корректирующему устройству и второму входу сумматора.
Использование в качестве гироскопического чувствительного элемента ГВК:
обеспечивает высокую точность сохранения в пространстве стабилизируемого направления, задаваемого ротором ГВК, поскольку ГВК работает в оптимальном режиме (отклонение вектора кинетического момента ротора ГВК относительно корпуса ГВК является минимальным), что уменьшает действие вредных моментов, влияющих на скорость систематического дрейфа;
позволяет повысить точность наведения линии визирования на цель в режиме управления оператором за счет расширения диапазона скоростей наведения.
Размещение ГВК на единой платформе с зеркальным отражателем и жесткая связь с выходной осью ОГС устраняет погрешности стабилизации в горизонтальной плоскости, обусловленные неточностью совмещения системы координат, связанной с осями чувствительности ГВК относительно системы координат, связанной с осями подвеса зеркального отражателя.
Вредные моменты, действующие по оси внутренней рамки карданова подвеса ОГС, вызывают прецессию гироскопа, разворот выходной оси ОГС и связанного с ней зеркального отражателя с постоянной скоростью, что приводит к смещению линии визирования относительно стабилизированного направления. Отмеченный выше дрейф линии визирования усложняет прицеливание и сопровождение цели оператором. Введение контура слежения, включающего последовательно соединенные первый выход ГВК (выходные обмотки датчика угла вертикального наведения), второе УКУ и контур управления ОГС, обеспечивает устранение углового рассогласования между выходной осью ОГС относительно задаваемого ротором ГВК стабилизированного направления, что позволяет исключить дрейф линии визирования.
Реализация системы стабилизации линии визирования в соответствии с изобретением позволила решить следующие задачи.
1. Повысить точность стабилизации линии визирования в горизонтальной плоскости:
среднеквадратическая ошибка стабилизации уменьшена до уровня 0,1 мрад за счет применения ГВК, обладающего высокой точностью, до 0,05 мрад, сохранения стабилизированного положения в пространстве вектора кинетического момента ротора ГВК;
устранены ошибки стабилизации, вызванные неточностью выставки гироскопического чувствительного элемента относительно осей подвеса зеркального отражателя за счет размещения ГВК на единой платформе с зеркальным отражателем и жесткой связи с выходной осью ОГС.
2. Повысить точность прицеливания и сопровождения цели за счет расширения диапазона скоростей наведения линии визирования и устранения дрейфа стабилизируемого направления, вызванного вредными моментами ОГС.
3. Построение ССЛЗ по указанной схеме также позволяет:
уменьшить габаритные размеры ССЛВ;
значительно снизить энергопотребление;
обеспечить взаимозаменяемость ССЛВ.
На фиг.1 представлена структурно-кинематическая схема ССЗ (прототип).
На фиг.2 представлена структурно-кинематическая схема ССЛВ.
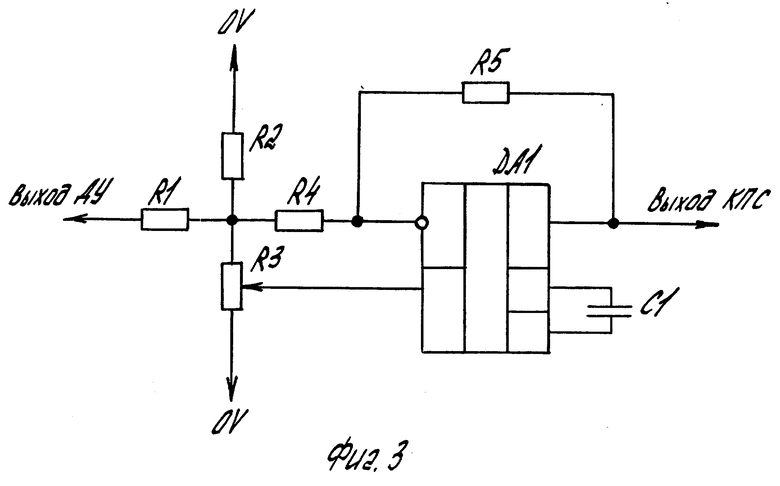
На фиг.3 представлена принципиальная электрическая схема КПС.
