Изобретение относится к устройству Кориолисова типа для измерения массового расхода жидкого потока, т.е. потока жидкости или газа, содержащему по меньшей мере одну трубу, совершающую колебания с резонансной частотой в поперечном относительно потока направлении при протекании потока через трубу.
Устройства для измерения массового расхода, использующие эффект силы Кориолиса, основаны на физическом феномене, заключающемся в том, что сила Кориолиса воздействует на трубу, если последняя совершает колебания в направлении, перпендикулярном направлению потока через трубу. Величина силы Кориолиса зависит от угловой скорости вибрации и массового расхода. Сила Кориолиса имеет периодический характер с частотой, равной частоте вибрации. Как следствие, при движении возникает сдвиг по фазе (время запаздывания), если трубка, закрепленная в двух точках, совершает колебания в своей средней части между двумя опорами и движение измеряется датчиками в двух точках, расположенных симметрично по обеим сторонам от центра, что дает в результате наложение сил вибрации и сил Кориолиса, пропорциональных массовому расходу. Блоки обработки сигналов измерителей массового расхода вычисляют массовый расход на основе сигналов датчиковых устройств, расположенных симметрично. Конструкция и эксплуатационные характеристики устройств измерения массового расхода Кориолисова типа тесно связаны с применяемой конструкцией трубопроводного узла.
Информация о массовом расходе всегда передается посредством вызванной силой Кориолиса составляющей электрического сигнала, поступающего от датчиков, расположенных симметрично относительно центра трубы. Блок обработки сигнала измеряет либо эту конкретную составляющую, либо другой параметр, зависящий от нее. К числу таких параметров относится, например, время запаздывания между двумя сигналами, интеграл от абсолютных значений разностей сигнала за определенное число полных периодов и т.п.
Блоки обработки сигнала такого типа описаны в патенте Великобритании N 2,171,200, патенте США N 4,879,911, патенте Венгрии N 200,234, Международной Заявке на Патент N WO 88/03264 и патентах США N 4,655,089 и N 4,996,871.
Устройство, описанное в патенте Великобритании N 2,171,200, связано с трубопроводным узлом, содержащим две прямые параллельные друг другу трубы. Эффект влияния продольных (осевых) напряжений, возникающих при вибрации прямых отрезков трубопровода, устраняется возбуждением колебаний с собственной резонансной частотой и частотой ее третьей гармоники одновременно, при этом используется свойство пары параллельных труб, заключающееся в том, что отношение собственной частоты системы к ее третьей гармонике несет информацию об осевых напряжениях. В первом подходе массовый расход будет определяться на основе фазовой разности, полученной у собственной частоты, и, затем, полученный таким образом результат будет скорректирован путем учета измеренного отношения собственной частоты к ее третьей гармонике.
Устройство, описанное в патенте США N 4,879,911, сводит задачу измерения к измерению разности во времени. С помощью аналогового интегрирования сигналов датчиков получают опорный сигнал и измеренный сигнал, пропорциональный смещению. Сравнивая эти сигналы с симметричными относительно нуля опорными напряжениями, получают временные селекторы, содержащие запаздывание во времени между сигналами с различными знаками. Суммируя временные селекторы с соответствующими знаками, получают запаздывание во времени между сигналами, которое пропорционально массовому расходу.
Устройство, описанное в патенте Венгрии N 200,234, использует интегральные значения сигналов датчиков для вычисления массового расхода.
С добавлением частотной составляющей, связанной с вызванной силой Кориолиса деформацией, к управляющему сигналу влияние силы Кориолиса будет значительно усилено. Это использовано в устройстве, описанном в Международной Заявке на Патент N WO 88/03261, в котором применяются четыре независимых приводных и чувствительных элемента. Сигнал, вызванный силой Кориолиса, и несущий сигнал, содержащиеся в комплексных входных сигналах, разделяются с помощью синхронных выпрямителей, и массовый расход вычисляется на основе отношения этих двух составляющих сигналов.
Устройство, описанное в патенте США N 4,655,089, использует интегратор вместе с конденсаторами для получения сигналов, пропорциональных смещению. Полученные таким образом сигналы подаются на компаратор напряжений, каждый с различным опорным сигналом, управляющим фазовым компаратором. Фазовый компаратор устанавливает выходные напряжения цифроаналоговых преобразователей через цифровой счетчик так, чтобы получить нулевое (или постоянное) время запаздывания на входе фазового компаратора, используя при этом указанные выходные напряжения в качестве опорных для указанных компараторов. Как только достигается равновесие, разность между управляющими кодами цифроаналоговых преобразователей будет пропорциональна массовому расходу.
