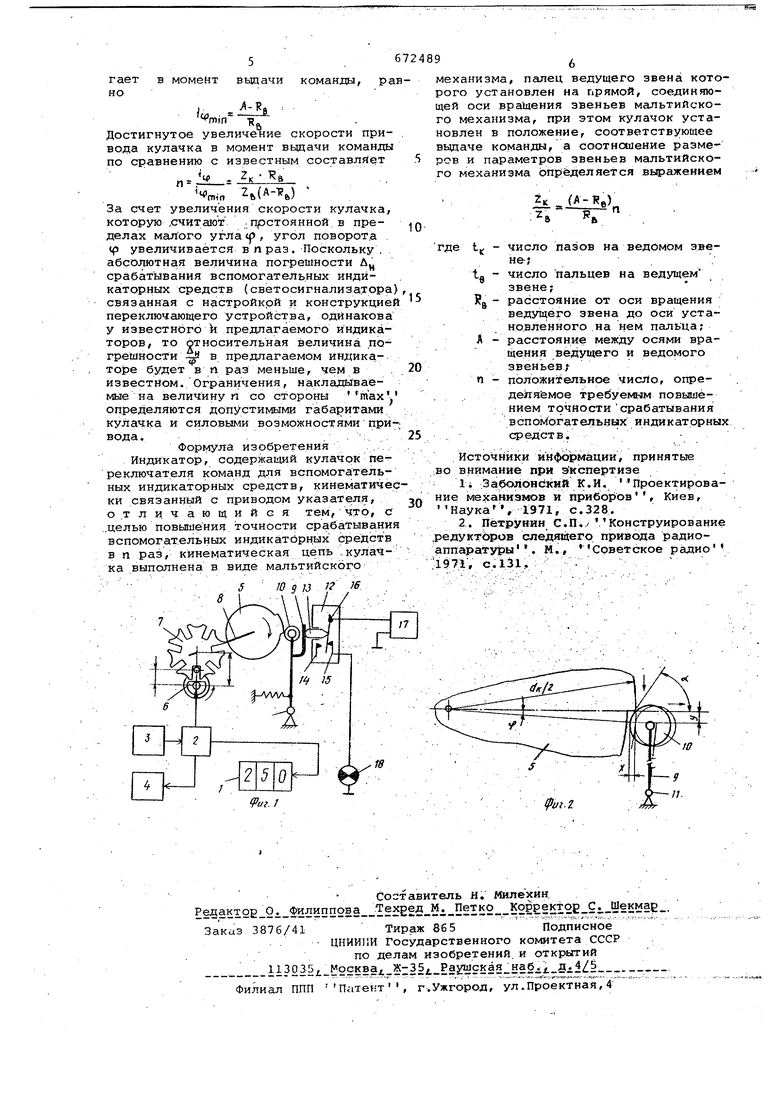
, . - . . . Изобретение отнс сится к области приборостроения и может быть испольэовано для индикации в системах автомат-ивеского контроля параметров процесса или состояния объекта. . Известны индикаторы с кулачковым .механизмом, содержащим вал, кинематически связанный с приводом указателя, и жестко сидящий на валу кулачок, находящийся в силовом замыкании с рычагом, имеющим ось вращения Наиболее близким к предлагаемому по техническрй сущности и достиг.аемому результату является индикатор соде жащий кулачок переключателя для вспомогательных индикаторных средств кинематически связанный с приводом указателя. Кулачок взаимодействует с РОЛИКОМ) имеющим ось вращения и установленным на рычажном нажимном устройстве переключателя команд 2 Недостатком известных индикаторов с электромё.ханйческим пареключаюиЦим устройством ябляется недостаточная точность выдачи сигналов команд. По вышение точности связано с увеличением диаметра кулачка, что не всегда возможно. Кроме того, отмечается низкая скорость перемещения штока переключателя ввиду того, что используется тихоходный однооборотный кулачок, установленный на выходе отсчетной кинематической цепи. Зачастую нет возможности обеспечить минимально возможную для штоков переключателей CKOpodTb 0,1 мм/сек (например, ОЮО,360.007 ТУ). Например, рассмотрим цифрозвой индикатор дальН9СТЙ с диапазоном иэмер1ения О 500 км, углом пойорота кулачка 330 , скоростью изменения параметра на входе 1000 км/час, временем отработки шкалы 30 мин. Углобая скорость вращения кулачка равна О,ISVceK, Потребное для включения переключателя перемещение его штока в dooTветствии с СЖЮ.ЗбО.007 ТУ составляет X : рабочий ход + 2/3 дополнительного, хода x:fO,15 + 0,,5 мм (фиг.2) При скорости штока 0,1. мм/сек на перемещение штока на 0,5 мм пстребуется 5 с, при этом кулачок повернется на угол tp 0,,9 Линейная величине, перемещения кулачка У, соответствующая повороту на угол ф , составляет. где d - диаметр кулачка, . ф.ЗбО откуда tpF поскольку {фиг.2), то , X. ЗБО . 0,5560 „., V .0,9-ДГ 6А(мн) Установить такой кулачок, например, в. индикатор с габад)итами лицеврй части 65x65 мм невозможно. Уменьшение диаметра кулачка до 20 приводит к уменьшению скорости шток более, чем в три раза ниже допустимой, к снижению точности вьиачи сигналов команд. Целью изобретения является повы щение точности срабатывания вспомогательных индикаторных средств (сиг налцзаторов). Поставленная цель достигается. тем, что кинематическая цепь кулачк выполнена в виде мальтийского мехганизма/Палец ведущего звена которого установлен на прямой,соединяющей оси вращения звеньев мальтийско механизма, при этом кулачок устанрв « &vauuQfuia . ттглм v fTTatjr v лен в Положение, соответствующее вьздаче команды, а соотношение, размеров и параметров звеньев мальтий.ского механизма определяется выраже к. U--RE) где t. - число пазов на вёдЪмом зв . не; -. tj числ6.