жестко закрепленными на нем роликами 9 и пружины 10, коромысло 11, шину 12 с упором и двумя кронштейнами, механический аккумулятор 13, выполненный пружинным, механизм 14 автоматического сцепления - расцепления аккумулятора со стопой, содержащий направляюш;ую трубку 15, шток 16, кронштейн 17, собачку 18, снабженную поперечным рычагом, и пружину 19. Кроме того, протез содержит буфер с гибкой тягой, выполненный в виде пружины 20 и жесткой тяги 21, и плюснофаланговый шарнир 22.
Протез нижней конечности работает следуюш;им образом.
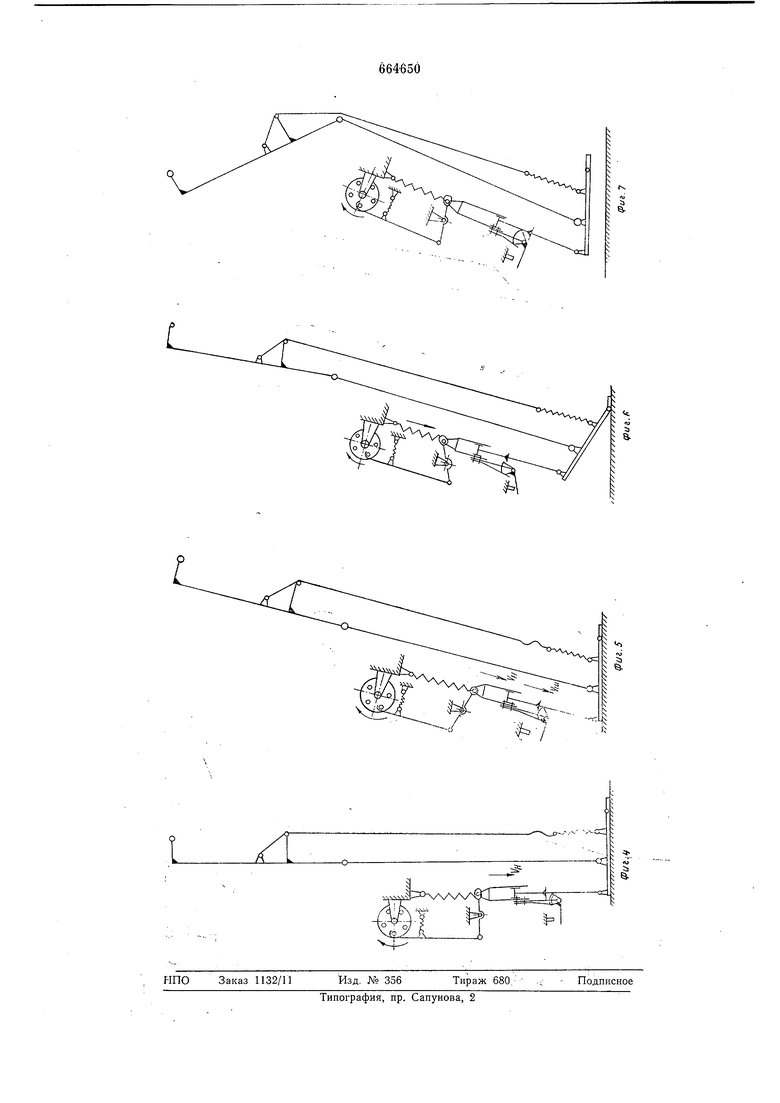
В начале опорного периода (фиг. 3) происходит перекат на пятке искусственной стопы 5 - осуществляется передний толчок, что соответствует первому режиму работы стопы. Привод 6 голеностопного шарнира сообщает вращение диску 8, имеюшему зкрепленные на нем ролики 9. Жесткая тяга 7, находящаяся в зацеплении с одним из роликов 9, через коромысло II заряжает механический аккумулятор 13.
Жесткая тяга 21 под действием изменения наклона стопы натягивается и обеспечивает подкосоустойчивость в коленном шарнире 2, а пружина 20 смягчает перекат на пятке стопы 5. Собачка 18 движется вдоль штока 16, не препятствуя перемещению его вдоль направляющей трубки 15.