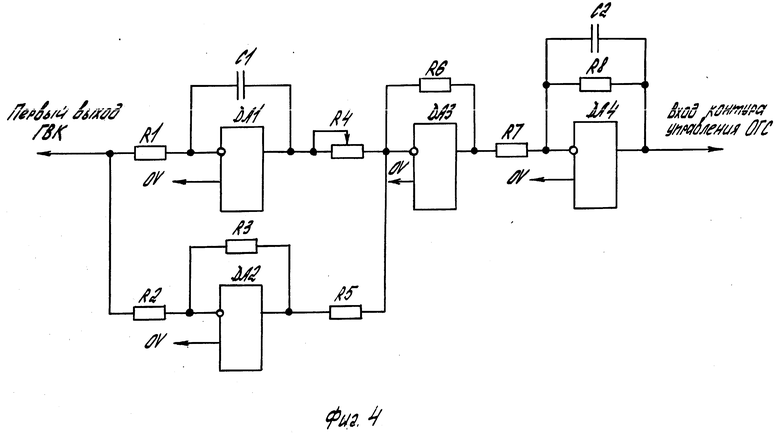
На фиг.4 представлена принципиальная электрическая схема второго УКУ.
Система стабилизации линии визирования содержит корпус 1, закрепленный на подвижном объекте, платформу 2 с вертикальной осью 3, размещенную в подшипниках корпуса 1, вертикальный отражатель 5 с горизонтальной осью 6, размещенный в подшипниках 7 платформы 2, ОГС 8 с контуром управления 9, выходная ось 10 которого размещена в подшипниках 11 платформы 2 и кинематически связана передачей 12 в соотношении 2:1 с горизонтальной осью 6 зеркального отражателя 5, датчик угла 13, кинематически связанный с горизонтальной осью 6 зеркального отражателя 5, КПС 14, вход которого соединен с выходом датчика угла 13, исполнительный двигатель 15, установленный по вертикальной оси 3 платформы 2, первое УКУ 16, выход которого подключен к исполнительному двигателю 15, сумматор 17, первый вход которого соединен с выходом КПС 14, а выход соединен с входом первого УКУ 16, второе УКУ 18, выход которого подключен к входу контура управления 9 ОГС 8, ГВК 19, жестко связанный с выходной осью 10 ОГС 8 и установленный так, что оси чувствительности расположены соосно с вертикальной осью 3 платформы 2 и с горизонтальной осью 6 зеркального отражателя 5, а первый и второй выходы ГВК 19 соответственно подключены к второму УКУ 18 и второму входу сумматора 17.
Основными элементами ГВК 19 являются ротор, задающий стабилизируемое направление, электродвигатель, упругий подвес, датчики угла, датчики момента. Конструктивные схемы реализация ГВК 19 и принцип работы описаны, например, в книге Д.С. Пельпор и др. "Динамически настраиваемые гироскопы", Машиностроение, 1988 г, конкретная ССЛВ выполнена с использованием малогабаритного гироскопа МГ-4.
В качестве датчика угла 13 применен вращающийся трансформатор 2,5 ВТ, 0,05/0,1 ЛШЗ.010.394. ЛШО.301.014ТУ.
Электропривод горизонтального наведения, включающий датчик угла ГВК 19, выдающий сигнал рассогласования в горизонтальной плоскости, сумматор 17, первое УКУ 16, исполнительный двигатель 15, может быть выполнен в соответствии с авт.св. N 1640668.
В качестве исполнительного двигателя 15 использован датчик момента ДЭМ-12, 6Д2.326.012ТУ.