пальцев йа §ёДуй1ём . / звене; , -- .5д- расстояние ОТ оси вращения йедуще: о до оси установленного на нем пал расстояние между осями вр щения ведущего и ведомого ;.:. звеньев ; - ;. : п - положительное число, , определяёмре требуед«лм . повышением точности сраба тывдния вспОмогательйых индикаторных средств. На фиг.1 представлена кинематиче кая схема предлагаемого индикатора на фиг.2 - взаимодействие кулачка с роликом нажимного рычагапереключателя и Соотношения их размеров и пе ремещений. Цифровой указатель 1 индикатора выполненный в виде барабанного меха нического счетчика, через редуктор связан с двигателем 3 и потенциомет ром 4 обратной связи следя4 ей систе мы. В кинематическую .цепь привода кулачка 5 включено водило 6 (ведуще звено) и мальтийский крест 7 (ведо мое звено) - звенья мальтийского ме ханизма. Мальтийский крест 7 связа с кулачком 5 валом 8. Нажимн.ой рычаг 65 9 имеет роли к 10 и ось качания 11. Переключатель 12 содержит шток 13, неподвижные контакты 14, 15 и пере- . кидной контакт 16, образующий с контактом 14 нормально замкнутую группу, ас контактом 15 - нормально разомкнутую группу контактов. Источник питания 17 присоединен одним полюсом непосредственно, а другим - через контакты 14, 15 переключателя 12 к светосигналиэатору 18, являющемуся вспомогательным индикаторным средством. Фазовое соотношение звеньев мальтийского механизма и кулачка определяет эффективность введения мальтийского механизма. Максимальный эффект дает установка пальца водила на прямой, соёдиНяюГцей центры вращения звеньев мальтийского механизма, а кулачка в положение, соответствующее выдаче команды. Кулачок и мальтийский крест жесгко связаны. Индикатор работает следующим образом.. . . При наличии сигнала на обмотках двигателя 3 йращение вала двигателя через редуктор 2 передается на барабаны счетчика 1. При определенных положениях отсчетнрго механизма инTTn.TTriWe HtTCTV l ywavAPW4M гтн - дикатора, например при показании 250 км, соответствующем половине пройденного пути, кулачок 5, взаимодействуя с роликом 10 нажимного.рычага 9, приводит шток 13 в движение и замыкает контакты 14, 15, в результате замыкается цепь питания светосигнализатора 18. Момент замыкания цепи питания светосигнализатора определяет выдачу команда/ положения звеньев мальтийского механизма и кулачка в мОмент выдачи команды соот- . ветствуют максимальной скорости Перемещения мальтийского креста 7 (см.фиг.1). Передаточное число мальтийскОго.механизма в этот момент достигает своего минимального значения. . Выполнение кинематической цепи кулачка в виде мальтийского механизма повышает точность вьщачи команд и срабатйванйя вспомогательных индикаторных средств. Представим передаточное число привода кулачка J в виде.м 1-1ц1, где 1ф - передаточное число зубчатой передачи, которую заменил мальтийский 4ёxaнизм (переменная часть передаточного числа); i - передаточное число остальной части зубчатой передачи привода кулачка. Выразим fjB через параметры мальтийского механизма, как (р . : . Предполагаем, что i для известного и предлагаемого индикатора равны (в .случае целого числа оборотов водила) или по возможности близки (в случае, когда угол поворота мальтийского креста составляет нецелое число шагов дискретного движения). Минимальное лередаточное число мальтийского механизма, ifcoTpporo механизм лостив момент выдачи команды, ра J -a min Достигнутое увеличение скорости привода кулачка в момент вьщачи команды по сравнению с известным составляет ч-стчп ь(А-тг,) За счет увеличения скорости кулачка, которую ,считают -прстоянной в пределах малого , угол поворота (р увеличивается впраз. Поскольку . абсолютная величина погрешности Дц срабатывания вспомогательных индикаторных средств (светосигнализатора связанная с настройкрй и конструкцие переключающего устройства, одинакова у известного ii предлагаемого индикаторов, то относительная величина погрешности -J в предлагаемом индикаTojpe будет в п раз меньше, чем в . известном.Ограничения, накладываемые на величину п со стороны таху определяются допустимыми габаритами, кулачка и силовыми возможностями при вода, , . :, Формула изобретения . Индикатор, содержащий кулачок переключателя команд для вспомогательных индикаторных средств, кинематиче ки связанный с приводом указателя, отличающийся тем, что, с ..целью повышения точности срабатывани вспомогательных индикаторных средств в п раз, кинематическая цепь .кулачка .выполнена в, виде мальтийского S Ю S 13 1 е анизма, палец ведущего звена котоо установлен на гфямой, соединяюоси вращения звеньев мальтийскомеханизма, при этом кулачок устален в положение, соответствующее аче команды, а соотношение размеи параметров звеньев мальтийскомеханизма определяется выражением 2 (Л - Re). t,- - число пазов на ведомом эвене-jчисло пальцев на ведущем звене; расстояние от оси вращения ведущего звена до оси установленного на нем пальца; А - расстояние между осями вращения ведущего и ведомого 3 веньев1 п - положительное число, определяемое требуемым повышением точности срабатывания вспомогательных индикаторных средств. Источники информации, принятые внимание при экспертизе li ЗаболрнскиЙ К.И, Проектировамеханизмов и приборов , Киев, аука, 1971, с.328. 2. Пётрунйн С.П./Конструирование уктЬров следядего привода радиоаратуры. М., Советское радио aV с. 131, : ;;.; - - , 
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |
| БИБЛИОТЕКА | 1973 |
|
SU368696A1 |
| Устройство для перестройки резонансных контуров | 1988 |
|
SU1663759A1 |
| ЧАСЫ С ЛУННЫМ КАЛЕНДАРЕМ | 2014 |
|
RU2572466C1 |
| Устройство для прессования порошковых материалов | 1991 |
|
SU1834811A3 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| ЧАСЫ С ИНДИКАЦИЕЙ ВОЗРАСТА ВСЕЛЕННОЙ | 2019 |
|
RU2696672C1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 2000 |
|
RU2184893C2 |
