(54) АВТОМАТИЗИРОВАННЫЙ ПЛАНИРОВЩИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Длиннобазовый планировщик | 1977 |
|
SU670691A1 |
| Устройство автоматической разгрузки грунта из ковша планировщика - скрепера | 2021 |
|
RU2762270C1 |
| Планировщик | 1987 |
|
SU1507917A1 |
| Рабочий орган планировщика | 1987 |
|
SU1550045A1 |
| Планировщик | 1975 |
|
SU619592A1 |
| Ковш планировщика | 1976 |
|
SU658234A1 |
| Планировочная машина | 1980 |
|
SU909028A1 |
| Планировщик | 1986 |
|
SU1384670A1 |
| Планировщик | 1979 |
|
SU863782A1 |
| Планировщик | 1984 |
|
SU1252435A2 |
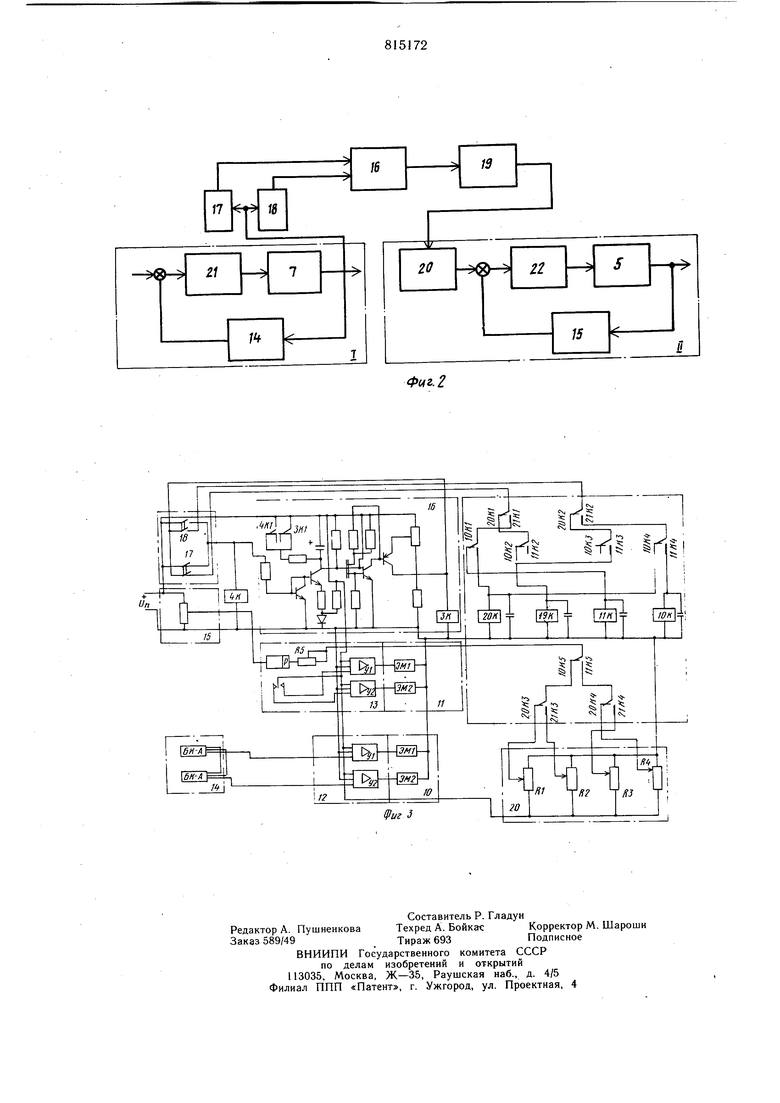
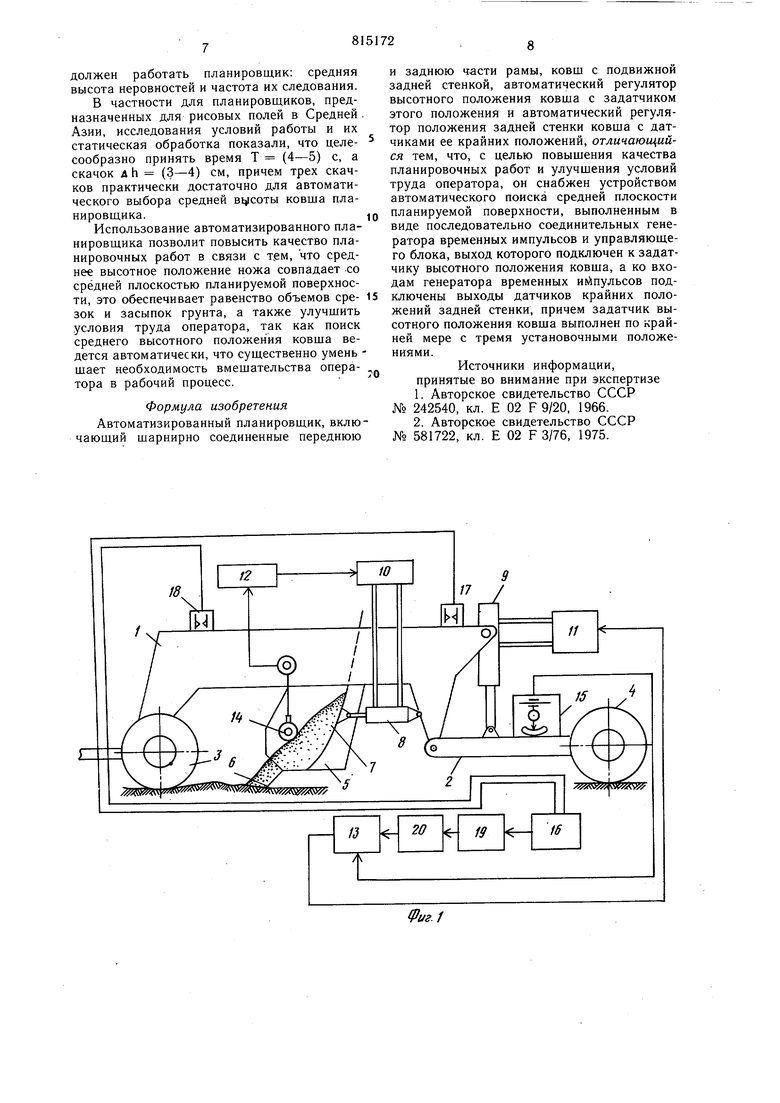
Изобретение относится к строительномудорожному и мелиоративному машиностроению, в частности к автоматизированным машинам для планирования земляной поверхности. Известен планировшик с двумя контурами регулирования и дополнительным колесом, которое катится по спланированной поверхности. Задняя стенка бездонного ковша такого планировшина неподвижна, что вызывает повышенное сопротивление передвижению планировш,ина, а система управления сложна и ненадежна 1. Известен также автоматизированный планировш.ик, включаюш,ий шарнирно соединенные переднюю и заднюю рамы, ковш с подвижной задней стенкой, автоматический регулятор высотного положения ковша с задатчиком этого положения и автоматический регулятор положения задней стенки ковша, с датчиками ее крайних положений. Автоматическое регулирование положения задней стенки обеспечивает достаточно равномерную загрузку и опорожение ковша. При этом весьма важно, чтобы среднее высотное положение ковша совпадало с уровнем некоторой средней плоскости, относительно которой имеет место примерное равенство объемов выступов и объемов впадин планируемой поверхности. Если это условие соблюдается, грунт, срезаемый ковшом с выступов, заполняет имеющиеся впадины, и ковш в процессе работы то заполняется грунтом, то опустошается 2. Если это условие нарушено, и ковш опушен ниже уровня этой средней плоскости, суммарный объем выступов больше суммарного объема впадин, и ковш постоянно переполнен при крайнем заднем положении его стенки. Наоборот, если ковш поднят выше этой средней плоскости он остается по преимуш.еству пустым, задняя стенка автоматически занимает крайнее переднее положение, а грунта для засыпки впадин недостает. Важен правильный выбор средней высоты ковша. Кроме того, характер планируемой поверхности может быть различным на разных ее участках, в ходе работы эта средняя высота может изменяться и также должна корректироваться. В известных устройствах корректировка выполняется оператором вручную путем смещения в ту или другую сторону нулевого (среднего) положения задатчика системы автоматического управления высотой ковша. Оператор, обнаружив, что ковш сиётематически переполнен, принимает решение о необходимости поднять его среднее положение на некоторую высоту и делает это, воздейств уя с пульта на положение «нуля задатчика высотного положения ковша. Если планировш.