I .
Изобретение относится к оборудованию для сварки и воздействия на кристаллическую структуру металла сварного шва без повышения температуры изделия, в частности к устроййтвам для снижения остаточных сварю.чнь1х напряжений ви гщион- ным методом, и может быть использовано во всех областях машиностроения для обработки нагруженных сварочных конструкций с целью увеличения их несущей способности за счет снижения остаточных сварочных напряжений.
Известны устройства для автома ического регулирования резонансных машин, которые поддерживают постоянно-заданную амплитуду колебаний на восходящей ветви амплитудно-частотной характеристики (резонансной кривой).
Однако по достижении резонансной частоты сист ела работает неустойчиво йэ-за резкого смещения рабочей точки по нирходящей ветви характеристики, что требует вначале значительного снижения частоты вынуждающей силы, а затем повышения
2
частоты для выхода на заранее заданное значение.
Наиболее близким техническим решением к данному изобретению является устройство для снижения остаточных сварочных напряжений, содержащее вибратор с регулируемым приводом, датчик амплитуды колебания изделия, датчик частоты колебаний вибратора, аналого-цифровой преобразователь, вычислительный блок и
блок управления, связанный с регулируемым приводом.
Известные устройства могут поддерживать колебания изделия с постоянной, наперед заданной величиной частоты, однако .они не поддержать достигнутого экстремального значения амплитуды резонансных колебаний в процессе непрерывного изменения собственной частоты копебаний изделия, что не обеспечивает наиболее эффективного снижения сварочных напряжений при наименьших затратах мощности приводного двигателя.
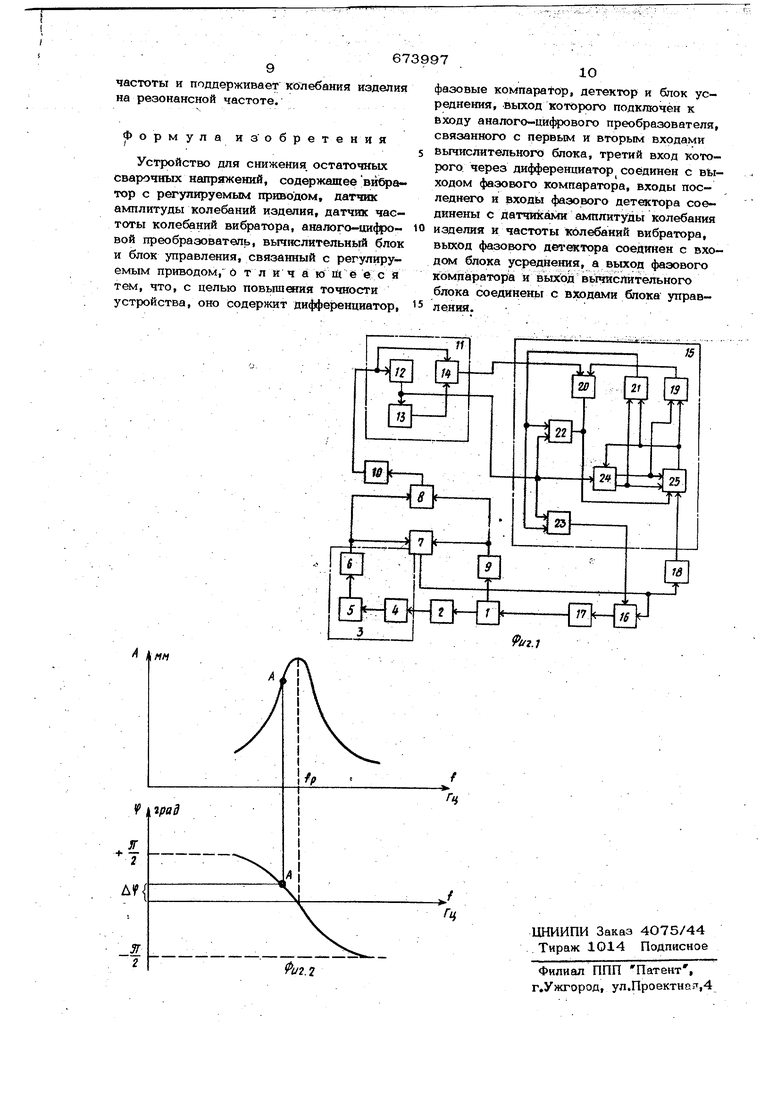
673997 Цель иэобретеш1Я - повышение точности устройства. . В предлагаемом устройстве определение момента достижения экстремального значения амплитуды резонансных колебаний и поддерживания экстремального значения амплитуды осуществляется за счет измерения величины и знака фазового сдвига между вынуждающей силой и вынужденными колебаниями изделия и преобразования этой величины в управляющий сигнал в цифровой формедля блока управления приводом вибратора. Для этого устройство содержит дифференциатор, фазовые компаратор детектор и блок усреднения, выход которгопайклю ,чен к входу аналого-цифрового преобразователя, связанного с первым и вторым входами вычислительного блока, третийвход которого через, дифференциатор соединён с выходом фазового компаратора, входы последнего и входы фазового детектора соединены с датчиками амплитуды колебания изделия и частоты колебаний вибратора, выход фазового детектора соедйнён с входом блока усреднения, а выход фазовогс компаратора и выход вычислительного устройства соединены с входами блока управления. На фиг. 1 изображена блок-схема пред лагаемого устройства; на фиг. 2 - ампли- тудЧю-частотная и фазочастотная характ0- ристики изделия, где А - амплитуда колебаний изделия; tp - сдвиг фаз между вынуждающей силой и вынужденными колебаниями; f- частота колебаний. Вибратор 1 за7{репляется при помощи специального приспособления на изделие .2, которое необходимо подвергнуть виорообработке, на изделии также Vcтaнoвлeн датчик амплитуды 3, состоящий из чувствительного эл.