Предлагаемое изобретение относится к области военной техники, в частности к зенитным ракетным комплексам (ЗРК) ближнего рубежа с оптической системой управления и радиокомандным наведением ЗУР. К числу наиболее важных проблем, связанных с созданием оптических систем управления, относится совершенствование оптико-электронных приборов с целью обеспечения стрельбы как с места, так и в движении. При этом важное значение приобретает вопрос интеграции датчиков и измерителей системы управления в едином конструктивном приборе.
Известен мачтовый обзорный прицел вертолета [1, 2], в сферическом корпусе которого размещена аппаратура обнаружения и опознавания, включающая в себя телевизионную камеру, тепловизионную камеру и лазерный дальномер-целеуказатель. Стремясь преодолеть чрезмерную вибрацию при мачтовом расположении прицела специалисты фирмы Me Donnell Douglas предложили особую технику стабилизации линии визирования, получившую названия "мягкой привязки", заключающейся в том, что аппаратура подвешена на платформе, ось которой опирается на шаровой подшипник, который в свою очередь опирается на пружины, закрепленные на горизонтальной оси двухосевого кардана. В состав такого прицела входит система стабилизации линии визирования, включающая в себя: стойку, горизонтальный и вертикальный карданы, которые наводятся двигателями через редукторы по горизонту (±90o) и вертикали (±30o), и гибкий подвес. Гибкий подвес, на котором размещена аппаратура, содержит: шаровой подшипник, который опирается на пружины, прикрепленные к горизонтальной оси кардана; оптические датчики, измеряющие отклонение оси, на которой подвешены оптико-электронные приборы, от карданов; гироскопические датчики измерения положения подвеса в пространстве; два моментных двигателя, статоры (магниты крутящего момента) которых размещены на платформе гибкого подвеса, а роторы (лопасти) в карданном подвесе, которые обеспечивают разворот подвеса относительно карданов в пределах небольших углов (~ ±1o). Это является существенным недостатком прибора в целом, так как для обеспечения наведения в пределах больших углов в конструкцию прибора включены дополнительные двигатели. Применение двигателей для обеспечения перемещения карданов с целью получения больших углов наведения требует введения редукторов, которые привносят в контур стабилизации люфты, дополнительное трение и снижают жесткость кинематических цепей системы, следствием чего являются значительные ошибки сопровождения цели в диапазоне всех углов прокачки (порядка 3- 5'), что является недопустимым в контуре наведения ракеты. Кроме того, гибкий подвес требует высокой точности балансировки платформы с оптическими приборами на оси, что с одной стороны приводит к неоправданному увеличению габаритов и массы конструкции, с другой стороны малейший разбаланс (что наблюдается при изменении условий эксплуатации или изменения состава приборного оборудования) резко увеличивает ошибки стабилизации, а ошибки наведения ракеты достигают недопустимых величин. Следует также отметить, что конструкция гибкого подвеса в шаровом подшипнике требует сложной технологии изготовления как подшипника, так и пяты, которая опирается на подшипник, что приводит к значительной стоимости изготовления, в том числе и при массовом производстве.
Наиболее близким по своей сущности к изобретению является оптико-электронная система (ОЭС) комплекса Jernas [3], который и является прототипом предлагаемого изобретения.
Основным модулем комплекса является огневой блок, на котором размещены ЗУР и оптико-электронная система автоматического сопровождения цели и ракеты. Оптико-электронная система состоит из оптического прибора и передатчика команд с антенной. В состав оптического прибора входят: сферический корпус, в котором размещены тепловизионная камера с телеавтоматом сопровождения цели и ИК-пеленгатор захвата и пеленгации ракеты. Для обеспечения наведения по углу места сферический корпус подвешен на оси силового кардана, который через исполнительные механизмы (двигатель с редуктором) создает вращение в вертикальной плоскости. Сферический прибор совместно с силовым карданом размещен на погоне, который наводится по горизонту своими исполнительными механизмами. Подвес оптических элементов (тепловизионной камеры, ИК-пеленгатора) внутри сферы осуществлен на оси, установленной в шаровом подшипнике, и стабилизируется моментными двигателями и подвесными пружинами по сигналам с оптических и гироскопических датчиков в небольших углах отклонения.