ик движется пр.еимуш,ественно с пустым ковшом, то оператор соответственно понизит среднюю высоту режуш,ей кромки таким же образом. Эти корректировки высотного положения ковша отвлекают внимание оператора от основных функций управления планировщиком. Кроме того, ввиду субъективности оценок рельефа поля и индивидуальности квалификации оператора, корректировки производятся не всегда правильно и своевременно, что отражается на качестве планировочных работ. Цель изобретения - повышение качества планировочных работ и улучшения у;ловий труда оператора. Поставленная цель достигается тем, о автоматизированный планировщик снабжен устройством автоматического поиска высоты средней плоскости планируемой поверхности, выполненным в виде последовательно соединенных генератора временных импульсов и управляющего блока, выход которого подключен к задатчику высотного положения ковша, а ко входам генератора временных импульсов подключены выходы датчиков крайних положений задней стенки, причем задатчик высотного положения ковша выполнен по крайней мере с тремя установочными положениями. На фиг. 1 изображен автоматизированный планировщик, общий вид; на фиг. 2 - функциональная схема системы автоматического управления; на фиг. 3 - пример выполнения принципиальной схемы. Планировщик состоит из передней 1 и задней 2 частей рамы, шарнирно соединенных между собой и опирающихся на передние 3 и задние 4 колеса планировщика, ковща 5 с режущей кромкой 6 и подвижной задней стенкой 7, установленного на передней части рамы гидроцилиндра 8 перемещения задней стенки ковша, гидроцилиндра 9 изменения высотного положения .ковша, электрогидравлического золотника 10 регулятора положения стенки ковша (РПС), управляющего гидроцилиндром 8, электрогидравлического золотника 11 регулятора высотного положения ковша (РПК), , управляющего гидроцилиндром 9, пульта управления 12 (РПС), соединенного с золотником 10, и пульта управления J3 (РПК), соединенного с золотником И, датчика уровня 14, установленного на передней части рамы, внутри ковша, и соединенного с пультом управления 12, датчика угла 15, установленного на задней части рамы и соединенного с пультом управления 13, генератора временных импульсов 16, соединенного с датчиками крайних положений стенки ковша 17 и 18 и через управляющее устройство 19 с задатчиком 20 автоматического регулятора высотного положения ковща. Функциональная схема системы автоматического управления планировщиком включает регулятор положения стенки ковша (РПС), состоящий из соединенных между собой регулятора 21, включающего пульт управления, золотник и гидроцилиндр, объекта регулирования (стенки ковща) 7, датчика уровня 14; регулятор высотного положения ковша (РПК), состоящий из соединенных между собой