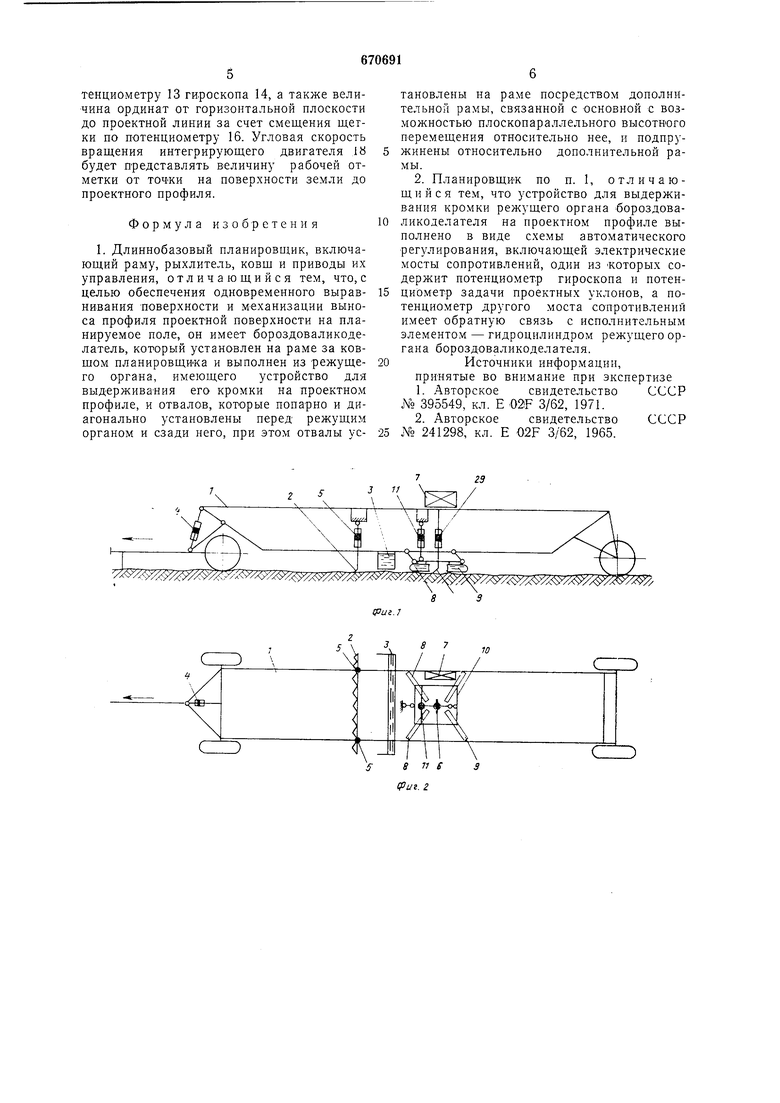
Длиннобазовый планировщик включает раму 1, рыхлитель 2, ковш 3, гидроцилиидры 4 и 5 подъема и опуекания соответственно рамы 1 и рыхлителя 2 и бороздоваликоделатель, который установлен на раме 1 за ковшем 3 планировщика и выполнен из режущего ор-гана 6, имеющего устройство 7 для выдерживания его кромки на проектном профиле, и отвалов 8 и 9, которые попарно и диагонально установлены соответственно перед режущим органом 6 и сзади него. При этом отвалы установлены на раме посредством дополнительной рамы 10, связанной с основной рамой 1 с возможностью плоскопараллельного высотного перемещения относительно нее посредством гидроцилиндра II, и подпружинены относительно дополнительной рамы 10. Устройство 7 для выдерживания кромки состоит из токогенератора 12, электрического потенциометра 13, гироскопа И, включенного в равноплечий электрический мост сопротивлений 15 с потенциометром 16 задания проектных уклонов, осуществляемого посредством стрелки шкалы 17 проектных уклонов. С токосъемных щеток потенциометров 13 и 16 разность потенциалов подается на интегрирующий двигатель 18. На валу электродвигателя 18 находится токосъемная щетка 19, положение которой повторяется стрелкой по щкале 20 рабочих отметок. Совместно с потенциометром 21 и токосъемной щеткой 22 щетка 19 составляет второй электрический мост сопротивлений 23, питающийся от автономного источника. Разность потенциалов со щеток 19 и 22 подается на спаренное реле 24, питающее через группу контактов 25 и 26 электромагнит 27, управляющий трехпозиционным золотниковым распределителем 28 гидравлического цилиндра 29 управления режущим органом 6, имеющего обратную связь с токосъемной щеткой 22. Реле 24 включает реле 30 и 31. Длиннобазовый планировщик работает следующим образом. При заходе планировщика на поле по заданному направлению при помощи гидроцилиндров соответственно 4, 5 и 11 заглубляется ковщ 3, рыхлитель 2 и отвалы 8 и 9, а кромка режущего органа 6 бороздоваликоделателя автоматически устанавливается в положение точки профиля проектной поверхности при помощи гидроцилиндра 29, управляемого посредством устройства У. При движении планировщика по полю в заданном направлении рыхлитель 2 разрыхляет грунт на заданную глубину, ковщ 3 планировщика набирает грунт на повышенны.х и отсыпает его на понил енных местах, образуя таким образом выровненную полосу поверхности. На выравниваемой полосе отвалы 8 образуют валик грунта ностоянного сечения. Режущий орган -6, режущая кромка которого поддерживается при поМОП1И гидроцилиндра 29 устройства 7 на профиле проектной поверхности, срезает верхнюю часть валика до проектного профиля там, где валик выше его, и полностью разрушает валик там, где профиль спланированной ковщом 3 планировщика поверхности совпадает с профилем проектной поверхности. Там же, где проектный профиль ниже профиля планируемой поверхности, режущий орган 6 одновременно разрушает валик и образует борозду глубиной, равной разности абсолютных отметок профилей планируемой и проектной поверхностей. Разрабатываемый режущим органом 6 грунт отваливается по обе его стороны, попадая на задние отвалы 9, и ими разравнивается. Работа устройства 7 для выдерживания кромки режущего органа заключается в следующем. Перед началом движения планировщика, на котором устройство установлено, вручную поворотом стрелки по шкале 17 устанавливается значение проектного уклона по направлению движения (прямой или обратной и его величина), а поворотом стрелки по шкале 20 устанавливается значение рабочей отметки в точке стояния планировщика. Если, к примеру, в данной точке необходима подсыпка, то при повороте стрелки и смещ,ении щетки 19 снимается напряжение такого знака, от которого сработает