Антенна передачи команд на ракету в данной системе размещена на своем основании и установлена на корпусе боевого модуля. По вертикали антенна управляется своим автономным приводом. По горизонту антенна вращается совместно с корпусом боевого модуля. Как уже отмечалось выше, такая конструкция оптического прибора не обеспечивает необходимые точности в условиях больших углов наведения. Применение такой системы в условиях подвижного наземного носителя (например, типа танк или БМП) становится также невозможным, так как такая система стабилизации не способна отработать как возмущения, возникающие от работы дизельного двигателя ввиду близости этих частот к резонансным частотам подвески (частота вибраций корпуса носителя от работы дизеля достигает 40 Гц и амплитудой до 1 мрад), так и возмущения, возникающие при работе в движении (диапазон частот до 3 Гц и амплитудой до 6o).
Кроме того, сферическая конструкция прибора не позволяет разместить антенну передатчика команд на его корпусе, так как приводит к разбалансировке прибора и снижению точностных и динамических характеристик прибора. А автономное, раздельное от прибора, размещение антенны привело к необходимости введения дополнительных приводов, элементов конструкции и как следствие увеличению массогабаритных характеристик системы управления в целом.
Таким образом, существующая оптико-электронная система не обеспечивает эффективную работу комплекса при больших углах наведения и в движении, за счет снижения точности наведения ракеты и наряду с этим имеет большие массогабаритные характеристики.
Задачей предлагаемого изобретения является повышение эффективности комплекса за счет повышения точности сопровождения цели и ракеты в широком диапазоне углов наведения при одновременном снижении массогабаритных характеристик оптико-электронной системы управления.
Это достигается тем, что в оптико-электронной системе зенитного ракетного комплекса, содержащей оптический пост, состоящий из несущей стойки, основания с поддоном и приводов с исполнительными механизмами наведения по вертикали и горизонту и блоком управления, тепловизионный прибор, выход которого соединен со входом телеавтомата, инфракрасный (ИК) пеленгатор, состоящий из оптико-электронного датчика и блока выделения координат, передатчик команд, соединенный с антенной, подвижной и неподвижными ветвями волноводной системы и волноводными вращающимися переходами в вертикальной и горизонтальной плоскостях, гироскопический датчик углов и кабельные сборки с герметичными выходами к разъемам, исполнительные механизмы приводов наведения оптического поста выполнены на бесконтактных моментных двигателях, статор первого из которых закреплен внутри стойки с возможностью вращения ротора с валом для наведения в вертикальной плоскости, а статор второго моментного двигателя закреплен внутри основания с возможностью вращения ротора с валом для наведения в горизонтальной плоскости, при этом оптический пост снабжен высокоточным подшипником, на неподвижной части которого смонтировано основание, а в подвижной части указанного подшипника закреплен вал ротора моментного двигателя горизонтального наведения, а в валу ротора моментного двигателя вертикального наведения с торцов выполнены фланцы, на которые установлены оптико-электронный датчик ИК-пеленгатора и тепловизионный прибор, к внешней горизонтальной плоскости которого жестко прикреплен гироскопический датчик углов, при этом между оптико-электронным датчиком и тепловизионным прибором к валу ротора моментного двигателя вертикального наведения закреплена антенна, причем валы выполнены пустотелыми и внутри них соответственно проложены ветви волноводной системы с вращающимися переходами и кабельные сборки, которые на выходе из пустотелых валов собраны в спиральные жгуты, через которые выходы блока управления соединены со статорными обмотками моментных двигателей, а выход телеавтомата и выход гироскопического датчика углов подключены к входу управления, причем выход оптико-электронного датчика ИК-пеленгатора подключен ко входу передатчика, при этом жгуты, вращающиеся в вертикальной плоскости, уложены во фланцевых переходах вала ротора моментного двигателя вертикального наведения, а жгуты, вращающиеся в горизонтальной плоскости, уложены в поддоне основания, который выполнен из материала с малым коэффициентом трения, причем в вале ротора моментного двигателя вертикального наведения выполнен паз, в котором зафиксирована подвижная ветвь волноводной системы.
Сущность изобретения заключается в том, что произведено определенным образом размещение известных систем тепловизионного прибора на одном валу: с торцов на фланцах вала установлены соответственно оптико-электронный датчик ИК-пеленгатора и тепловизионный прибор, а по центру между ними закреплена антенна передачи команд, причем исполнительные механизмы приводов наведения оптического поста выполнены на бесконтактных моментных двигателях, так что статор первого из них закреплен внутри стойки с возможностью вращения ротора с валом для наведения оптического поста в вертикальной плоскости, а статор второго - закреплен внутри основания с возможностью вращения ротора с валом для наведения оптического поста в горизонтальной плоскости.