регулятора 22, включающего пулы управления, золотник и гидроцилиндр, объекта регулирования (ковша) 5, датчика углового положения 15 и задающего устройства 20; датчик крайних положений стенки ковща 17 и 18; генератор временных, импульсов 16, соединенный по входу с датчиками крайних положений 17 и 18, а по выходу с управляющим устройством 19, которое в свою очередь соединено с задатчиком регулятора высотного положения ножа 20. Генератор временных импульсов 16 (фиг. 3) представлен полупроводниковым импульсным генератором, в виде генератора линейноизменяющегося напряжения. Обмотка реле 4 -к подключена к датчикам крайних положений 17 и 1о, а контакты - к разрядной цепочке генератора импульсов. Задающее устройство 20 выполнено в виде блока задатчиков R, - R4, положение движков которых сдвинуто на некоторую величину относительно друг друга. Взаимный сдвиг движков выбран таким образом, чтобы при переключении задатчика с одного из сопротивлений к соседнему высота ковща изменилась на некоторую величину Ah вверх при переходе от задатчика R, к R, или от R к Rj и т. д. ВНИЗ при переходе в обратную сторону. Управляющее устройство 19 - дистанционный переключатель в виде блока реле 10к, 11к, 20к и 19к, контакты которых расположены в цепях движков сопротивлений задатчика и обмоток самих реле. На принципиальной схеме показаны также датчик уровня 14, включающий в себе преобразователи перемещений БК-А и, соединенный с пультом управления 12, включающим усилители мощности У г и Уг, выходы которых соответственно соединены с электромагнитами ЭМ1 и ЭМ2 электрогид равлического золотника 10; датчик угловых перемещений 15, соединенный с пультом управленияМЗ, включающим поляризованное реле Р и сопротивление изменения чувствительности R, а также усилители мощности Y| У, управляюмые по входу контактами поляризованного реле Р и соединенные по выходу соответственно с электромагнитами ЭМ1 и ЭМ2 электрогидравлического золотника 11; реле Зк, обмотка которого включена на выходе генератора временных импульсов 16, а контакты ЭК1 на входе этого генератора, предназначенное для возвращения генератора импульсов в нулевое положение путем замыкания цепи разряда конденсатора каждый раз, когда выходное напряжение генератора достигнет величины срабатывания реле Зк. После этого реле отпускает контакты ЭК1 размыкаются и начинается опять отсчет времени. Принцип действия планировшика еледующий. При работе планировшика регулятор высотного положения режущей кромки ковша (РПН), сравнивая сигналы задатчика 20 и датчика углового положения 15, по разности этих сигналов, выделяемых пультом 13 (РПН) и поступающей на электрогидрозолотник 11, приводит в действие гидроцилиндр 9, изменяющий угол между рамами, т. е. высотное положение ковша 5. При этом положение задней стенки 7 ковша 5 изменяется автоматически по сигналу датчика уровня 14, который поступает через пульт 12 РПС в