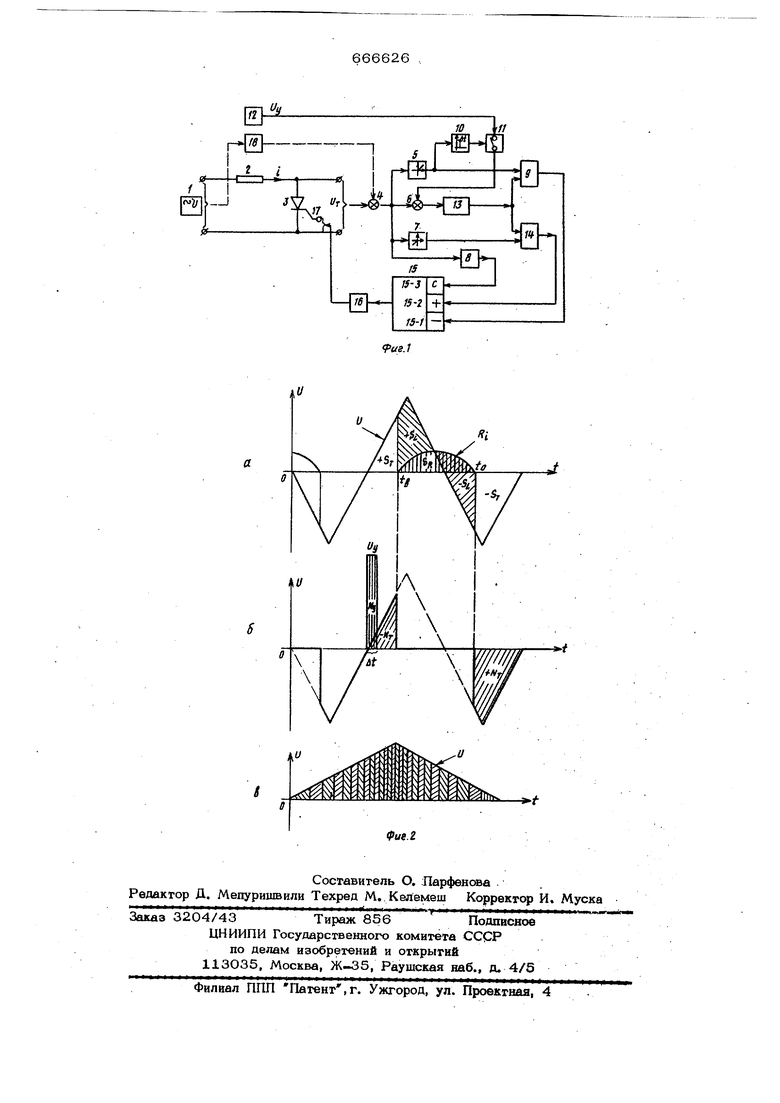
непрерьгоных токов без параметрической пристыковки этих двух зон. Наиболее близким по технической сущности к данному изобретению является способ цифрового (дискретного) управления тиристорным преобразователем 2 , заключающийся в том,что преобразуют управляющий сигнал.в число импульсов, запоминают это число импульсов, преобразуют эталонное постоянное напряжение в импульсы тактовой высокой частоты, ведут счет импульсов тактовой высокой постоянной частоты, сравнивают число этих импульсов с числом импульсов, соответствующих управляющему сигналу, и в момент равенства sTitx двух чисел вырабатывают управляющий сигнал, постоянный По фазе, подают этот сигнал на тиристоры преобразователя и получают, среднее значение напряжения на нагрузке. Недостатком данного, способа является то, что среднее значение напряжения на нагрузке зависит от формы напряжения питающей сети -и от параметров нагрузки, который вызван неизменностью фазы переднего фронта управляющего сигнала при постоянстве управляющего сигнала. В результате этого изменение кривой напряжения, питающей сети (при данном управляющем сигнале) приводит к измененшо среднего значения напряжения на нагрузке. Аналогичное влияние на среднее значение на нагрузке оказывают, как известно, параметры нагрузки в режиме прерьшистых токов (влияние ЭДС самоиндукпии нагрузки). Цель изобретения - получение среднего значения напряжения на нагрузке, не- зависимо от формы напрялсения питающей сети и от параметров нагрузки. Поставленная цель достигается тем, что в способе цифрового управления тиристорным преобразователем, заключающемся в том, что преобразуют постоянное эталонное напряжение в базовое число им пульсов, запоминают это число, преобразу ют управляющее напряжение в текущее число .импульсов сравнивают базовое число с текущим числом имлульсов, сротвег- ствующих управляющему напряжению, формируют импу.чьсы управления тиристоров в момент равенства этих чисел и получают среднее значение напряжения на нагрузке, также преобразуют отрицательное значение напряжения на тиристоре в базовое число импульсов переменной высокой частоты, отделяющих под кривой напряжения на тиристоре участки, равные между собой по площади, преобразуют сумму мгновенного значения положительного напряжения на тиристоре и управляющего напряжения, поданного на заданный интервал времени, в текущее число импульсов переменной высокой тактовой частоты, отделяющих под кривой суммы мгновенного значения положительного напряжения на тиристоре и управляющего напряжения, поданного на заданный интервал времени, участки равные между собой по площади. Получение базового числа импульсов как результат преобразования мгновенного значения отрицательного напряжения на тиристоре в импульсы переменной высокой тактовой частоты, отделяющие под кривой напряжения на тиристоре участки, равные между собой по площади, позволяет измерить площадь полуволны напряжения питающей за вычетом площади полуволны ЭДС самоиндукции нагрузки. Следовательно, информация об этой площади со держится в пропорциональном ей базовом числе импульсов, полученном преобразованием отрицательной полуволны на тиристоре в переменную высокую тактовую частоту и подсчетом числа этих импульсов. Получение текущего числа импульсов в виде результата преобразования суммы мгновенного значения положительного напряжения на тиристоре и управляющего напряжения, поданного на заданный интервал времени, в импульсы переменной высокой тактовой частоты, отделяющие под кривой суммы мгновенного значения положительного напряжения на тиристоре и управляющего напряжения, поданного на заданный интервал времени, участки, равные между собой по площади, в сочетании с выработкой импульса, включающего тиристор, в моме.