Такое построение ОЭС позволяет обеспечить управление пространственным положением поля зрения в широких пределах по азимуту ±90 и по углу места от -15 до 87o с высокой точностью.
Установка гироскопического датчика углов на корпусе тепловизионного прибора обеспечивает измерение возмущений, возникающих при движении носителя, непосредственно на приборе и выдачу на моментные двигатели сигналов управления, пропорциональных этим возмущениям. Это обеспечивает высокую точность сопровождения цели и наведения ракеты и позволяет повысить вероятность попадания ракеты в цель при работе в движении.
Применение бесконтактных моментных двигателей в качестве исполнительных механизмов позволило отказаться от редукторов и тем самым исключить влияние жесткости, трения и люфтов этих механизмов на динамические параметры приводов и точностные характеристики сопровождения целей телеавтоматом и пеленгации ЗУР ИК- пеленгатором. Кроме того, приводы с бесконтактными моментными двигателями обладают значительной перегрузочной способностью за счет отсутствия щеточно-коллекторного узла, применения магнитов из редкоземельных материалов, не боящихся размагничивания, и обращенной конструкции. Это обеспечило отвод тепла элементами конструкции, крепящих моментный двигатель к корпусу, и позволило наряду с высокими динамическими параметрами (располагаемая скорость не менее 160o/с и ускорение до 600o/с2) создать малогабаритный оптический пост.
Введение в состав оптического поста высокоточного подшипника (в отличие от прототипа, имеющего шаровой подшипник и подвесные пружины), на неподвижной части которого смонтировано основание и в подвижной его части закреплен вал ротора моментного двигателя горизонтального наведения, позволило в составе иметь по одному исполнительному механизму по каждой оси (в отличие от прототипа, у которого по два исполнительных механизма по каждой оси), исключить влияние балансировки на точность и обеспечить высокую точность сопровождения цели и наведения ракеты в широком диапазоне углов прокачки при работе как с места, так и в движении. Выполнение валов двигателей пустотелыми и прокладка внутри них ветвей волноводной системы с вращающимися переходами и кабельных сборок, которые одновременно собраны в спиральные жгуты и уложены во фланцевых переходах и в поддоне, выполненном из материала с малым коэффициентом трения, а также фиксирование подвижной ветви волноводной системы в пазу вала вертикального наведения позволило обеспечить не только надежную передачу электрических сигналов из вращающихся блоков в невращающиеся в диапазоне широких углов прокачки во всех условиях эксплуатации и высокую точность наведения за счет минимизации момента трения, сведением его практически до нулевого значения, но и снизить массу и габариты оптического поста, исключив из конструкции дополнительные элементы, связанные с прокладкой кабельных сборок, передачей сигналов через вращающиеся контактные устройства и их защитой от внешних воздействий.
Реализация всей совокупности указанных технических решений позволила создать высокоточную малогабаритную оптико-электронную систему управления для зенитного ракетного комплекса.
Сравнение указанного технического решения с прототипом позволяет установить его соответствие критерию "новизна".
Сравнение заявленного технического решения с другими техническими решениями в данном классе МКИ не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерия "изобретательский уровень".