Конструктивная схема реализации и принцип работы ОГС 8 с контуром управления 9 и контуром межрамочной коррекции описаны: например, в книге Д.С. Пельпор "Гироскопические системы", часть I, Высшая школа, 1971 г.
Контур управления 9, предназначенный для управления поворотом выходной оси ОГС 8, содержит усилитель мощности, датчик момента и гироскоп.
КПС 14, предназначенный для формирования сигнала, пропорционального погрешности стабилизации линии визирования, обусловленной погрешностью совмещения осей чувствительности ГВК 19 и горизонтальной осью 6 зеркального отражателя 5, возникающей при качке объекта по оси тангажа, может быть реализован в соответствии с фиг.3.
Сигнал, соответствующий погрешности, формируется электронным устройством, реализованным на операционном усилителе ДА1 (УД14), включенный по модифицированной схеме дифференциального усилителя, позволяющего регулировкой резистора R3 получить выходной сигнал в пределах от минус Uвх до Uвх. При качке объекта по тангажу с датчика угла 13 снимается сигнал, пропорциональный углу поворота объекта относительно зеркального отражателя 5, и подается на вход КПС 14, одновременно в КПС 14 резистором R3 задается сигнал, пропорциональный погрешности совмещения осей чувствительности ГВК 19 и горизонтальной оси 6 зеркального отражателя 5. КПС 14 обеспечивает перемножение двух сигналов. С выхода КПС 14 сигнал, пропорциональный погрешности, подается на вход сумматора 17, и далее через первое УКУ 16 поступает на исполнительный двигатель 15, который поворачивает платформу 2 в горизонтальной плоскости с учетом погрешности.
Второе УКУ 18, предназначенное для формирования корректирующего сигнала в контур управления 9 ОГС 8, может быть реализовано в соответствии с фиг.4.
Сигнал с первого выхода ГВК 19 поступает на входы двух параллельных каналов, один из которых содержит интегрирующее звено, реализованное на операционном усилителе ДА1, а другой содержит усилитель с единичным коэффициентом усиления, реализованный на операционном усилителе ДА2. Сигналы обоих каналов суммируются на операционном усилителе ДА3, и суммарный сигнал поступает на вход апериодического звена, реализованного на операционном усилителе ДА4.
Приведенное электронное устройство реализует закон управления, который описывается передаточной функцией вида:
где K коэффициент усиления;
T1 постоянная времени дифференцирующего звена;
T2 постоянная времени апериодического звена;
P оператор дифференцирования.
Наличие большого коэффициента усиления второго УКУ 18 в области низких частот (f<f1), обеспечивает устранение статической ошибки углового рассогласования между выходной осью 10 ОГС 8 и ротором ГВК 19 и исключают дрейф линии визирования. Значительное ослабление коэффициента усиления второго УКУ 18 в области высоких частот (f>f2) позволяет устранить вредное влияние высокочастотного сигнала помехи, возникающего в условиях вибрации, на работу ОГС 8, в частности, уменьшить размытые поля зрения.
Стабилизация линии визирования в вертикальной плоскости осуществляется ОГС 8, управляющим поворотом зеркального отражателя 5 вокруг горизонтальной оси 6.
ОГС 8 представляет собой электромеханическую систему, состоящую из гироскопа, внутренней и наружной рамок карданова подвеса. По оси вращения внутренней рамки установлены датчик угла прецессии (ДУП) и датчик момента контура управления, на платформе 2 установлен двигатель разгрузки, кинематически связанный с выходной осью 10 ОГС 8.
Ось вращения гироскопа удерживается на направлении, перпендикулярном к плоскости наружной рамы карданова подвеса, с помощью контура межрамочной коррекции, включающего ДУП, усилительно-корректирующее устройство (УКУ) и двигатель разгрузки.
При движении объекта по выходной оси 10 ОГС 8 действуют внешние возмущающие моменты (момент трения в подшипниках, момент тяжения токоподводов, моменты дебаланса, инерционные моменты).