емента 4, усилителя 5, и формирователь 6 импульсов, датчик 3 соединен с фазовым компаратором 7 и фазовым детектором 8, другие входы последних соединены с датчиком 9 частоты колебаний вибратора. Фазовый детектор 8 соединен через блок усреднения 10 с аналого-цифровым преобразователем 11 (АЦП), состоящим из управляемого генератора 12, прямоугольных импульсов, генератора 13 пилообразного напряжения и нуль-органа 14, средине|ННЬ1е пос/1едовательно, кроме того, вход генератора 12 соединен с другим входом нуль-органа 14 Выход генератора 12 (частотный выход нреобразователя 11) подключен к такти- рующему вхоЭу вычислительного блока 15,
Sffi:-:-,- -. изК ерительный вход этого блока подключен к выходу нуль-органа 14, который является частотным выходом аналого-ци4 рового преобразователя 11. Входы блока управления 16 шаговым регулируемым приводом 17 соединены с вычислительным блоком 15 и фазовым компаратором 7. Регулируемый привод 17 электрически соединен с блоком управления 16 и подключен к якорной цепи приводного двигателя вибратора 1. Дифференциатор 18 включен между фазовььм компаратором 7 и входом ;вычислительного блока 15. Вычислительный блок 15 состоит из ключей 19 - 23, представлющих србой обьгчные схемы совпадения, триггера управления 24 и реверсивного счетчика 25, Вход ключа 19 соединен с выходом реверсивного счетчика 25 и с выходом триггера управления 24, а выход ключа 19 с из входов ключа 2О, другчэй вход которого соединен с широтным выходом Aim 11. Один вход ключа 21 соединен с выходом реверсивного счетчика 25 и одним из входов триггера управления 24, а другой вход - с выходом триггера управления 24 и входом реверсивного счетчика 25. Выход ключа 21 соединен с одним из входоб тшючей 22 и 23, а другой вход ключей 22 к 23 и триггера управления 24 соединен с частотным выходом АШ 11. Выходы триггера управ тения 24 соединены с входами реверсивного считчика 25, а другие входы реверсивного счетчика 25 соединены с выходами ключей 22 и 2О и дифференциатором 18. Устройство работает следующим обраПри включении установки на двигатель вибратора 1 с регулируемого привода 17 подается напряжение, соответствующее какому-то произвольному значению частоты вращения из диапазона рабочих частот, равного 10-150 Гц, при этом двигатель вибратора 1 начинает вращаться и создавать вынуждающую сипу. Одновременно с запуском на вычислительный блок 15 поступает команда сброс, переводящая все случайно установленные значения триггеров реверсивного счетчика 25 в нулевое состояние, при обратная связь, воздействующая на триггер управления 24, переводит етх) в режим записи, и ключ 19 выдает на раарешенгие-записи на ключ 20, переводя его в состояние, гфи котором он сможет пропустить пачку импульсов с широтного выхода АЦП 11, а ключ 21 выдает комавду на запирание ключей 22 и 23. За первый оборот двигателя вибратора 1 фазовый компаратор 7 и фазовый детектор 3 вырабатывают сигналы о наличии положительного сдвига фаз между вынуждающей силой и вынужденными колебаниям поскольку очевидно, что при разгоне двигателя вибратора от нуля частота толкающих усилий ниже частоты резонанса колебаний изделия, подвергаемого виброобработке.. Допустим, что точка А (фиг. 2) соответствует рабочей точке на резонансных