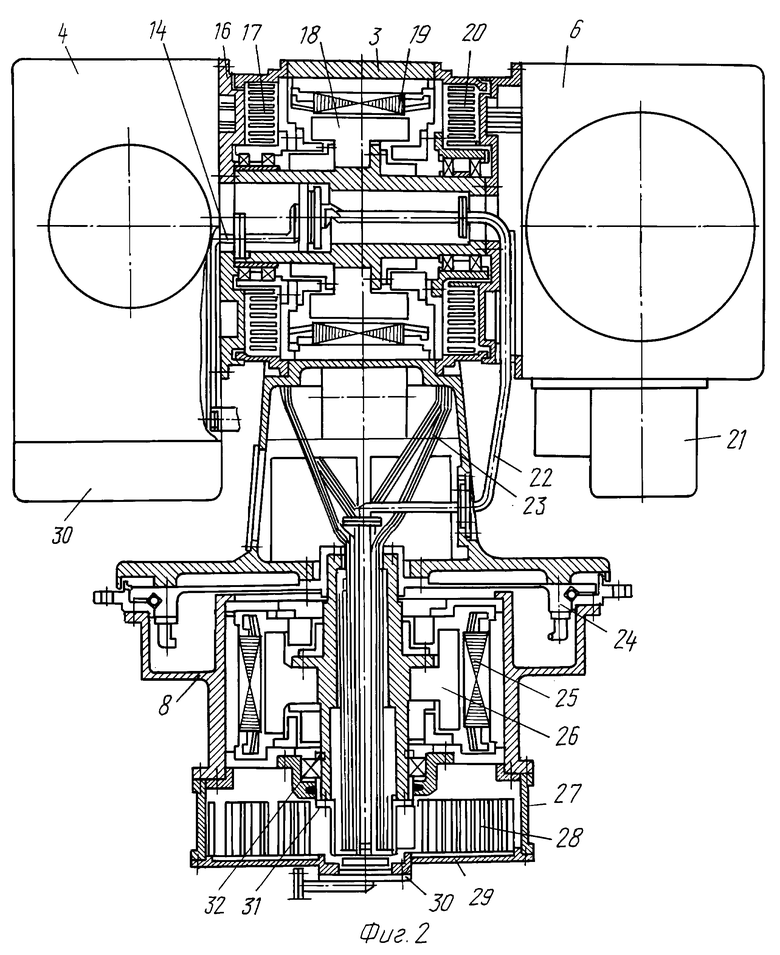
Изобретение поясняется графическим материалом, приведенным на фиг. 1 и фиг. 2, на которых представлен общий вид и состав ОЭС, вид оптического поста ОЭС в разрезе.
На фиг. 1 и фиг. 2 приняты следующие обозначения:
1 - оптический пост;
2 - бесконтактный моментный двигатель горизонтального наведения (МДГН);
3 - несущая стойка (корпус);
4 - оптико-электронный датчик (ОЭД) инфракрасного пеленгатора;
5 - бесконтактный моментный двигатель вертикального наведения (МДВН);
6 - тепловизионный прибор (ТПВП);
7 - телевизионный автомат (ТА);
8 - основание оптического поста;
9 - блок выделения команд (БВК) инфракрасного пеленгатора;
10 - блок управления (БУ) приводов наведения оптического поста;
11 - выходные герметичные разъемы;
12 - передатчик команд на ракету;
13 - неподвижная ветвь волноводной системы;
14 - подвижная ветвь волноводной системы;
15 - антенна передатчика команд;
16 - вал ротора моментного двигателя вертикального наведения с фланцами;
17 - жгут спиральный правый по вертикальному наведению;
18 - ротор моментного двигателя вертикального наведения;
19 - статор моментного двигателя вертикального наведения;
20 - жгут спиральный левый по вертикальному наведению;
21 - гироскопический датчик углов (ГДУ);
22 - неподвижная ветвь волноводной системы;
23 - жгуты внутренние;
24 - высокоточный подшипник оптического поста;
25 - статор моментного двигателя горизонтального наведения;
26 - ротор моментного двигателя горизонтального наведения;
27 - корпус для жгута спирального по горизонтальному наведению и размещения выходных разъемов (11);
28 - жгут спиральный по горизонтальному наведению;
29 - поддон с малым коэффициентом трения для жгута;
30 - вращающийся волноводный переход (сочленение);
31 - вал ротора моментного двигателя горизонтального наведения;
32 - поддерживающий подшипник.
Оптический пост представляет собой конструктивно законченный оптико-электронный прибор, содержащий стойку и основание, на которых размещены оптико-электронные приборы и антенна передатчика команд с волноводной системой и моментные двигатели. Так на валу ротора МДВН через фланцевые переходы установлены ОЭД ИК-пеленгатора (справа по ходу движения) и ТПВП (слева). На элементах стойки через промежуточный кронштейн между ОЭД и ТПВП закреплена антенна передатчика команд с подвижной ветвью волноводной системы, которая зафиксирована в пазу вала ротора МДВН.
Во фланцевых переходах вала МДВН смонтированы подвижные спиральные плоские кабельные сборки, обеспечивающие поворот системы в вертикальной плоскости в пределах рабочих углов от минус 15 до 85o.