электрогидрозолотник 10 и приводит в действие гидроцилиндр 8 перемещения задней стенки 7 ковша 5. Положение задней стенки ковша зависит от степени наполнения ковша. По мере его наполнения при срезании выступов планируемой поверхности стенка отодвигается назад; по мере разгрузки при отсыпке части грунта для заполнения выемок в планируемой поверхности стенка -перемещается вперед. В начале работы при пустом ковше стенка занимает крайнее переднее положение, замыкается датчик переднего- положения 18 и запускается генератор временных импульсов 16 (фиг. 1 и 3), который начинает отсчет времени. Если за время, меньшее периода Т следования импульсов генератора 16, ковш заполняется грунтом, датчик уровня грунта 14 выдает сигнал и стенка отодвигается назад, датчик 18-размыкается, генератор 16 отключается, так как обесточивается обмотка реле 4К, его контакт 431 разряжает генератор 16. Если в течение периода Т, ковш грунтом не заполняется, т. е. положение ковша в начале работы оказывается .слишком высоким, то датчик 18 остается замкнутым, и генератор 16 через период Т выдает первый импульс. Допустим, что в этом положении ковш находился на высоте, определяемой сигналом задатчика 20, снимаемым с сопротивления Rj. (Таково было, например, положение в момент остановки планировщика). При этом замкнуты все контакты реле 20К и все контакты реле ПК и, следовательно, подготовлена цепь для срабатывания реле 10К. Импульс с генератора 16 питает реле 10К. Замыкаются все его контакты и с выводом датчика 15 соединяется сопротивление 1 задатчика 20. Изменяется разность между сигналом задатчика 20 и датчика 15, ковш опускается на определенную величину Ah. После срабатывания дистанционного переключателя контакты ЗК1 реле ЗК замыкают разрядную цепочку генератора 16 и счет времени начинается снова. Если оказывается, что, опустившись на эту величину, ковш начинает заполняться грунтом, срабатывает датчик уровня грунта 14, задняя стенка ковша отодвигается назад, размыкается датчик крайнего переднего положения 18 и генератор 16 отключается. Ковш по высоте управляется от нового более низкого среднего уровня. Если ковш опушен на величин.у Ah, и этого окажется недостаточным для того, чтобы ковш начал срезать грунт, то через время Т с генератора 16 поступает еш,е один импульс, который питает обмотку реле 19К, замыкаются все его контакты, и с выводом датчика 15 соединяется сопротивление R задатчика 20. Ковш опускается еще на величину Ah. Ковш переполняется грунтом, когда весь срезаемый им грунт не расходуется на заполнение впадин планируемой поверхности, В этом случае стенка ковша занимает и достаточно долго остается в крайнем заднем положении. Замыкается датчик заднего крайнего положения 17, генератор 16 начинает отсчет времени и через время Т выдает импульс, который питает реле 20К, все его контакты замыкаются и с выводом датчика 15 вновь соединяется