Под влиянием внешних возмущающих моментов, в соответствии с законом прецессии, гироскоп поворачивается вокруг оси внутренней рамки с угловой скоростью  где
где  угловая скорость поворота; Мвс моменты внешних сил, действующих по выходной оси 10 ОГС 8; H кинетический момент гироскопа.
угловая скорость поворота; Мвс моменты внешних сил, действующих по выходной оси 10 ОГС 8; H кинетический момент гироскопа.
При движении гироскопа с угловой скоростью  , по выходной оси 10 ОГС 8 действует инерционный гироскопический момент, равный
, по выходной оси 10 ОГС 8 действует инерционный гироскопический момент, равный  и направленный в сторону, противоположную внешнему возмущающему моменту, одновременно при повороте гироскопа на угол b с ДУП снимается сигнал, пропорциональный углу поворота, и через УКУ поступает на двигатель разгрузки, который развивает момент, пропорциональный углу поворота b и также направленный в сторону, противоположную внешнему возмущающему моменту. В динамике инерционный гироскопический момент и момент, развиваемый двигателем разгрузки, уравновешивают момент внешних сил и движение гироскопа вокруг оси внутренней рамки прекращается.
и направленный в сторону, противоположную внешнему возмущающему моменту, одновременно при повороте гироскопа на угол b с ДУП снимается сигнал, пропорциональный углу поворота, и через УКУ поступает на двигатель разгрузки, который развивает момент, пропорциональный углу поворота b и также направленный в сторону, противоположную внешнему возмущающему моменту. В динамике инерционный гироскопический момент и момент, развиваемый двигателем разгрузки, уравновешивают момент внешних сил и движение гироскопа вокруг оси внутренней рамки прекращается.
Таким образом, сумма всех моментов, действующих по выходной оси 10 ОГС 8, равна нулю, при этом выходная ось ОГС 8 и линии визирования сохраняют свое положение в пространстве, а зеркальный отражатель 5 поворачивается на угол, равный половине угла поворота объекта в вертикальной плоскости.
Стабилизация линии визирования в горизонтальной плоскости осуществляется электроприводом горизонтального наведения, включающим последовательно соединенные второй выход ГВК 19 (выходные обмотки датчика угла горизонтального наведения), сумматор 17, первое УКУ 16, исполнительный двигатель 15.
При движении объекта по трассе по вертикальной оси 3 платформы 2 действуют различные внешние возмущающие моменты (момент трения в подшипниках, момент тяжения токоподводов, моменты дебаланса, инерционные моменты), вызывающие отклонение платформы и линии визирования от стабилизируемого направления, задаваемого ротором ГВК 19, при этом со второго выхода ГВК 19 снимается сигнал, пропорциональный углу отклонения линии визирования относительно стабилизируемого направления в горизонтальной плоскости. Сигнал ГВК 19 через сумматор 17 подается в первое УКУ 16, формирующее закон управления исполнительным двигателем 15. С выхода первого УКУ 16 управляющее напряжение подается на обмотку исполнительного двигателя 15, который разворачивает платформу 2 с зеркальным отражателем 5 вокруг вертикальной оси 3, чтобы устранить рассогласование между линией визирования и ротором ГВК 19 (обнулить сигналы датчика угла ГВК 19) и, таким образом, сохранить в пространстве положение линии визирования.
При повороте объекта по оси тангажа с выхода датчика угла 13 снимается сигнал, пропорциональный углу поворота объекта относительно стабилизируемого направления в вертикальной плоскости, и подается на вход КПС 14. КПС 14 формирует сигнал, пропорциональный погрешности, обусловленной неточностью выставки осей чувствительности ГВК 19 относительно горизонтальной оси 6 зеркального отражателя 5. Сигнал с выхода КПС 14 подается на первый вход сумматора 17 электропривода горизонтального наведения, обеспечивающего поворот линии визирования в горизонтальной плоскости с учетом погрешности.