Вал ротора МДГН, размещенного в основании, закреплен в подвижной по горизонтальной плоскости части высокоточного подшипника. Статор этого МДГН неподвижно закреплен в основании, которое соответственно закреплено на неподвижной части высокоточного подшипника. Высокоточный подшипник представляет собой сборку, состоящую из подвижной внутренней и неподвижной наружной частей. Во внутреннюю полость, образованную внешним и двумя внутренними кольцами засыпаются калиброванные с точностью до 2 мкм стальные шары диаметром 10 мм с соответствующей смазкой. Кольца изготовлены из специальной стали с высокой точностью обработки и шероховатости беговых дорожек с торцевыми биениями не более 0,01 мм. Люфт в подшипнике выбирается регулировочными кольцами, которые закладываются в промежуток между верхним и нижним внутренним кольцом подшипника.
Бесконтактные моментные двигатели (МД) горизонтального и вертикального наведения идентичны и представляют собой каждый синхронную электрическую машину, замкнутую по положению ротора. Ротор выполнен на постоянном магните. С ротором соединен датчик положения ротора типа синусно-косинусного вращающегося трансформатора, с которого сигнал подается на фазные обмотки статора МД, ток которых в зависимости от входного сигнала создает магнитодвижущие силы, вызывающие вращение ротора. При этом взаимное положение ротора МД и датчика угла выбрано так, чтобы создать максимальный вращающий момент (θ= 90o) и при разнополярных входных сигналах, одинаковых по амплитуде, соблюдалось равенство угловых скоростей при правом и левом вращении. Частота вращения МД пропорциональна амплитуде входного сигнала.
Валы роторов МДВН и МДГН выполнены пустотелыми и в них проложены кабельные сборки, подвижные, неподвижные ветви и вращающиеся переходы волноводной системы.
Гироскопический датчик углов (ГДУ) представляет собой трехстепенной гироскопический прибор, который жестко закреплен своим корпусом на тепловизионном приборе и измеряет отклонения ТПВП от вертикальной оси по двум плоскостям в широкой полосе частот. ГДУ является непосредственным датчиком сигналов для наведения и стабилизации. Погрешность измерения углов не превышает 0,05 Мрад. ГДУ обладает широким динамическим диапазоном и измеряет скорости от 0 до 60o/с.
Тепловизионный прибор (типа 1ПН80) работает в диапазоне 8-14 мкм и имеет на выходе стандартный телевизионный видеосигнал, который поступает на вход телеавтомата (ТА).
Телеавтомат (типа 1ТТС1) представляет собой быстродействующую специализированную вычислительную систему, реализующую корреляционно-контрастный алгоритм обработки и определения координат цели относительно центра тепловизионного растра видеосигнала с использованием запомненного образа цели и ее текущего изображения на основании видеосигнала, принимаемого с ТПВП
Инфракрасный пеленгатор (типа 1ИКП1) автоматически измеряет координаты ЗУР, имеет в составе оптико-электронный датчик, представляющий собой систему с растровым анализатором, фотоприемником и усилителем фототока и координатор, который выделяет координаты ЗУР - соответственно угол места и азимут по сигналам фотоприемного устройства, реагирующего на световой сигнал, создаваемый источником излучения ракеты (например, стартовым двигателем на стартовом участке полета ЗУР и лампой-фарой на маршевом участке).
Передатчик команд с антенной обеспечивает кодирование и передачу команд на борт ЗУР.
Плоский спиральный жгут, передающий сигналы из вращающейся части по горизонту в неподвижную часть уложен в поддон основания, поддон выполнен из фторопласта и обеспечивает поворот оптического поста в пределах углов ±90o практически без трения.
Электронные блоки, а именно: телеавтомат, передатчик команд, блок управления приводов и блок выделения координат ИК-пеленгатора размещены вне оптического поста и не создают нагрузку на приводы поста.
Функционирование оптико-электронной системы по предлагаемому изобретению происходит следующим образом.
После обнаружения цели в ТПВП видеосигнал с ТПВП поступает на вход телеавтомата, в котором он обрабатывается, и определяются координаты цели относительно центра тепловизионного растра. Одновременно измеряется с помощью ГДУ отклонение ТПВП и жестко с ним связанных ОЭД и антенны передачи команд (так как они закреплены на одной оси) от горизонтальной плоскости. Сигнал управления с ГДУ и координата цели, измеренная телеавтоматом, подаются на вход блока управления приводов наведения оптического поста. С выхода блока управления сигналы через гибкие спиральные жгуты передаются в статорные обмотки моментных двигателей, создавая магнитодвижущие силы, которые вызывают вращение роторов с пустотелыми валами. Это вращение компенсирует рассогласование между положением цели в ТВ растре и центром растра и обеспечивается сопровождение цели.