амплитудной и фазовой частотных характе ристиках изделия, при этом электродвигатель вибратора 1 создает вынуждающую силу, частота которой ниже резонансной частоты изделия и фазовый сдвиг между : вынуждающей силой и вынужденными колеб ниями положителен. . Информапия о амплитуде и частоте виб рации снимается с датчиков 3 и 9. Датчи 3 генерирует сигналы, пропорциональные амплитуде виброперемещения, а частота равна частоте вибрации изделия 2, создаваемого вибратором. Датчик 9 генерирует npsAioyronbHbie импульсы с частотой вращения двигателя, т.е. с частотой вынуждающей силы, причем фаза этих импульсо соответствует фазе вынуждающей силы, Сформированные сигналы датчиков 3 и 9 поступают на выходы фазового детектора 8 и фазового компаратора 7. Фазовый детектор 8 определяет величину фазового угла рассогласования и преобразует его на выходе в виде щиротно-модулированных импульсов. Эти импульсы блоком усреднения 10 преобразуются в постоянное напряжение, пропорциональное фазовому сдвигу, фазовый компаратор 7 определяет знак фазового сдвира и тем самым опредетьяет нал- равление вращения шагового регулируемого привода через блок управления 16. Положительный сдвиг фаз вызывает увеличение скорости вращения двигателя вибратора, и тем самым, увеличение частоты вынуждающей силы, а отрицательный снижение скорости вращения двигателя и частоты вынуждающей силы. С выхода блока усреднения 10 постоян ное напряжение, пропорциональное разности фаз {вынуждающей силы и вынужденны колебаний) подается на входы управляемо го генератора 12 прямоугольнУх импуль- 6 7 сов и пуль-органп 1.Л ЛИП 1J. Частотч импульсов управляемого гопоратора Л 2 пропорциопальна этой paonocTvi ijma ti и-мменяется в диапазоне Т-10 Гц, т.о. при разности фаз, равной нулю, упрш ляомг.и генератор 12 прямоугольных 1Г шульсов вьфабатывает последовательность кмпул сов с частотой 1 Ги, а при максималЕ.пой разности фаз, равной -s,- с частотой -J . 10 Гц. Генератор 12 управляет работой генератора 13 пилообразного напряч егшя и вычислительного блока 15, обеспечивая работу всего устройства в двухтактгюм режиме: такт измерения, такт отработки рассогласования, при этом вдали от ро-. зонанса частота следования тактов увеличена, а с приближением резотгпнса - заМеддена, потому, что величина фазового угла рассогласования больще вдали от р: зонанса и уменьшается при приближении к резонацсу. Генератор 13 пилообразного напряжения работает в ждущем режиме и запускается импульсами управляемого генератора 12. Выходные пилообразные импульсы, тлеющие длительность 5 мс подаются на один из входов нуль-органа 14, на входе которого непрерывно присутствует постоянное напряжение, пропорциональное фазовому сдвигу. Нуль-орган 4 производит уравнение двух напряжений по амплитуде. Часть периода, в течение которого амплитуда пилообразного напряжения провьпиает постоянное напряжентш с блока усреднения 1О, преобразуется в соответствующее количество импульсов. Частота выходных импульсов нуль-органа 14 постоянна и равна 10О Гц. Таким образом, на выходе аналого-цифрового преобразователя 11 появляется последовательность пачек импульсов, где частота следования пачек и щирина пачки, ,а, следовательно, и количество импульсов в ней прямопрюпорциональны фазовому сдвигу между вынуждающей