сопротивление Rji, задатчика 20: ковш поднимается на Ь, т. е. занимает новое, более высокое среднее положение, Задатчик 20 имеет три ступени регулирования, т. е. допускает автоматический подъем среднего положения ножа ЗдЬ от положения, определяемого сигналом с сопротивления R, до положения, определяемого сопротивлением R. И, наоборот, среднее положение ножа может быть опушено вниз тоже на 3Ah от R до R/. В начале работы планировшик должен быть установлен на горизонтальную площадку, а режущая кромка ковша - на уровень колес. При этом нулевое положение задатчика 20 должно соответствовать уровню, определяемому сопротивлением Rf, поскольку при дальнейшей работе среднее положение ковша может оказаться заниженным и практически почти никогда не потребуется его опускать, Число ступеней регулирования может быть и больше трех, а величина скачка по высоте л h, как и период времени Т следования импульсов генератора 16, следует выбирать исходя из тех условий, в которых должен работать планировщик: средняя высота неровностей и частота их следования. В частности для планировщиков, предназначенных для рисовых полей в Средней Азии, исследования условий работы и их статическая обработка показали, что целесообразно принять время Т (4-5) с, а скачок А h (3-4) см, причем трех скачков практически достаточно для автоматического выбора средней BijicoTbi ковща планировщика. Использование автоматизированного планировщика позволит повысить качество планировочных работ в связи с тем, что среднее высотное положение ножа совпадает со средней плоскостью планируемой поверхности, это обеспечивает равенство объемов ерезок и засыпок грунта, а также улучщить условия труда оператора, так как поиск среднего высотного положения ковща ведется автоматически, что существенно умень шает необходимость вмещательства оператора в рабочий процесс. Формула изобретения Автоматизированный планировщик, вклю чающий шарнирно соединенные переднюю И заднюю части рамы, ковщ с подвижной задней стенкой, автоматический регулятор высотного положения ковща с задатчиком этого положения и автоматический регулятор положения задней стенки ковща с датчиками ее крайних положений, отличающийся тем, что, с целью повыщения качества планировочных работ и улучщения условий труда оператора, он снабжен устройством автоматического поиска средней плоскости планируемой поверхности, выполненным в виде последовательно соединительных генератора временных импульсов и управляющего блока, выход которого подключен к задатчику высотного положения ковща, а ко входам генератора временных ил)1пульсов подключены выходы датчиков крайних положений задней стенки, причем задатчик высотного положения ковща выполнен по крайней мере с тремя установочными положениями. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 242540, кл. Е 02 F 9/20, 1966. 2.Авторское свидетельство СССР № 581722, кл. Е 02 F 3/76, 1975.