Контур слежения, включающий последовательно соединенный первый выход ГВК 19 (выходные обмотки датчика угла вертикального наведения ГВК 19), второе УКУ 18 и датчик момента контура управления 9 ОГС 8, обеспечивает слежение линии визирования за ротором ГВК 19, задающим стабилизируемое направление.
При наличии большой скорости дрейфа выходная ось 10 ОГС 8 разворачивается относительно стабилизируемого направления, при этом с первого выхода ГВК 19 снимается сигнал, пропорциональный углу отклонения линии визирования относительно задаваемого ротором ГВК 19 стабилизируемого направления в вертикальной плоскости. Сигнал ГВК 19 подается во второе УКУ 18, формирующее закон управления поворотом гироскопа ОГС 8. С выхода второго УКУ 18 управляющее напряжение подается в контур управления 9 ОГС 8, развивающий момент, под действием которого гироскоп прецессирует, и через ленточную передачу 12 разворачивает зеркальный отражатель 5, чтобы устранить рассогласование между линией визирования и ротором ГВК 19 (обнулить сигнал датчика угла ГВК 19) и, таким образом, сохранить в пространстве положение линии визирования.
Наведение линии визирования на цель осуществляется по сигналам управления, поступающим на обмотки момента ГВК 19. Под действием управляющих моментов ротор ГВК прецессирует со скоростью, пропорциональной величине управляющего напряжения, что приводит к изменению стабилизируемого направления в вертикальной и горизонтальной плоскостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2021 |
|
RU2785798C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| Система стабилизации изображения на подвижном основании | 2017 |
|
RU2733324C2 |

Использование: для обеспечения стабилизации поля зрения и управления линией визирования оптических приборов в вертикальной и горизонтальной плоскостях. Сущность изобретения: система стабилизации линии визирования содержит корпус, платформу с вертикальной осью, размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор (ОГС) с контуром управления, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей в соотношении 2:1 с горизонтальной осью зеркального отражателя, датчик угла, кинематически связанный с горизонтальной осью зеркального отражателя, компенсатор перекрестной связи (КПС), вход которого соединен с выходом датчика угла, исполнительный двигатель, установленный по вертикальной оси платформы, первое усилительно-корректирующее устройство (УКУ), выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом КПС, а выход соединен с входом первого УКУ, второе УКУ, выход которого подключен к входу контура управления ОГС, гироскоп с внутренним карданным подвесом (ГВК), жестко связанный с выходной осью ОГС и установленный так, что оси чувствительности расположены соосно с осью платформы и с горизонтальной осью зеркального отражателя, а первый и второй выходы ГВК соответственно подключены к второму УКУ и второму входу сумматора. 4 ил.
Система стабилизации линии визирования, содержащая корпус, платформу с вертикальной осью, размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор с контуром управления, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2 1 с горизонтальной осью зеркального отражателя, датчик угла, кинематически связанный с осью зеркального отражателя, компенсатор перекрестной связи, вход которого соединен с выходом датчика угла, исполнительный двигатель, установленный по вертикальной оси платформы, первое усилительно-корректирующее устройство, выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом компенсатора перекрестной связи, а выход с входом первого усилительно-корректирующего устройства, гироскопический чувствительный элемент, отличающаяся тем, что дополнительно введено второе усилительно-корректирующее устройство, в качестве гироскопического чуствительного элемента применен гироскоп с внутренним кардановым подвесом, жестко связанный с выходной осью одноосного гироскопического стабилизатора, при этом оси чувствительности гироскопа с внутренним кардановым подвесом расположены соосно с вертикальной осью платформы и с горизонтальной осью зеркального отражателя, первый и второй выходы гироскопа с внутренним кардановым подвесом соответственно подключены к второму усилительно-корректирующему устройству и второму входу сумматора, выход второго усилительно-корректирующего устройства подключен к входу контура управления одноосного гироскопического стабилизатора.
| Щипцы для завивки волос | 1924 |
|
SU1572A1 |
