тактильные датчики 23 и 2А, подклю- чс иные к блоку 25 формирования манд. Жесткость пружины подбирается из условия обеспечения надежности возврата протеза в исходное состояние при завершении фазы переноса и
1
Изобретение относится к медицине, а именно к протезированию и протезо- строению, и касается протезов нижних конечностей.
Целью изобретения является улучшение функциональных характеристик протеза и снижение энергозатрат инвалида при ходьбе.
На фиг. 1 изображена кинематическая схема протеза нижней конечности на фиг. 2 - кинематическая схема гидроцилиндра и распределительных устройств; на фиг. 3 и 4 - схема блока формирования команд, варианты.
Протез нижней конечности содержит последовательно соединенные искусственную стопу 1, голеностопный шарнир
2и трубку голениi, выполненную в вид телескопического звена, содержащего установленные по оси голени цилиндр
3и поршень 4, причем цилиндр 3 соединён с приемной гильзой 5, механи- ческий аккумулятор 6, выполненньш в виде пружины и соединенный посредст вом механизма 7 автоматического сцепления-расцепления , гидравлический цилиндр 8, смежные полости которого соединяются посредством трубопровода 9, обратного клапана 10 и золотникового распределителя 11, связанного с электромагнитом 12; электромеханический замок 13, включаюш,ий тягу 14, направляющую втулку 15, собачку 16, соединенную посредством рычага
17 с сердечником электромат нита 18 и с пружинами 19.
Механизм протеза включает также регулировочный палец 20, связанный посредством коромысла с поршнем 21 гидроцилиндра 8, в полости которого установлена пружина 22. На пятке и на носке стопы 1 установлены тактильные датчики 23 и 24, подключенные соответственно к блоку 25 формирования
значительно меньше жесткости пружинного аккумулятора 6. Наличие пальца 20 обеспечивает возможность регулировки начального состояния аккумулятора 6 в зависимости от массы инвалида. 4 ил.
команд, который содержит два анало-. гичных канала (фи-г, 3) из последовательно соединенных схем 26 задержки и формирователей 27, выходы которых подключены к электромагнитам 12 и 18 соответственно. Формирователи 27 выполнены, например, в виде одновиб- раторов, соединенных с усилителями
мощности.
Протез нижней конечности работает следующим образом.
В исходном состоянии, которое соответствует моменту,предшествующему
фазе переднего, толчка, обмотки электромагнитов 12 и 18 обесточены, поршень телескопического звена максимально выдвинут относительно цилиндра 3, механический, например пружинный, аккумулятор 6 разряжен до чального значения, регулируемого положением пальца 20, собачка 16 находится в зацеплении с тягой 14, смежные полости гидроцилиндра 8 соединены через обратньш клапан 10, что обеспечивает возможность однонаправ- , ленного движения поршня 4 относитель- .но цилиндра 3 телескопического звена. При этом механизм 7 находится в состоянии расцепления и не препятствует перемещению цилиндра 3 совместно с тягой 14 вниз.
В начале опорног.о периода происходит перекат на пятке искусственной
стопы. Осуществляется передний толчок. При этом сигнал (фиг. 4) с пяточного тактильного датчика 24 поступает в первый канал блока 25 формирования команд, в схему 26 задержки.
в это же время под действием сжимающей силы, возникающей при взаимодействий силы веса и силы инерции массы инвалида с опорой, цилиндр 3 начинает перемещаться вниз относителько поршня 4 телескопического звена и через собачку 16, жестко связанную с цилиндром 3, и тягу 14 растягивает пружину механического аккумулятора 6. Этим обеспечивается амортизация переднего толчка и частичный заряд механического (пружинного) ак- кумулятора 6. При этом осуществляется укорочение протеза.
Опускание всей стопы 1 на опору соответствует одноопорной фазе движения. В этой фазе под действием силы веса инвалида происходит дальнейшее опускание цилиндра 3 относительно поршня 4 и заряд механического (пружинного) аккумулятора 6. К моменту отрыва пятки от опоры механический аккумулятор 6 находится в полностью заряженном состоянии. Кроме того, в заряженном состоянии находится пружина 22. Механизм 7 к этому моменту переходит в состояние зацепления и обеспечивает возможность передачи усилия от механического аккумулятора 6 через тягу 14 к стопе.
Схема 26 задержки индивидуально настроена так, что срабатывание ее происходит после завершения одноопорной фазы. Сигнал через формирователь 27 импульсов передается на обмотку электромагнита 18.