Если цель в зоне ЗУР, то принимается решение о пуске ЗУР, после схода она пеленгуется ОЭД ИК-пеленгатора и сигнал рассогласования между целью и ракетой передается в передатчик, с которого высокочастотный сигнал через волноводную систему, содержащую подвижные и неподвижные ветви и вращающиеся переходы, передается на антенну. Антенна передает команды управления на ракету до совмещения ее с целью.
Предлагаемая ОЭС обеспечивает высокую эффективность за счет отработки с высокой точностью при наведении ракеты:
- параметров движения цели, т.е. угловой скорости линии визирования. Для современных целей такие скорости достигают 60o/с;
- параметров возмущений от движения носителя и вибрации от работы тягового двигателя. Для носителей типа танк, БМП такие возмущения составляют до 30o/с и вибрации в полосе до 25-40 Гц. Это стало возможным потому, что предлагаемая конструкция обеспечивает малый момент сухого трения, малый статический дисбаланс, минимальную жесткость жгутов и волноводной системы. Этого удалось достичь благодаря тому, что в предложенной ОЭС выбраны в качестве приводов бескорпусные моментные двигатели, размещенные определенным образом в конструкции, а валы роторов этих двигателей выполнены пустотелыми и в них проложены кабельные сборки и волноводные переходы. Это обеспечило отсутствие редукторных передач и тем самым исключило влияние таких параметров, как недостаточная жесткость кинематической передачи и люфтов. Жесткость кинематической передачи увеличилась в сотни раз и благодаря этому возросла собственная частота колебаний (резонансные частоты) и составила не менее 150 Гц. Это позволило отрабатывать с высокой точностью возмущения в широкой полосе частот, в том числе и при движении самохода.
Кроме того, исполнение жгутов в виде спиральных сборок и укладка жгута ГН в поддоне, выполненном из фторопласта, обеспечили минимальную жесткость и трение кабелей о корпус при передаче электрических сигналов в широком диапазоне углов прокачки оптического поста вокруг вертикальной (-15...85o) и горизонтальной (±90o) осей.
Размещение на одной оси оптических приборов, антенны передачи команд и ГДУ на ТПВП повысило точность согласования осей всех приборов между собой, обеспечило измерение колебаний непосредственно поля зрения ТПВП и повысило точность измерения координат цели, что обеспечило высокую точность при работе в движении, а также позволило создать прибор с углами прокачки в широком диапазоне при минимальных объемах и массе. Масса поста не превышает 120 кг. Предлагаемая ОЭС обеспечивает высокие точности: погрешность сопровождения цели не превышает 0,1 мрад, а среднеквадратическая ошибка наведения ЗУР не превышает 2 м при работе как с места, так и в движении, что обеспечивает вероятность поражения цели типа F-16 не менее 0,75. Таким образом, в предлагаемой оптико-электронной системе реализуется высокая эффективность комплекса за счет повышения точности сопровождения цели и ракеты в широком диапазоне углов наведения при работе как с места, так и в движении, при одновременном снижении массо-габаритных характеристик оптико-электронной системы управления.
По настоящему предложению разработана конструкторская документация при создании комплекса "Панцирь-С", изготовлен экспериментальный образец, который находится на полевых испытаниях. Предлагаемое изобретение может быть применено при модернизации комплекса "Тунгуска М1", а также при создании морского варианта комплекса "Панцирь-М" и упрощенных недорогих комплексов типа ТКБ-841 с оптической системой управления.