нт равенства текущего числа импульсов базовому числу импульсов позволяет обеспечить среднее значение напряжения на нагрузке, строго пропорциональное управляющему напряжению, независимо от формы кривой напряжения питающей сети, 1Щраметров нагрузки и пропорционального сигналу управления, поскольку сумма средних значений положительного напряжения на тиристоре и на нагрузке строго равна среднему значению полуволны отрицательного напряжения на тиристоре Внесение в число текущих импульсов числа импупьсов, пропорционального управляющему напряжению (пррпорциональ ность этой составляющей текущего числа импульсов управляющему напряжению обеспечивается тем, что инге{жал времени, в течение которого подают управляющее напряжение, стабилен и не зависит от величины управляющего напряжения, в сочетании с выработкой гёкуших импульсов, число которых пропорционально текущемузначению площади кривой положительной полуволны напряжения, приложенного к тиристору, обеспечивает выработку управляющего импульса, включающего тиристор. в тот момент времени, когда площадь кри вой напряженит, приложенного к тиристору станет равна полной площади полуволны напряжения питающей сети за.вычетом полуволны ЭДС самоиндукции нагрузки (эта информация содержится в базовом числе импульсов) и за вычетом числа импульсов пропорционального управляющему напряжению (эта информация в самом начале положительной полуволны напряжения на тиристоре вносится в число текущих импульсов). Определенный таким способом момент включения тиристора в статическом режиме обеспечивает строгую пропорциональность между средним напряжением на нагрузке и управляющим напряжением независимо от параметров нагрузки и от формы кривой напряжения питающей сети. Данный -способ цифрового управления тиристорным преобразователем цоясняет- ся нижеследующими описанием и чертежами. На фиг. 1 изображена структурная схема ущэавления тиристором; на фиг. 2 диаграммы, поясняющие способ. Схема на фиг. 1 содержит: источник переменного напряжения 1, к которому подключена нагрузка 2 через тиристор (или инрй управляемый вентиль) 3, напряжение которого {/р через элемент сум мирования 4 подается на входы первого детектора знака 5, элемента суммирования 6, второго детектора знака 7 и логического элемента НЕ 8; выход первого детектора знака 5 подсоединен к одному из входов элемента И 9 и ко входу Дозатора времени Ю, выходной сигнал которо го с момента получения входного ригна- ла замыкает на заданное время &t контакты ключа и., через который на второй вход элемента суммирования 6 подается управляющий сигнал (напряжение Уи или соответствующий ток) от. источника управляющих сигнале) 12; выход элемента суммирования 6 подключен ко входу преобразователя аналогового сигнала в высокую переменную спорную (тактовую) частоту, например, преобразователя напряжения в чистоту 13; выходной сигнал преобразователя напряжения в частоту 13 в вн яе высокочастотных сигналов опорной частоты подается на вторые входы элементов И 9 и 14; на первый вход элемента И 14 подается выходной сигнал второго де- тек тора знака 7{ выходной сигнал И 9 подается на вход 15-1 (минус) реверсивного счетчика импульсов 15; на вход 152 (плюс) счетчика 15 подается выходной сигнал элемента И 14, а на вход 15-3 (сброс) счетчика 15 - выходной сигнал логического элe.