Электромагнит 18 срабатывает и через рычаг 17 выводит собачку 16 из зацепления с тягой 14. При этом механический (пружинный) аккумулятор 6 начинает возвращаться в исходное состояние и через тягу 14 и механизм 7 автоматического сцепления-расцепления осуществляет подошвенное сгибание стопы 1, т.е. потенциальная энергия заряженной пружины 6 переходит в кинетическую энергию, направленную на осуществление подошвенного сгибания стопы 1, обеспечивающего отталкивание от опоры - задний толчок.
Для уменьшения тяговой силы электромагнита 18 плоскость взаимодействия собачки 16 с тягой 14 выполнена под небольшим углом, обеспечивающим наличие нормальной (перпендикулярной силе тяги) составляющей силы, которая уравновешивается пружиной 19 при максимальном растяжении пружинного аккумулятора 6.
В опорной фазе гидроцилиндр 8 совместно с распределительными устройствами (клапаном 10 и золотниковым распределителем 11) обеспечивает одно0
0
направленное перемещение цилиндра 3 относительно поршня 4, что устраняет возможность колебательного движения телескопического звена.
После завершения фазы заднего толчка срабатывает датчик 24 командного сигнала, установленный на носке стопы, и сигнал поступает в схему 26 задержки второго канала блока 25 формирования команд. После отрыва стопы 1 начинается перенос протеза над опорой.
Схема 26 задержки второго канала
g .настроена так, что срабатывание ее происходит в середине фазы переноса. Сигнал через формирователь 27 посту- пает на обмотку электромагнита 12, который, срабатывая, подключает золотниковый распределитель 11, откры-. вающий магистраль, соединяющую напрямую смежные полости гидроцилиндра 8.
Под действием пружины 22 и инерционных сил поршень 4 перемещается вниз
5 относительно цилиндра 3, а собачка 16 входит в зацепление с тягой 14, и протез приходит в исходное состояние. Далее процесс повторяется.
Аналогично работает механизм протеза, если управление осуществляется от биоэлектрических сигналов. В этом случае в завершающую фазу опоры инвалид сокращает, например, икройожную мьш1цу культи голени. Управляющий сигнал через электроды 28, 29 по (фиг.4)
5 первому каналу блока 25 формирования команд, а именно через усилитель 30 биопотенциалов, интегратор 31 и формирователь 32 импульсов, поступает на обмотку электромагнита 18. Далее работа механизма в фазу опоры происходит как описано.
0
Б середине фазы переноса инвалид сокращает переднюю большеберцовую
45 мышцу культи голени. Управляющий сигнал аналогично через второй канал блока 25 формирования команд передается на обмотку электромагнита 12. Далее работа механизма в фазу перено5Q са происходит как описано. В случае управления от биосигналов роль командных датчиков выполняют электроды, установленные на мышцах.
Длина протезированной конечности
gg в исходном состоянии выбирается равной или несколько большей длины сохранившейся конечности, а жесткость механического (пружинного) аккумулятора 6 совместно с пружиной 22 вы
51
бирается так, чтобы обеспечить ра- венство длин протезированной и сохранившейся конечности при стоянии, т.е при нагрузке на протез, равной половине массы инвалида. При этом общая жесткость протеза при сжатии определяется суммарной жесткостью аккумулятора 6 и пружины 22. Жесткость пружины 22 подбирается из условия обеспечения надежности возврата протеза в исходное состояние при завершении фазы переноса и значительно меньше жесткости пружинного аккумулятора 6, Наличие, пальца 20 обеспечивает возможность регулировки начального состояния механического (пружинного) аккумулятора 6 в зависимости от массы инвалида.
При необходимости блок 25 формирования команд можно отключить. В таком случае -обмотки электромагнитов 12 и 18 находятся в обесточенном состояния, что позволяет в фазе опоры обеспечить укорочение протеза, и дальнейшая ходьба происходит как на обычном протезе с длиной протезированной конечности несколько меньше (в зависимости от обш,ей жесткости протеза), чем сохранившаяся.
рмула изобретения
Ф о
Протез нижней конечности, содержащий последовательно соединенные искусственную стопу, голеностопный шарнир, трубку голени и приемную гильзу, а также механический.аккумулятор, соединенный посредством механизма автоматического сцепления-расцепления . со стопой, отличаю- щ и и .с я тем, что, с целью снижения энергозатрат инвалида при ходьбе, в : нем на оси голени установлен гидро- с цилиндр, связанный с трубкой голени, выполненной в виде телескопического . звена, поршень гидроцилиндра шарнир- но связан с регулировочным пальцем механического аккумулятора, соединенным с поршнем телескопического звена трубки голени, распределитель- ньш элемент гидроцилиндра соединен с первым электромагнитом, а электромеханический замок посредством собачки связан с вторым электромагнитом, при этом первьи и второй электромагниты подключены к блоку формирования команд, связанному с датчиками командных сигналов.