силой и вынужденными колебаниями. Одна из пачок заносится в вычислительный блок 15. Происходит запись, и запоминание фазового сдвига в. цифровой форме. В режиме записи количество импульсов С нуль-органа 14, соответствующее фазовому сдвигу между вынуждающей силой и вынужденными колебаниями и, следовательно, величине ухода частоты колебаний от частоты резонанса, через ключ 20 заносится в реверсивный счетчик 25, Записг, пачки импульсов производится при нпличигт разрешающего потенциала с выхода ключа 19, включенного на входе ключа 20. При поступлении импульса с ген атора 12, . который считал последн й из занесенных импульсов в реверсивный 25, этот счетчик вьщаёт разрешающи сигнал на ключи 19 и 21, а триггер управления 24 перебрасывает в состояние, соответствующее такту измерения, при эт триггер управления 24 вьщаёт сигнал на ключ 21 и реверсивный счетчик St5, подготовив его к записи пачки импугаэсов. Ключ 21, на входе которого имеются сигналы об освобо,ждении реверсивного счетчика 25 и переводе триггера управле ния 24 в режим записи, вьщаёт сигнал на ключи 22 и 23, закрывая их и предотвра щая прохождение импульсов на вхбд считы вания реверсивного счетчика 25 н блока управления 16. Пачка импульсов с широтного выхода АЦП 11 через ключ 2О 3iaносится в реверсивный 25, причем изменяется состояние триггера управления 24, ключей 19 и 21, так же ключей 22 и 23, которые получают разрешаю щий сигнал. Счить1вание информации производится импульсами управляемого генератора 12, koTOpbie поступают на вход реверсивного счетчика 25 ключ 22 и на блок управления 16 через ключ 23. Полярность напряжения на электродвигателе вифатора 1 определяется фазовьтм компаратором 7. Одновременно с этим, импульсы счргывания через ключ 22 поступают на реверсивный счетчик 25, уменьЦйя количество записанных в нем импульсов на i при пос туплении каждого послепуюшего импульса от генератора 12. Таким образом, вдали от резонанса, когда фазовый сдвиг между вынуждающей силой и вынужденными колебаниями отрёмится к - , частота импульсов генератора 12 высокая - 10 Гц, и отработка производится быст|рЬ. При приближе1ши к резонансу количество. Импульсов, записываемых в с«1етчике 25, и частота импульсов генератора 12 уменьшаются, следовательно, снижается и скорость отработки, что повышает динамические свойства системы регулирования.™..,-. . . - - - ; -- - - - При считывании последнего импульса производится новый такт измерения и за писи, при котором новая серия импульсов с нуль-органа 14 заносится в рев рсивнь1Й счетчик 25 вычислительного блока 15. Когда при считывании записанной информации резонансная частота изменяется таким образом, что часть записанной инфорк йции становится излишней, т.е. резонанс достигается за меньшее число импульсов . отработки шаговым двигателем, тогда при перебросе выходного сигнала фазового компаратора 7 дифференциатор 18 вырабатывает импульс, стирающий в вычислительном блоке 15 записанную информацию, и дальнейшая обработка не происходит. По достижении резонанса вынужденные колебания изделия совпадают по фазе с вынуждающей силой вибратора, при этом напряжение на выходе фазового детектора 8 отсутствует, а следовательно с частотного выхода АЦП 11 идут импульсы генератора 12 с частотой 1 Гц, а на