энтa НЕ 8; выходной реверсивного счетчика 15 через элемент НЕ 16 подается на управляющий электрод 17 тиристора 3; кроме того, напряжение источника, питания 1 через интегратор 18 подается на второй вход элемента суммирования 4 (изображено пунктиром на фиг. 1). Интегратор 18 и элемент суммирования 4 вводятся только в том случае, если переменное напряжение источника питания 1 имеет постоянную составляющую. Способ можно пояснить, рассмотрев работу схемы фиг. 1. Если управляющий сигнал источника 12 17 равен нулю, а постоянная составляющая в напряжении источника питания 1 отсутствует,то есть равны интегралы его полуволн, то в полупериод, когда к тиристору 3 приложено напряжение f/j, с полярностью, обратной направлению проводимости тиристора 3,это напряжение через элементы суммирования 4 и 6 подается на вход преобразователя напряжения в частоту 13 и преобразуется им в переменную высокую опорную частоту, текущее значение которой (если пренебречь длительностью максимального периода переметюй высокой тактовой частоты в сравнении с периодом напряжения источника питания, то можно употребить в дальнейшем термин мгновенное значение тактовой частоты) пропорционально мгновенному значению напряжения UT при любой его форме, благодаря чему (см. фиг. 2в) моменты перехода напряжения переменной тактсмзой частоты через нулевое значение под кривой напряжения источника 1 отделяют друг ог аруга равновеликие площади, равные интегралу полуволны напряжения U, деленному на число полупериодов (или периодов - в зависимости от устройства преобразователя напряжения в частоту 13) переменной высокой тактовой частотыч Так как преобразователь напряжения в частоту дает: на выходе сигнал, частота которого пропорциональна входному напряжению, а период выхо.аиого напряжения. следовательно, обратно пропорционален входному напряжению, то произведение входного напряжения такого преобразователя на период его выходного напряжениявеличина постоянная, то есть постоянны и площади под кривой входного напряжения, отделяемые моментами перехода через нуль выходного напряжения преобразователя напряжения в частоту. В соответствии со знаком полуволны напряжения на тиристоре 3 через детектор знака 7 выдается логическая единица на один из входов элемента И 14, на вахзрой вход ко торого поступают сигналы переменной высокой тактовой частоты, благодаря чему на выходе элемента И 14 появляются импульсы, синхронизированные с импульсами тактовой частоты, число которых за время полуволнь напряжения источника пи тания 1 фиксируется-реверсивным счетчиком 15 (базовое число импульсов), независимо от формы кривой этого напряжения Выходы всех разрядов реверсивного счетчика 15 суммируются внутри этого счетчика, благодаря чему при любом положении счетчика 15, кроме нулевого, на его выходе имеет место логическая единица инвертируемая элементом НЕ 16 в логический нуль. Во второй полупериод напря жения источника 1, соответствующий по полярности направлению проводимости тиристора 3, на выходе детектора знака 7 будет нулевой сигнал, который определит нулевой выходной сигнал элемента И .14 и прекращение заполнения реверсивного счетчика IS. В то же время начнет дават выходной сигнал детектор знака 5, который дает логические единицы на вход элемента И 9 и дозатора времени 10. С этого момента импульсы такторой частоты (текущее число импульсов) с выхода элемента И 9 будут поступать на вход 15-2 реверсивного счетчика 15, вызывая