0
5


| название | год | авторы | номер документа |
|---|---|---|---|
| Протез нижней конечности | 1977 |
|
SU664650A1 |
| Протез нижней конечности | 1982 |
|
SU1026802A1 |
| ПРОТЕЗ ГОЛЕНОСТОПНОЙ ЧАСТИ НОГИ | 1999 |
|
RU2153308C1 |
| Протез бедра | 1982 |
|
SU1074522A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| Протез бедра | 1986 |
|
SU1351600A1 |
| Протез бедра с управляемым коленным шарниром | 1985 |
|
SU1357019A1 |
| Протез после вычленения бедра | 1985 |
|
SU1296148A1 |

Изобретение относится к медицинской технике. Цель изобретения - снижение энергозатрат инвалида при ходьбе. Протез содержит искусственную стопу 1, голеностопный шарнир 2 и трубку голени. Цилиндр 3 соединен с приемной гильзой 5.Регулировочный палец 20 связан посредством коромысла с поршнем 21 гидроцилиндра 8. На пятке и на носке етопы 1 установлены (Л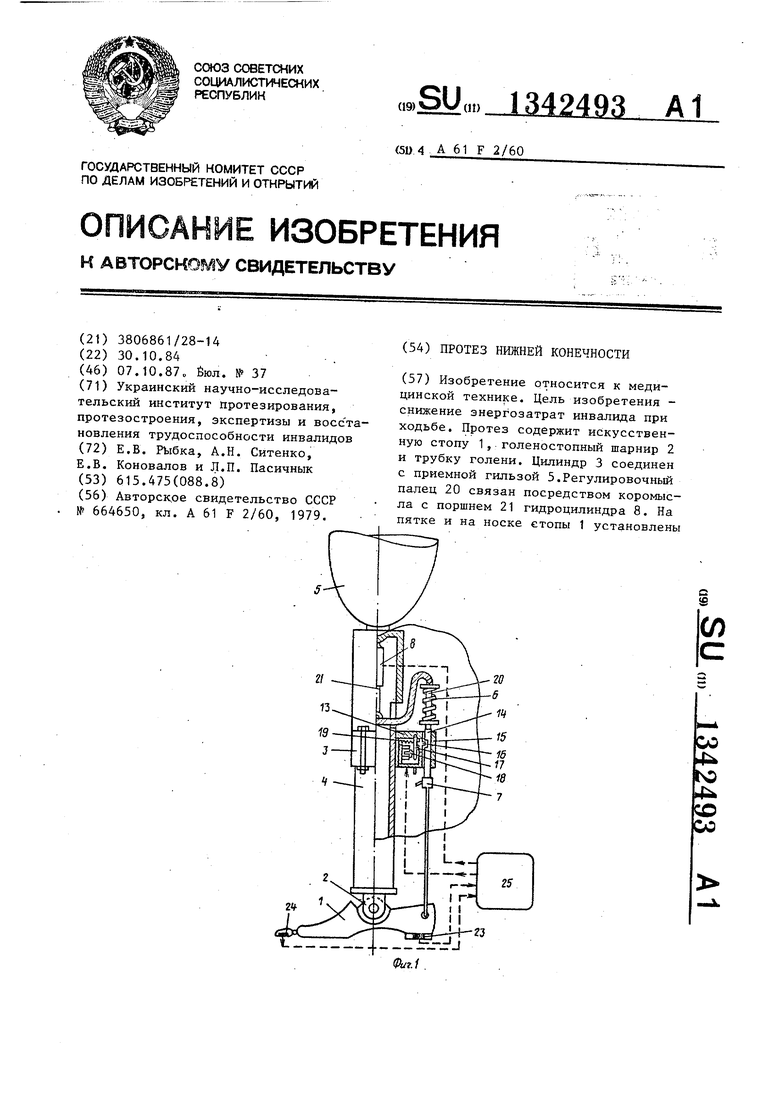
Редактор И. Николайчук
Заказ 4539/3Тираж 594Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Составитель В. Ваганов
Техред Л.Сердюкова, Корректоре. Черни
| Протез нижней конечности | 1977 |
|
SU664650A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