Источники информации
1. Flight International, 1984, 125, N 3903, p.515.
2. Interavia Air Letter, 1983, N 10311.
3. Jane's Land - Based air defense, Tenth Edition 1997-98, p.p. 293-297.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ И ОПТИКО-ЭЛЕКТРОННАЯ КОМАНДНАЯ СИСТЕМА НАВЕДЕНИЯ | 2005 |
|
RU2288424C1 |
| Оптический пост оптико-электронной системы комплекса вооружения | 2021 |
|
RU2767820C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ЮСТИРОВОЧНАЯ ВЫШКА | 2009 |
|
RU2406066C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1998 |
|
RU2141623C1 |
Изобретение относится к военной техники, в частности к зенитным ракетным комплексам ближнего рубежа с оптической системой управления и радиокомандным наведением ЗУР. Технический результат - повышение эффективности комплекса за счет повышения точности сопровождения цели и ракеты в широком диапазоне углов наведения при одновременном снижении массогабаритных характеристик оптико-электронной системы управления. Это достигается тем, что оптико-электронная система зенитного ракетного комплекса содержит оптический пост, состоящий из несущей стойки, основания с поддоном и приводов с исполнительными механизмами наведения по вертикали и горизонту и блоком управления, тепловизионный прибор с телеавтоматом, инфракрасный (ИК) пеленгатор, состоящий из оптико-электронного датчика и блока выделения координат. Система также содержит передатчик команд с антенной, подвижной и неподвижными ветвями волноводной системы и волноводными вращающимися переходами в вертикальной и горизонтальной плоскостях, гироскопический датчик углов и кабельные сборки с герметичными выходами к разъемам. Исполнительные механизмы приводов наведения оптического поста выполнены на бесконтактных моментных двигателях, статор первого из которых закреплен внутри стойки с возможностью вращения ротора с валом для наведения в вертикальной плоскости, а статор второго моментного двигателя закреплен внутри основания с возможностью вращения ротора с валом для наведения в горизонтальной плоскости. При этом в состав оптического поста введен высокоточный подшипник, на неподвижной части которого смонтировано основание, а в подвижной части подшипника закреплен вал ротора моментного двигателя горизонтального наведения. В валу ротора моментного двигателя вертикального наведения с торцов выполнены фланцы, на которые установлены оптико-электронный датчик ИК-пеленгатора и тепловизионный прибор, к горизонтальной плоскости которого жестко прикреплен гироскопический датчик углов. Между оптико-электронным датчиком и тепловизионным прибором к валу ротора моментного двигателя вертикального наведения закреплена антенна. Валы выполнены пустотелыми и внутри них соответственно проложены ветви волноводной системы с вращающимися переходами и кабельные сборки, которые на выходе из пустотелых валов собраны в спиральные плоские жгуты при этом жгуты, вращающиеся в вертикальной плоскости, уложены во фланцевых переходах вала ротора моментного двигателя вертикального наведения. Жгуты, вращающиеся в горизонтальной плоскости, уложены в поддоне основания, который выполнен из материала с малым коэффициентом трения, причем в вале ротора моментного двигателя вертикального наведения выполнен паз, в котором зафиксирована подвижная ветвь волноводной системы, соединенной с антенной. 2 ил.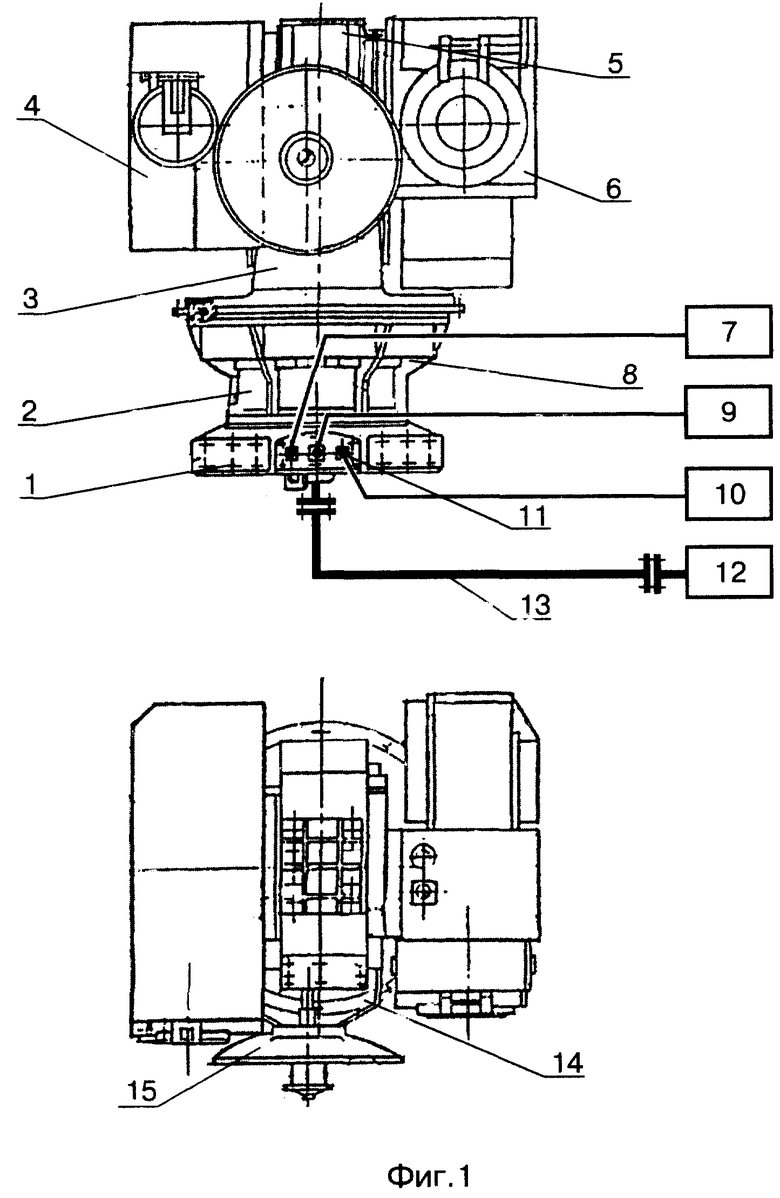