обратный счет - убывание числа импульсов, записанного в предыдущий полуг ериод напряжения источника 1. Если источник управляющего сигнала 12 дает нулевое напряжение, то замыкание контактов ключа 11 на время А t под действием выходного сигнала дозатора времени 10 никак не повлияет на работу схемы, благодаря чему реверсивный счетчик 15 закончит обратный счет, то есть выйдет на нулевой выходной сигнал, только в момен окончания рассматриваемой положительной полуволны напряжения источника 1 (напом ним, что интегралы полуволн этого напря жения равны по абсолютной величине и. следовательно, вмешают в себя равное число периодов переменной высокой тактовой частоты). Поэтому при нулевом-управляющем сигнале напряжение на нагрузке также будет равно нулю, а тиристор 3 не будет включаться. Если бы источник питания 1 имел постоянную составляющую в своем напряжении, то она была бы выделена интегратором 18 и скомпенсирована его выходным воздействием по второму входу элемента суммирования 4. Если управляющий сигнал от источника 12 не равен нулю, то в начале второй полуволны напряжения источника 1 (см. фиг, 26) этот сигнал, на время &t , в течение которого замкнуты контакты ключа 11, подается на вход элемента суммирования 6, где суммируется с второй полуволной напряжения на тиристоре 3, благодаря чему обратный счет реверсивного счетчика 15 заканчивается еще до окончания этого полупериода - в момент времени § , что вызовет включение тиристора 3. Очевидно, что площадь той части полуволны напряжения на тиристоре, которая с момента его включения будет приложена к нагрузке, в пересчете на число импульсов переменной тактовой высокой частоты будет в точности равна тому числу импульсов, которое при обратном счете поступило в реверсивный счетчик 15 под воздействием напряжения Z/y , то есть обеспечивается :строгая линейная зависимость напряжения на нагрузке от управляющего сигнала, независимо от формы кривой напряжения источника питания 1 (поэтому на фиг. 2 эта кривая взята треугольной). Если нагрузка не является чисто активной, а носит активно-индуктивный характер, то ток нагрузки будет протекать и в течение части отрицательного полупериода напряжения источника питания 1 (см. кривую активного падения напряжения Ut на фиг. 2). Из-за влияния ЭДС самоиндукции нагрузки тиристор 3 окажется отпертым до момента времени to , когда ток нагрузки станет равным нулю. Поэтому число импульсов, которым будет заполнен реверснаэный счетчик 15 воздействием по входу 15-1, будет равно числу +/S/i , соответствующему заштрихо« ванной площади ниже оси времени фиг, 26. Эта площадь будет меньше плошади целой полуволны напряжения vtcтoчникa питания 1 на величину -Si (см. фиг. 2а), являющейся мерой индуктивного падения цапряжения на нагрузке. Из-за этого в следующий интервал проводимости тиристора 3 реварсивный счетчик 15 закончит обратный счет и через элемент НЕ 16 включит тиристор 3 быстрее, чем в предыдущий интервал проводимости этого тиристора, а напряжение на нагрузке в положительный полупериод напряжения возрастет на такую величину, на которую в предыдущий интервал проводимости был уменьшен .интеграл напряжения на нагрузке из-эа влияния ее индуктивности. Таким образом-, в статических режимах, во все интервалы проводимости тиристора 3 интеграл напряжения на его активно-индуктивной нагрузке 2 держится постоянным и строго пропорциональным управляющему сигналу при любых параметрах (постоянных времени) нагрузки и при любой форме напряжения источника питания 1.