широтном выходе сигнал отсутствует. Однако импульс генератора 12 не проходит через ключ 23 на вход блока управления приводом вибратора, поскольку на втором входе ключа 23 отсутствует разрещаю ший потенциал ключа 21. Вычислительный блок 15 продолжает находиться в рюжиме записи, поскольку в реверсивный счетчик 25 не заносятся никакие импульсы, а обратйая связь на триггер управления 24 удерживает его в такте записи. Следовательно, экстремальные колебания изделия поддерживаются по фазовым соотНОШ0НИЯМ между вынуждающей силой и вынужденньтми кол аниями. При смадении частоты резонанса изделия появляется фазовый сдвиг между вынуждающей сидой и вынужденными колебаниями,, и устройство опять стремится совместить Ч(астоту вьшуждаюшей силы с собственной частотой изделия. ..: . .-.- - . Если в процессе вифообработки изде;лия резонансная частота последнего изме- нится таким , что рабочая точка системы пералетцается на спадающий склон амплитудно-частотной характеристики, то ри этом знак фазового сдвига между вынуждающей силой и вынужденными колебани$1ми станет отрицательным, и фазовый компаратор 7 вьфаботает сигнал на .изменение направления вращения привода 17, а следовательно, на снижение напряжения на двигатель вифатора 1, т.е. на снижение частоты вынуждающей силы. Устройство автоматически обеспечивает поиск резонансной частоты по минимуму фазового сдвига рассогласования входных сигналов датчика амплитуды и датчика
частоты и поддерживает колебания изделия на резонансной частоте.
ула изобретения
Ф о
р м
Устройство для снижения остаточных сварочных напряжений, содержащее вибратор с регулируемым приводом, датчик амплитуды колебаний изделия, датчик частоты колебаний вибратора, аналого-цифровой преобразователь, вычислительный блок и блок управления, связанный с регулируемым приводом, 6 т л Ич а к) щ ё ее я тем, что, с целью повьппа ия точности устройства, оно содержит дифференциатор.
фазовые компаратор, детектор и блок усреднения, выход которого подключён к входу аналого-цифрового преобразователя, связанного с первым и вторым входами
вычислительного блока, третий вход которого через дифференциатор соединен с выходом фазового компаратора, входы последнего и входы фазового детектора соединены с датчиками амплитуйы колебания
изделия и частоты колебаний вибратора, выход фазового детектора соединен с входе блока усреднения, а вьрсод фазового компаратор а и выход вьгаислительного блока соединеньг с входами блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для виброиспытаний | 1985 |
|
SU1397763A1 |
| Устройство для контроля качества материалов и изделий | 1988 |
|
SU1642367A1 |
| Устройство для виброиспытаний | 1982 |
|
SU1097902A1 |
| Устройство для виброиспытаний | 1986 |
|
SU1441222A1 |
| Способ снятия остаточных напряжений в металлических конструкциях и устройство для его осуществления | 1987 |
|
SU1474175A1 |
| АППАРАТ КОРИОЛИСОВА ТИПА ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ЖИДКОГО ПОТОКА | 1993 |
|
RU2113692C1 |
| Устройство для виброиспытаний | 1985 |
|
SU1244529A1 |
| Устройство для получения дисперсных систем в жидкой среде | 1986 |
|
SU1428449A1 |
| Ультразвуковой расходомер | 1984 |
|
SU1245887A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 2009 |
|
RU2399039C1 |