Оптико-электронная система зенитного ракетного комплекса, содержащая оптический пост, состоящий из несущей стойки, основания с поддоном и приводов с исполнительными механизмами наведения по вертикали и горизонту и блоком управления, тепловизионный прибор, выход которого соединен со входом телеавтомата, инфракрасный (ИК) пеленгатор, состоящий из оптико-электронного датчика и блока выделения координат, передатчик команд, соединенный с антенной, подвижной и неподвижными ветвями волноводной системы и волноводными вращающимися переходами в вертикальной и горизонтальной плоскостях, гироскопический датчик углов и кабельные сборки с герметичными выходами к разъемам, отличающаяся тем, что исполнительные механизмы приводов наведения оптического поста выполнены на бесконтактных моментных двигателях, статор первого из которых закреплен внутри стойки с возможностью вращения ротора с валом для наведения в вертикальной плоскости, а статор второго моментного двигателя закреплен внутри основания с возможностью вращения ротора с валом для наведения в горизонтальной плоскости, при этом оптический пост снабжен высокоточным подшипником, на неподвижной части которого смонтировано основание, а в подвижной части указанного подшипника закреплен вал ротора моментного двигателя горизонтального наведения, а в валу ротора моментного двигателя вертикального наведения с торцов выполнены фланцы, на которые установлены оптико-электронный датчик ИК-пеленгатора и тепловизионный прибор, к внешней горизонтальной плоскости которого жестко прикреплен гироскопический датчик углов, при этом между оптико-электронным датчиком и тепловизионным прибором к валу ротора моментного двигателя вертикального наведения закреплена антенна, причем валы выполнены пустотелыми и внутри них соответственно проложены ветви волноводной системы с вращающимися переходами и кабельные сборки, которые на выходе из пустотелых валов собраны в спиральные плоские жгуты, через которые выходы блока управления соединены со статорными обмотками моментных двигателей, а выход телеавтомата и выход гироскопического датчика углов подключены к входу блока управления, причем выход оптико-электронного датчика ИК-пеленгатора подключен ко входу передатчика, при этом жгуты, вращающиеся в вертикальной плоскости, уложены во фланцевых переходах вала ротора моментного двигателя вертикального наведения, а жгуты, вращающиеся в горизонтальной плоскости, уложены в поддоне основания, который выполнен из материала с малым коэффициентом трения, причем в вале ротора моментного двигателя вертикального наведения выполнен паз, в котором зафиксирована подвижная ветвь волноводной системы.
| JANE'S LAND-BASED AIR DEFENSE, TENTH EDITION, 1997-98, pp | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДАЧИ УГЛЯ В ТЕНДЕР ПАРОВОЗА | 1920 |
|
SU293A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОСОПРОВОЖДЕНИЯ | 1993 |
|
RU2081383C1 |
| DE 3330495 Al, 21.03.1985 | |||
| КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2132794C1 |