Сброс счета реверсивного счетчика 15 осуществляемый подачей сигнала на вход 15-3 этого счетчика с выхода элемента НЕ 8, обеспечивает подачу импульса включения тиристора на его управляющий электрод 17 в течение всего времени, пока тиристор 3 включен, а также все это время принудительно удерживает счетчик 15 в нулевом положении, что исключает ощибочный счет под влиянием помех и накопление ошибкиуправления при флуктуациях напряжения источника питания 1.
Данный способ цифрового управления тиристорным преобразователем, в отличие от известных способов цифрового управления, обеспечивает строгую пропорциональность между управляющим сигналом и средним значением напряжения на нагрузке независимо от ее параметров и от формы и величины напряжения питающей сети. Это обеспечивает линейность и строгую стабильность характеристик вход-выход тиристорного преобразователя как в режиме прерывистых токов, так и при непрерывных токах, что упрощает реализацию максимально возможного быстродействия тиристорных электроприводов.
Нетрудно показать, что соединение управляемых данным способом тиристоров в многофазный тиристорный преобразователь обеспечивает этому преобразователю однозначную и строго линейную статическую характеристику вход-«ыход как в зоне прерьгоистых токов, так и в зоне непрерьгоных токов.
Решение задачи высокостабильного управления тирисгорным преобразователем
данным способом, позволяющим применять цифровую технику, дает возможность, например, в металлорежущих станках с программным управлением получать системы программного управления непосредственно управляющие импульсы тиристоров и тем самым почти полностью исключить устройства управления тиристорами, поскольку мини-ЭВМ, используемая в системе программного управления, может обеспечить и все оп грации, выполняемые для цифрового управления тиристором по предложенному способу.
Формула изобретен и я
Способ цифрового управления тиристор- ным преобразователем, состоящий в том, что преобразуют постоянное эталонное напряжение в базовое число импульсе, запоминают это число, преобразуют управляющее напряжение в текущее число импульсов, сравнивают базовое число с текущим числом импульсов, соответствующих управляющему напряжению, формируют импульсы управления тиристоров в момент равенства этих чисел и получают среднее значение напряжения на нагрузке, отличающийся тем, что, с целью получения среднего значения напряжения на нагрузке независимо от формы напряжения питающей сети и ог параметров нагрузки, преобразуют отрицательное значение напряжения на тиристоре в базовое число импульссйв переменной высокой частоты, отделяющих под кр1гоой напряжения на тиристоре участки, равные между собой по площади, преобразуют сумму мгновенного значения положительного напряжения на тиристоре и управляющего напряжения, поданного на заданный интервал времени, в текущее число импульсов переменной высокой тактовой частоты, отделяющих под кривой суммы мгновенного значения положительного напряжения на тиристоре и управляющего напряжения, поданного на заданный интервал времени, участки равные между собой по площади.