определенное реле 30 или 31 и своя группа контактов 25 или 26, создавая в электромагните 27 определенную полярность. Тот в свою очередь воздействует на распределитель 28 таким образом, что под порщень гидроцилиндра 29 под давлением начинает подаваться масло, и режущий орган 6 бороздоваликоделателя поднимается. Одновременно с подъемом режущего органа 6 через обратную связь начнет смещаться щетка 22 по -потенциометру 21 до согласования плеч. При нуле рассогласований отключается работавщее , электромагнит 27 отпускает золотник распределителя и последний занимает среднее положение, при котором гидроцилинд.р 29 будет закрыт, кромка режущего органа 6 бороздоваликоделателя занимает проектное положение. Аналогичная картина будет при условии необходимости срезки, только сработает другое реле, электромагнит 27 станет другой полярности, а масло под давлением будет подаваться на поршень гидроцилиндра 29, и кромка режущего рабочего органа 6 придет К проектной отметке. С самого начала работы планировщика к исходной рабочей отметке, задаваемой положением щетки 19, будут алгебраически прибавляться величины ординат от поверхности запии до горизонтальной плоскости по покаанию гироскопа 14 в виде электрических игналов за счет смещения щетки по потенциометру 13 гироскопа 14, а также величина ординат ог горизонтальной плоскости до проектной линии за счет смещения щетки по потенциометру 16. Угловая скорость вращения интегрирующего двигателя 18 будет представлять величину рабочей отметки от точки на поверхности земли до проектного профиля. Формула изобретения 1. Длиннобазовый планировщик, включающий раму, рыхлитель, ковщ и приводы их управления, отличающийся тем, что, с целью обеспечения одновременного выравнивания поверхности и механизации выноса профиля проектной поверхности на планируемое поле, он имеет бороздоваликоделатель, который установлен на раме за ковщом планировщика и выполнен из режущего органа, имеющего устройство для выдерживания его кромки на проектном профиле, и отвалов, которые попарно и диагонально установлены перед режущим СИ WOdilUil-y.L (j. ii iJVj. . i-fi f v - f j-j - органом и сзади него, при этом отвалы установлены на раме посредством дополнительной рамы, связанной с основной с возможностью плоскопараллельного высотного перемещения относительно нее, и подпружинены относительно дополнительной рамы. 2. Планировщик по п. 1, отличающийся тем, что устройство для выдерживания кромки режущего органа бороздоваликоделателя на проектном профиле выnovTHeHO в виде схемы автоматического регулирования, включающей электрические мосты сопротивлений, один из которых содержит потенциометр гироскопа и потенциометр задачи проектных уклонов, а потенциометр другого моста сопротивлений имеет обратную связь с исполнительным элементом - гидроцилиндром режущего органа бороздоваликоделателя. Источники информации, принятые во внимание нри экспертизе 1.Авторское свидетельство СССР № 395549, кл. Е 02F 3/62, 1971. 2.Авторское свидетельство СССР r № 241298, кл. Е 02F 3/Ь2, 1955.
2
U V
S3
25

| название | год | авторы | номер документа |
|---|---|---|---|
| Планировщик | 1990 |
|
SU1768718A1 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 1997 |
|
RU2131664C1 |
| Способ планировки и почвообработки перед посевом и комбинированное орудие для его осуществления | 1989 |
|
SU1762772A1 |
| ДЛИННОБАЗОВЫЙ ПЛАНИРОВЩИК \'^ ?50 | 1972 |
|
SU357327A1 |
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| Длиннобазовый планировщик | 1981 |
|
SU1105562A1 |
| МЕХАНИЗМ НАВЕСКИ ГРЕЙДЕРА-ПЛАНИРОВЩИКАНА ТРАКТОР | 1970 |
|
SU268281A1 |
| Автоматизированный планировщик | 1979 |
|
SU815172A1 |
| Планировщик | 1975 |
|
SU580282A1 |
| ДЛИННОБАЗОВЫЙ ПЛАНИРОВЩИК | 1973 |
|
SU377481A1 |