Опускание всей стопы на опору соответствует одноопорной фазе или второму режиму работы стопы (фиг. 4). В эту фазу осуществляется перекат относительно голеностопного шарнира, что приводит к ослаблению жесткой тяги 21, продолжается процесс накопления энергии в аккумуляторе. Взаимное перемещение направляющей трубки 15 и штока 16 обеспечивает контакт собачки 18 и фаски штока 16, что приводит к сцеплению направляющей трубки и штока. Это определяет начало совместной работы силы тяжести инвалида и привода 6 по накоплению энергии в механическом аккумуляторе 13.
После заверщения переката относительно голеностопного шарнира 4 происходит отрыв пятки искусственной стопы 5 от опоры, что характеризует начало третьего режима работы (фиг. 5), при котором межзвенный голеностопный угол стабилизирован и дальнейший перекат происходит вокруг плюснефалангового шарнира 22. Механизм 14 автоматического сцепления - расцепления обеспечивает неподвижность штока 16 относительно направляющей трубки 15 посредством собачки 18. В конце рассматриваемой фазы жесткая тяга 7 выводится из зацепления с роликом 9 под воздействием набегающего смежного ролика.
Четвертый режим работы (фиг. 6) стопы характеризуется тем, что потенциальная энергия заряженной пружины переходит в
кинетическую энергию, направленную на осуществление резкого подошвенного сгибания стопы, обеспечивающего отталкивание от опоры и осуществление заднего толчка. При этом жесткая тяга 7 под действием пружины 10 сцепляется с набегающим смежным роликом. Процесс аккумулирования энергии возобновляется, протекая описанным образом. Жесткая тяга 21
ослаблена. При завершении подошвенного сгибания стопы и возвращении механического аккумулятора исходное положение поперечный рычаг собачки 18, наталкиваясь на упор шины, освобождает шток
16 от сцепления с направляюшей трубкой 15, что необходимо для последуюшего тыльного сгибания стопы.
После завершения заднего толчка и отрыва стопы протеза от опоры начинается
перенос протеза над опорой, что соответствует пятому режиму работы стопы (фиг. .7), во время которого происходит тыльное сгибание стопы с помощью жесткой тяги 21, натягивающейся при сгибании в коленном шарнире 2.
В результате такого выполнения протеза ходьба инвалида отличается симметричностью походки, а управление протезом требует небольшой затраты энергии.
Формула изобретения
Протез нижней конечности, содержащий искусственную стопу, голеностопный щарнир, гильзу голени, гильзу бедра и механический аккумулятор, отличающийся тем, что, с целью уменьщения энергозатрат и исключения асимметрии ходьбы, в нем установлены привод голеностопного шарнира, коромысло, шина с упором и двумя кронштейнами, механизм зарядки и периодической разрядки аккумулятора, буфер с гибкой тягой и механизм автоматического сцепления - расцепления аккумулятора со
стопой, причем механизм зарядки и периодической разрядки аккумулятора выполнен в виде жесткой тяги, соединенной с коромыслом, и диска с жестко закрепленными на нем роликами, остановленного на выходном валу привода, а механизм автоматического сцепления - расцепления содержит направляющую трубку, шток, кронштейн, собачку и пружину, причем жесткая тяга снабжена зубом, связанным с одним из роликов диска, а собачка снабжена поперечным рычагом и шарнирно установлена на кронштейне, неподвижно соединенном с направляющей трубкой, шарнирно соединенной с коромыслом.
Источники информации,
принятые во внимание при экспертизе 1. Гурфинкель В. С. Биодинамические принципы рационального построения голеноподкидных устройств в протезах бедра. -
Труды ЦНИИПП, 1949, № 8, с. 99-115,
XJ

| название | год | авторы | номер документа |
|---|---|---|---|
| Протез нижней конечности | 1984 |
|
SU1342493A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Протез бедра | 1961 |
|
SU146438A1 |
| Протез после вычленения бедра | 1985 |
|
SU1296148A1 |
| Протез бедра | 1984 |
|
SU1237204A1 |
| Искусственная стопа | 1979 |
|
SU848023A1 |
| Протез нижней конечности | 1984 |
|
SU1319845A1 |
| Протез бедра | 1991 |
|
SU1801416A1 |
| Протез бедра со вставной рычажной системой | 1954 |
|
SU99697A1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |