Изобретение относится к машиностроению и может быть использовано как управляемая система для робототехничего устройства с программным управлением, которое может быть перепрограммируемо по сигналу управляющей ЭВМ, т.е. выполнять несколько другое движение исполнительным органом и применяться в разных областях промышленности, включая гибкие автоматизированные производства.
Известен кулачковый механизм преобразования вращательного движения в прямолинейно поступательное с изменяемым ходом: Франция, А1 2692331, F 16 Н 25/10, публикация 17.12.93г., 50. Однако недостатком его являются невысокие кинематические возможности.
Наиболее близким к предлагаемому механизму является механизм SU 1295105, кл. F 16 H 27/06, 1987, который совершает возвратно-поступательное и прерывисто-вращательное движение, т.е. кинематические возможности тоже относительно не высоки. Однако главным недостатком этих вышеупомянутых механизмов является их невозможность регулировки в процессе работы механизма для выполнения ведомым валом другой траектории движения, в частности, более сложной, например, сопоставимой с рукой человека, например, как в режиме робота с перепрограмируемостью по сигналу управляющей ЭВМ.
Целью предлагаемого механизма является обеспечение возможности его использования в качестве гидромеханической системы перепрограммируемого робота, работающего от одного основного привода, а не просто как механизма, работающего в режиме автооператора. Стоит заметить, что заявляется только сама эта система, для которой нужно будет разработать программу управления по известным методикам.
Указанная цель достигается тем, что используются известные в машиностроении кулачковые механизмы с изменяемым законом движения или с изменяемым ходом выходного звена, причем регулировка их соответствующих частей осуществляется за счет кинематического подсоединения к ним, а также к водилу мальтийского креста и корпусу кулачка выходных звеньев вспомогательного регулируемого привода, например гидравлического /в принципе возможны пневматический и электрический/, который более других подходит для данной принципиальной схемы и который кинематически связан с ведущим валом, т.е. с основным приводом, сообщающим вспомогательному приводу движение. В итоге выходное звено /исполнительный орган/ совершает различные траектории движения в процессе согласованной работы всех частей с использованием программного управления и в достаточно широком диапазоне. Следует заметить, что во всех известных роботах, например промышленных, используются для осуществления подобных сложных траекторий несколько приводов, допустим управляемых электродвигателей; в предлагаемом же используется всего один электродвигатель, с которым связан ведущий вал, а уже с ведущим валом кинетически связан вспомогательный регулируемый привод. А это в свою очередь существенно отражается на точности работы, ведь чем больше электродвигателей /или вообще двигателей/ в системе, тем больше ее динамическая погрешность, значит менее точная система управления из-за динамических возмущений в электродвигателях, даже при наличии обратных связей погрешность в системе заметно не уменьшается. Поэтому если использовать предлагаемый механизм тоже с обратной связью, то это значительно минимизирует погрешность в управлении, т.к. будет работать от одного источника энергии или двух, ведь гидравлический привод также может работать от другого источника энергии, кроме того, система будет менее громоздкой и менее металлоемкой.
К описанию прилагаются следующие чертежи. На фиг.1 изображена принципиальная схема предлагаемого механизма; на фиг.2 изображена конструктивная особенность устройства кулачка на фиг.3 - вариант исполнения кулачка; на фиг. 4 - конструктивные особенности подсоединения элементов гидропривода; на фиг. 5 - следующий вариант исполнения кулачка; на фиг.6 - другие конструктивные особенности подсоединения элементов гидропривода; на фиг.7 - принципиальная гидравлическая схема вспомогательного гидропривода.
Механизм преобразования вращательного движения в прерывистое вращательное и возвратно-поступательное содержит корпус 1, размещенный в нем ведущий вал 2 /понятно, что основной, скажем, электропривод подразумевается, он находится вне корпуса/, на котором находится кулачок /2шт./, водило 4 с пальцем 5, взаимодействующим с пазами мальтийского креста 6, установленного на промежуточном валу 7, при этом положение креста 6 всегда будет фиксироваться дугообразным сектором /при рассмотрении мальтийского креста с внешним зацеплением/, несколько утолщенным для обеспечения контакта после выхода пальца 5 из зацепления с крестом 6. Промежуточный вал 7 кинематически с помощью двух конических колес 8 и 9 связан со вторым промежуточным валом 10. Второй промежуточный вал 10 соединен с помощью шлицевого соединения 12. Ведомый вал 11 размещен в отверстии 13 толкателя 14, ролики 15 которого взаимодействуют с кулачками 3, причем толкатель 14 подпружинен пружиной 16 /в количестве 2 шт./.
Для обеспечения постоянного контакта роликов 15 толкателя 14 с кулачками 3 толкатель 14 дополнительно подпружинен пружинами 17 относительно корпуса 1. Далее ведущий вал 2 через коническое зубчатое зацепление - колеса 18 и 19 связан с третьим промежуточным валом 20, который выполнен телескопическим и на котором закреплено цилиндрическое зубчатое колесо 21, причем вращение этому колесу передается за счет шлицевого соединения телескопического вала 20. С колесом 21 связано другое зубчатое колесо 22, которое выполнено также цилиндрическим, при этом внутренняя поверхность этого колеса 22 представляет многопрофильный кулачок 23, который охватывает исполнительный вал 24, связанный с ведомым валом 11 муфтой Гука 25. В свою очередь зубчатое колесо 22 насажено на телескопическую полую опору 26, при этом эта полая опора 26 соединена с колесом 21 посредством коромысла 27 и жестко соединенной с ним втулкой 28, которая охватывает круглую поверхность В колеса 22. Заметим, что колесо 21 имеет возможность вращаться относительно коромысла 27. Далее мальтийский крест 6 через четвертый промежуточный вал 29 и закрепленное на нем коническое зубчатое колесо 30, которое соединено в свою очередь с другим коническим зубчатым колесом 31 и которое крепится на пятом промежуточном валу 32. На валу 32 закреплено цилиндрическое зубчатое колесо 33, которое входит в зацепление со следующим цилиндрическим зубчатым колесом 34, выполненным полым на опоре 35. В свою очередь на зубчатом колесе 34 (его плоской части) жестко закреплен, подпружинен пружиной 36 с возможностью совершать колебательные движения толкатель 37, при этом сопряжение с многопрофильным кулачком 23 происходит при помощи шарика 38, заделанного на конце обоймы толкателя 37 /известная конструкция/, который с исполнительным валом 24 соединен шарнирно посредством втулки 39. Опора 40, в которой толкатель 37 совершает возвратно-поступательные движения и которая жестко закреплена на колесе 34, имеет возможность совершать вместе с ними круговые движения. Потом при помощи цилиндрической зубчатой передачи - колес 41 и 42, причем колесо 41 закреплено на ведущем валу 2, а колесо 42 - на шестом промежуточном валу 43, который подсоединяется к гидроприводу 44 /показан условно/, тем самым обеспечивая работу гидроцилиндров 45, соединенных в свою очередь со всеми подвижными регулируемыми элементами предлагаемого механизма.
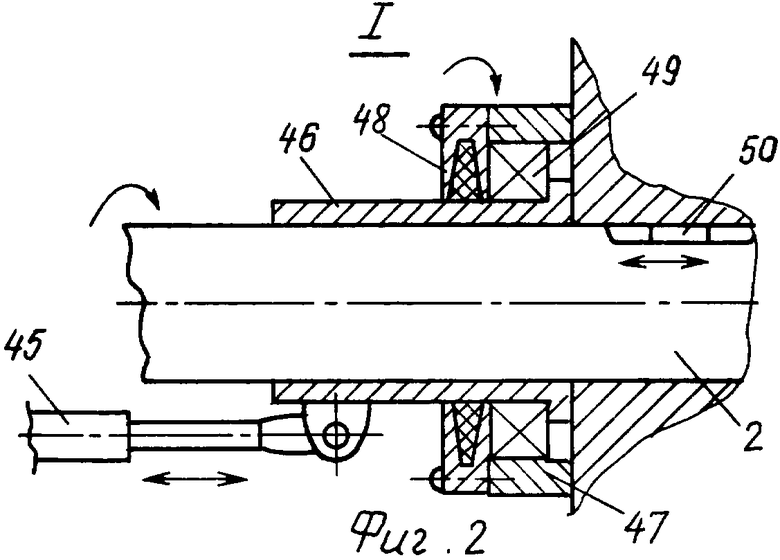
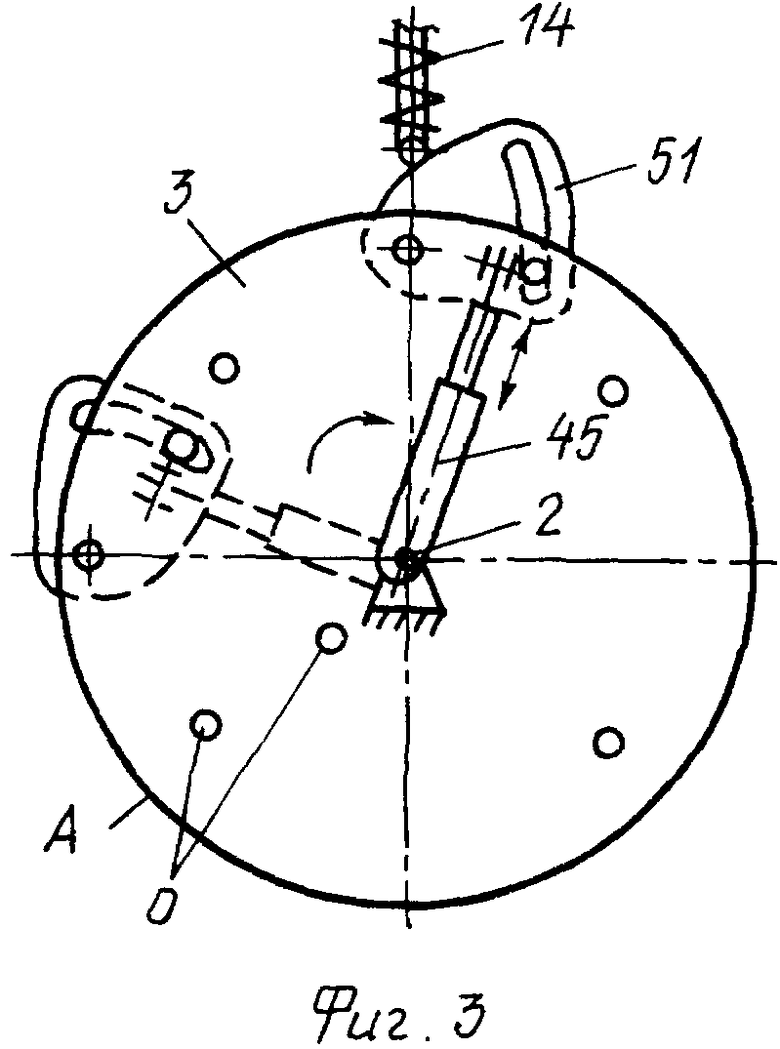
На фиг. 2 изображен фрагмент конструктивного исполнения подсоединения гидроцилиндра 45 к втулка 46, которая с ведущим валом 2 не вращается и одной частью с буртиком помещена во внешний корпус 47 кулачка 3. При этом втулка 46 фиксируется крышкой 48 корпуса 47 и подшипником 49. Заметим, что перемещение всего кулачка 3 для выхода, например, на его круговую поверхность А, переходящую в упорную поверхность П, будет происходить при помощи шлицевого соединения 50. Аналогично конструктивное исполнение с водилом 4. Один из вариантов или пример подсоединения гидроцилиндра 45 к подвижным частям кулачка 3 приведен на фиг.3. Здесь за основу взят кулачковый механизм с переменным профилем кулачка 2962 /И.И. Артоболевский, Механизмы в современной технике, Москва, Наука, 1981, Том 5, с. 101/, где гидроцилиндр 45 вращается вместе с кулачком 3, а лепестки 51 занимают различные положения в зависимости от хода штока гидроцилиндра 45. При этом сам круговой диск кулачка 3 со сквозными отверстиями О /для монтажа гидротрубопроводов/ может выполнять роль поверхности А, если лепестки 51 уберутся заподлицо, т.е. толкатель 14 не будет совершать возвратно-поступательных движений.
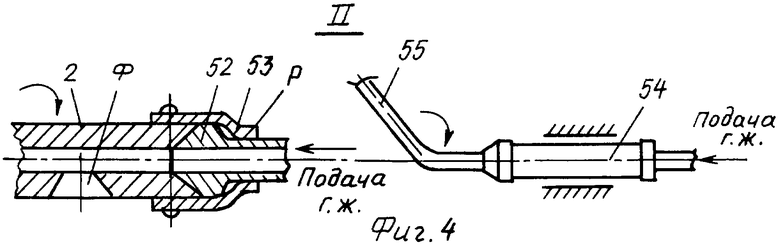
На фиг.4 изображены некоторые упрощенные конструктивные особенности подвода гидрожидкости по трубопроводам. Поскольку для осуществления возвратно-поступательных движений штока гидроцилиндра 45 необходимо 2 точки подачи, то подача гидрожидкости в нижнюю точку совпадает с осью вращения ведущего вала 2, при этом он выполнен соответственно полым, и герметически надежное конусное сопряжение наконечника 52, который неподвижен относительно вращающегося вала 2 и с которым он сопрягается, фиксируется обоймой 53, обжимаемой по поверхности Р. Для подачи гидрожидкости в верхнюю точку гидроцилиндра 45 также необходима соосность, при этом конусное сопряжение, как и в первом случае, должно быть с соответствующим подбором марок контактирующих материалов. Подача осуществляется через переходную втулку 54 и далее трубопровод 55, располагаемый вверх к верхней точке подачи гидрожидкости. Для задействования второго гидроцилиндра 45 (см. фиг.3), его нижней точки подачи, на ведущем валу 2 имеется конусное отверстие Ф, к которому в принципе возможно подсоединить трубопровод и через сквозное отверстие О вывести его к нижней точке подачи гидрожидкости второму гидроцилиндру 45. Для подача в верхнюю точку гидрожидкости второму гидроцилиндру 45 на трубопроводе 55 может быть установлен /условно не показан/ переходник, через который вторым его ответвлением трубопровода 55, также аналогично нижней точке, через отверстие в кулачке 3 возможно будет вывести на верхнюю точку подачу гидрожидкости второму гидроцилиндру 45. Здесь возможны и другие известные /не конусные/ конструктивные особенности стыковки, например, с уплотнительными резиновыми кольцами.
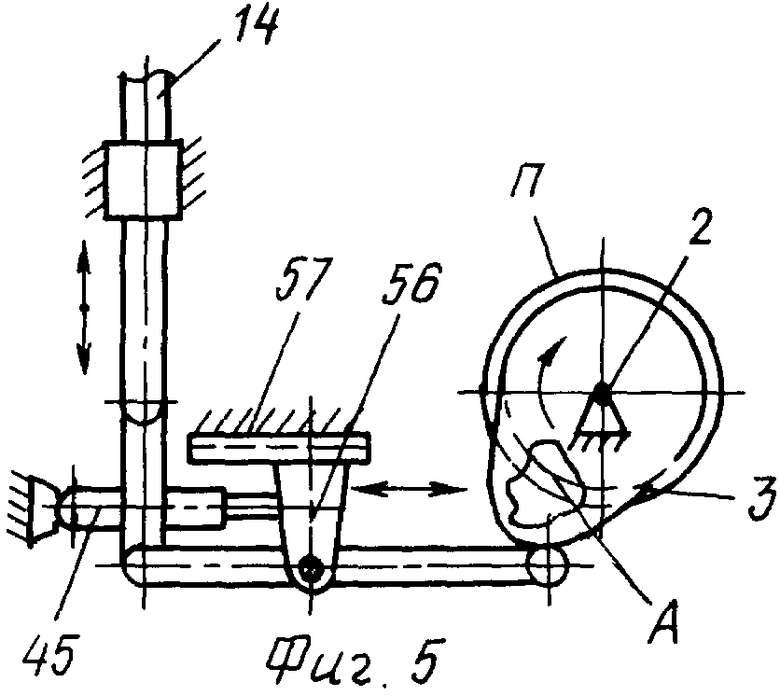
На фиг. 5 приведена другая возможная принципиальная схема кулачкового-рычажного механизма с изменяемым законом движения выходного звена 3055 /И.И. Артоболевский, Механизмы в современной технике, Москва, Наука, 1981, Том 5, с. 161/. Здесь работой гидроцилиндра 45, его возвратно-поступательными движениями штока, может меняться положение оси М стойки 56 относительно оси N, тем самым будет изменяться закон движения толкателя 14 /здесь он больше выполняет роль ползуна/. Стойка 56 может совершать возвратно-поступательные движения в направляющей опоре 57. Из схемы фиг.5 видно, что подача гидрожидкости к гидроцилиндру 45 не представляет никаких затруднений.
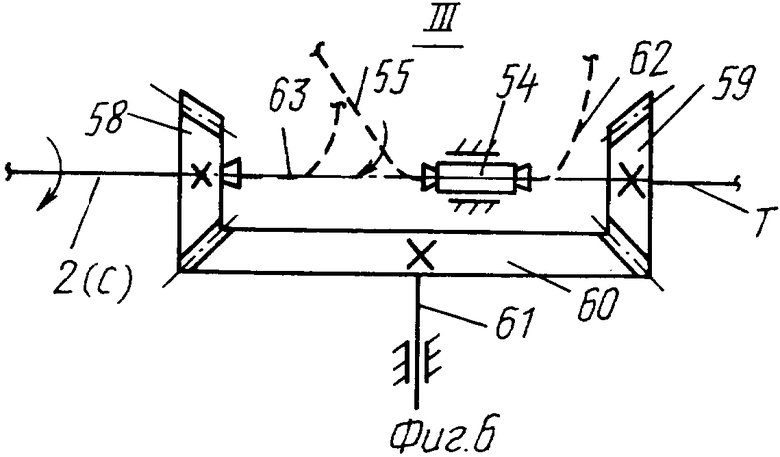
На фиг.6 приводится принципиальная схема подачи гидрожидкости в гидроцилиндры 45 кулачка 3, который находится в середине ведущего вала 2 (для варианта исполнения согласно фиг.3). Для этого ведущий вал 2 разделяется на две части С и Т коническим зубчатым зацеплением, состоящим из колес 58, 59, 60, причем колесо 60 закреплено на вертикальном промежуточном валу 61. Подвод гидрожидкости по трубопроводам 62 и 63 осуществляется аналогично фиг.4. /все гидротрубопроводы 55, 62 и 63 показаны прерывистыми линиями/.
Подвод гидрожидкости в нижнюю точку гидроцилиндра 45 и соответственно выполнение ведущего вала 2 полым /см. фиг.4 и 8/ было приведено для того, чтобы несколько уменьшить прокладку трубопроводов /монтаж/ с внешней стороны, как, например, в случае с верхними точками, т.к. они /трубопроводы/ возможно будут мешать при конструировании, хотя понятно, что их можно было бы проложить аналогично как в случае с верхними точками, только чуть ниже, используя ту же втулку 54 для верхней и нижней точек, но с переходником на трубопроводе 55 и дроссельными заслонками /разделение на две ветви - нижняя и верхняя точки/.
В принципе вспомогательный регулируемый привод 44 для задействования подвижных регулируемых частей в предлагаемом механизме может быть использован любой, но более для данной принципиальной схемы /см. фиг.1/ подойдет гидропривод, который с успехом в разных вариантах применяется в робототехнических устройствах из-за хороших регулировочных, маневренных способностей и простоты автоматического регулирования. Например, в приводах промышленных роботов часто используют гидропривод с дроссельным регулированием, упрощенная схема которого приведена на фиг.7 и в состав которого, помимо гидроцилиндров 45, входят гидробак 64, трубопроводы 65 /гибкие или жесткие/, направляющий гидрораспределитель 66, насос 67, входной вал которого связан с промежуточным валом 43, т.е. гидропривод 44 кинематически связан с ведущим валом 2 или подразумевается, что с основным приводом. Роль входного параметра, управляющего процессом преобразования энергии, здесь выполняет дроссельная заслонка 68 или регулируемый дроссель, конструкции которых разнообразны. Регулятор давления 69 поддерживает постоянное давление питания перед дросселем 68, позиция 70 - фильтр, а позиция 71 - переходник-крестовина, из которого отходят ветви Е и Г, которые служат для увеличения контуров, т. е. для увеличения количества гидроцилиндров 45. Здесь понятно, что количество и расположение вышеупомянутых элементов на схеме фиг.7 может быть разное, также возможно использование различных видов следующих систем.
Механизм преобразования вращательного движения в прерывистое вращательное и возвратно-поступательное работает следующим образом. Сразу заметим, что движения всех звеньев в предлагаемой гидромеханической системе должны быть согласованно-регулируемыми, т. е. необходимо использование принципа программного управления, ведь движения исполнительного органа 24 будут напоминать движения руки человека /достаточно сложные/ с учетом того, что в процессе работы эти движения могут существенно меняться /траектория/ по сигналу управляющей ЭВМ. Кстати, само название предлагаемого изобретения довольно скупо отражает высокие кинематические возможности данной системы. Заложенный в формулу /см. далее/ фрагмент текста: "...вспомогательным регулируемым приводом" означает емкое всеобъемлющее понятие или толкование с учетом вышесказанного, т. е. применение программного управления. Существуют, например, разнообразные комплексы программ /А.А. Суханов, А.О. Рябов и др. Ленинградский политехнический институт им. М.И. Калинина, ВЦ, 1987г., 40с./, где первая программа предназначена для расчета кинематических параметров системы, которая представляется как структура в виде древовидного ориентированного графа и которая может быть использована для данного случая. Вторая программа предназначается для определения обобщенных движущих сил и реакций в кинематических парах, при этом первая программа используется уже как подпрограмма. Третья программа предназначается для определения квазистатических составляющих динамических ошибок, при этом также вторая программа здесь является подпрограммой для третьей программы. Выходными параметрами являются фактические значения обобщенных координат и квазистатические динамические ошибки. В общем задача определения законов движения сводится к решению системы дифференциальных уравнений движения, методика решения которых достаточно разработана и известна, например, рекомендации из книги /М. З. Коловский, А.В. Слоущ. Основы динамики промышленных роботов, М.: Наука, 1988, с. 226-233/.
Вкратце сущность предлагаемого метода заключается в том, чтобы искать частное решение /определенное движение исполнительного звена 24/ с помощью рекуррентных соотношений для построения процесса последовательных приближений, чтобы высокочастотные компоненты отфильтровались, при этом низкочастотная аппроксимация решения получается на ЭВМ с помощью сплайн-функций, при выборе определенного количества опорных точек на данном интервале времени с применением интегралов Дюамеля получают рекуррентные соотношения, т.е., проще говоря, возможный набор траекторий движения исполнительного звена 24.
В качестве основного двигателя, наличие которого в принципе подразумевается /или основного привода/ и который приводит в движение ведущий вал 2, может быть использован роторный электродвигатель постоянного тока с независимым возбуждением, где управляющим входным параметром является подводимое к якорю напряжение или асинхронный электродвигатель переменного тока, где система управления скоростей асинхронного двигателя основана на изменении частоты питающего тока. Итак, ведущий вал 2 сообщает вращательное движение кулачкам 3 и водилу 4, при этом толкатель 14 совершает прерывистое возвратно-поступательное движение, а мальтийский крест 6 и промежуточный вал 7 - прерывистое вращательное движение. Толкатель 14 увлекает за собой ведомый вал 10, связанный с ним с помощью шлицевого соединения 12, сообщает прерывистое вращательное движение. Далее колесо 33, кинематически связанное с ведущим валом 2, приводит во вращательное движение колесо 34 с толкателем 37, который, взаимодействуя через шарик 38 с многопрофильным кулачком 23, вынуждает исполнительный вал 24, связанный с ведомым валом 11 муфтой Гука 25, совершать еще и поперечные движения в разные стороны наряду с возвратно-поступательными и прерывисто-вращательными движениями. Заметим, что гидропривод вступает в работу только тогда, когда нужно изменить траекторию движения исполнительного звена 24, т.е. до изменения траектории направляющие гидрораспределители 66 находятся в нейтральном положение по всем контурам; в итоге гидрожидкость через фильтр 70 снова поступает в гидробак 64.
В другом случае штоки гидропилиндров 45 вступают в работу, задействуя подвижные части: втулку 46, выводя тем самым толкатель 14 на круговую поверхность А кулачка 3 в соответствии с согласованным его поворотом на нужный угол, перемещая стойку 56, или, если установлены кулачки 3 согласно фиг.3, то лепестки 51. Понятно, что возможно в этой схеме применение и множества других разнообразных кулачковых и мальтийских механизмов. Также в возвратно-поступательном движении гидроцилиндр 45 задействует колеса 21 и 22, тем самым добиваясь от исполнительного вала 24 разнообразных траекторий движения. В итоге исполнительный вал 24 совершает возвратно-поступательное, прерывисто-вращательное, возвратно-поперечные /по всем направлениям/ движения в различных наложениях, разнообразных траекториях и диапазонах в зависимости от конструктивных особенностей. Если гидропривод 44 не будет соединен кинематически с ведущим валом 2 /основным приводом/, а будет работать от другого источника энергии и будет выполнять соответственно те же функции, то это заметно расширит диапазон регулирования предлагаемого механизма. Заметим, что все элементы в механизме достаточно известны, технологичны, т.е. их можно изготовить с достаточно высокой точностью.
В итоге имеем, что предлагаемый механизм /гидромеханическая передача/ для робототехнического устройства вобрал в себя все преимущества манипуляторов, работающих без программного управления над роботами, - это надежность и минимум погрешностей при работе, ведь в роботах для получения минимума погрешностей используются сложные дорогостоящие следящие системы на приводах, что ведет к отказам в работе. Предлагаемая система будет работать эффективно с минимумом погрешностей как со следящей системой на приводе /или двух приводах/, так и без нее.
Понятно, что данная система может работать и в режиме автооператора /без программного управления/, т. е. для получения другой траектории движения исполнительного органа необходимо будет делать остановку и осуществлять соответствующую переналадку, поэтому в формуле изобретения отсутствует упоминание, что регулировка происходит в процессе работы системы /в режиме робота с программным управлением/ для расширения юридических границ.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1987 |
|
SU1471724A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1991 |
|
SU1825057A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| БИБЛИОТЕКА | 1973 |
|
SU368696A1 |
| Устройство для прессования порошковых материалов | 1991 |
|
SU1834811A3 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1982 |
|
SU1055932A1 |
| УДАРНЫЙ МЕХАНИЗМ | 2015 |
|
RU2610320C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Механизм для прерывистого вращения рабочего объекта | 1978 |
|
SU1010360A1 |

Изобретение относится к машиностроению и может быть использовано в качестве гидромеханической системы для робототехнического устройства в промышленности, например в гибких автоматизированных производствах. Механизм включает корпус, в котором размещены два кинематически связанных между собой промежуточных вала, на одном из которых размещен мальтийский крест. Ведомый вал подпружинен к корпусу и соединен со вторым промежуточным валом с возможностью их относительного перемещения, причем ведомый вал выполнен из двух частей, соединненых между собой муфтой Гука. Механизм снабжен кинетически связанным с ведущим валом дополнительным кулачком, толкатель которого шарнирно связан с ведомым валом и толкатель дополнительного кулачка имеет возможность совершать вращательное движение вокруг оси ведомого вала. Причем этот толкатель закреплен на кинематическом элементе, а дополнительный кулачок выполнен охватывающим по отношению оси ведомого вала. Ведущий вал кинетически связан с установленным в корпусе вспомогательным регулируемым приводом, одно из выходных звеньев которого кинематически соединено с дополнительным кулачком. Дополнительный кулачок имеет возможность совершать возвратно-поступательные движения вдоль оси ведомого вала за счет телескопически выполненных и кинематически соединенных валов. На одном из этих валов закреплен дополнительный кулачок, а на другом - кинематический элемент, кинематически связанный с ведущим валом. В свою очередь, другие выходные звенья соединены с кулачком и толкателем при выполнении последних регулируемыми, причем эти выходные звенья соединены с их подвижными частями, при помощи которых и происходит регулировка в процессе работы механизма. Водило и кулачок связаны с втулками, имеющими возможность перемещаться с кулачком и водилом за счет следующих выходных звеньев вдоль оси ведущего вала, обеспечивая тем самым вход или выход толкателя на круговую поверхность, соединенную с кулачком, а также расцепляя и сопрягая палец водила с мальтийским крестом. Указанное выполнение механизма обеспечивает возможность его использования в качестве гидромеханической системы перепрограммируемого робота, работающего в режиме автооператора. 1 з.п.ф-лы, 7 ил.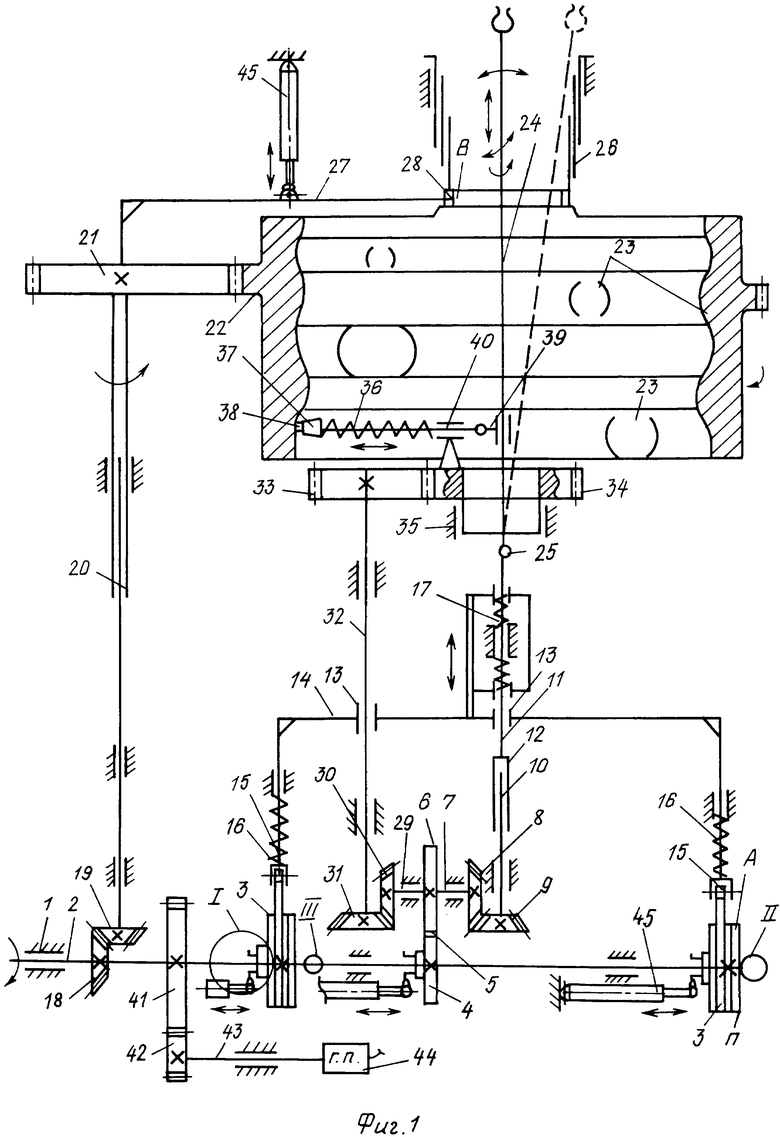
| Манипулятор | 1985 |
|
SU1295105A1 |
| Резец для разрушения угля и других горных пород | 1972 |
|
SU495437A1 |
| Устройство для преобразования вращательного движения в колебательное | 1987 |
|
SU1483139A1 |
| US 3820407 28.06.1974. | |||