Источники информации, принятые во внимание при экспертизе
1.Каталог-справочник О8.30.07-73 Тиристорные электропр1юоды на базе преобразователей серии КПТ, Инфорэлектро, М., 1973, с. 20-22,
2.Авторское свидетельство СССР
№ 465704, кл. Н 02 Р 13/16,10.11.71.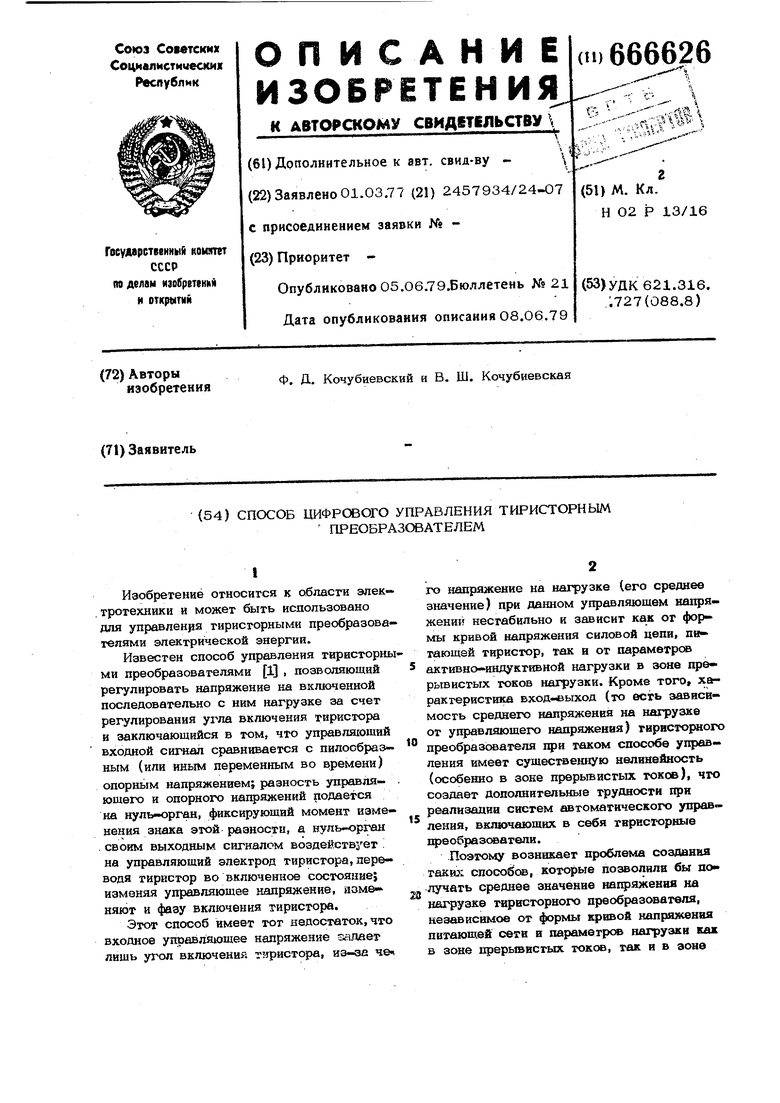
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ МИНИМАЛЬНЫХ УГЛОВ УПРАВЛЕНИЯ | 2019 |
|
RU2709026C1 |
| Способ управления тиристорным преобразователем | 1977 |
|
SU660187A1 |
| Цифровой тиристорный регулятор | 1981 |
|
SU954992A1 |
| Устройство для управления преобразователем | 1985 |
|
SU1246300A1 |
| Способ управления асинхронным электроприводом | 1989 |
|
SU1721778A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| Устройство для управления регулируемым преобразователем переменного напряжения в переменное | 1990 |
|
SU1739452A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТИРИСТОРНО-ИМПУЛЬСНЫМИ РЕГУЛЯТОРАМИ ТОРМОЗНОГО СОПРОТИВЛЕНИЯ И ТОКА ВОЗБУЖДЕНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1975 |
|
SU597297A1 |
| Устройство для подключения однофазных нагрузок к электрической сети | 1983 |
|
SU1125701A1 |
| Устройство для реверсивного управленияэлЕКТРОдВигАТЕлЕМ пОСТОяННОгО TOKA | 1979 |
|
SU832687A2 |