В патенте США N 4,996,871 описан денсиметр Кориолиса, принцип действия которого основан на измерении коэффициента массового расхода посредством определения разности фаз между действительной и мнимой частями дискретного преобразования Фурье для сигналов двух датчиков скорости, прикрепленных к вибрирующим трубам. Аналоговые сигналы датчиков мультиплексируют, фильтруют с помощью фильтра защиты от наложения спектров нижних частот и преобразовывают в цифровую форму для того, чтобы осуществить дискретное преобразование Фурье. В альтернативном варианте разделяющий фильтр может быть установлен перед мультиплексором для каждого из двух входных сигналов скорости вместо фильтра защиты от наложения спектров. К сожалению, использование таких фильтров может дать результатом ошибку измерения, так как их характеристики меняются при изменениях температуры, что оказывает влияние на фазы измеряемого сигнала. Более того, в описываемом устройстве выборки двух сигналов перемежают друг друга, т.е. они не могут быть дискретизированы одновременно. Указанный фазовый сдвиг может быть компенсирован, что достаточно сложно осуществимо и приводит к накоплению ошибки измерения.
Целью изобретения является создание усовершенствованного прибора Кориолисова типа для измерения массового расхода, использующего преобразование Фурье для определения массового расхода.
Таким образом, предметом настоящего изобретения является устройство Кориолисова типа для измерения массового расхода жидкого потока, т.е. потока жидкости или газа, содержащего по меньшей мере одну трубу, совершающую колебания с резонансной частотой в поперечном относительно потока жидкости или газа направлении при протекании потока через трубу, два датчика для получения аналоговых сигналов, соответствующих перемещению трубы, и средства обработки сигналов для определения временной разности между указанными аналоговыми сигналами, содержащие средства для преобразования указанных аналоговых сигналов в серии цифровых сигналов и средства для вычисления из серий цифровых сигналов разности во времени с помощью преобразования Фурье. Согласно изобретению, каждый из аналоговых сигналов, возникающих на датчиках, преобразовывается в серию цифровых сигналов с помощью аналого-цифрового преобразователя приращений, содержащего компаратор, реверсивный счетчик и цифроаналоговый преобразователь, причем реверсивные счетчики обоих аналого-цифровых преобразователей управляются от общего синхросигнала, и указанные серии цифровых сигналов передаются к вычислительным средствам от выходов реверсивных счетчиков через управляемые триггеры-фиксаторы.
Примененные в устройстве, выполненном согласно настоящему изобретению, аналого-цифровые преобразователи приращений избавляют от необходимости использования аналоговых фильтров, как описано в известных устройствах. Кроме того, частотные характеристики аналого- цифрового преобразователя приращений могут быть легко установлены путем регулировки частоты синхросигнала.
Дополнительным преимуществом устройства, выполненного согласно настоящему изобретению, является то, что оба сигнала, сгенерированных датчиками, могут дискретизироваться одновременно.
В одном из вариантов выполнения устройства, согласно настоящему изобретению, для формирования управляющего сигнала для триггеров- фиксаторов оно содержит генератор опорной частоты, содержащий компаратор, имеющий соединенный с одним из аналоговых сигналов вход, фазовый детектор, фильтр нижних частот, генератор, управляемый напряжением, включенный последовательно, и бинарный делитель, управляемый указанным генератором, управляемым напряжением и имеющий выход, соединенный с входом фазового детектора. При такой принципиальной схеме частота сигнала, управляющего триггерами - фиксаторами, может быть легко установлена интегральным умножением и может равняться, например, 16-кратному значению резонансной частоты.
Кроме того, каждый из двух аналого-цифровых преобразователей приращений может быть выполнен так, что
где LSB - самый младший (двоичный) разряд реверсивного счетчика;
T - период колебаний синхросигнала;
U - среднеквадратичное значение большего из указанных аналоговых сигналов;
f - частота этого аналогового сигнала.
Устройство, выполненное согласно настоящему изобретению, может содержать вибрационные средства для возбуждения колебаний труб, при этом управление вибрационными средствами производится от сигнала, совпадающего по фазе с суммой возбуждаемых датчиками аналоговых сигналов, что также является преимуществом.
Дальнейшие преимущества изобретения будут более понятны при подробном рассмотрении вариантов предпочтительного выполнения изобретения.
На фиг.1 изображена схема устройства Кориолисова типа, выполненного согласно настоящему изобретению, показывающая узел трубопровода в изометрии, и упрощенная блок-схема устройства обработки сигналов; на фиг.2 - блок-схема варианта выполнения устройства обработки сигналов, изображенного на фиг.1; на фиг. 3 - диаграмма сравнения двух аналоговых сигналов, сгенерированных двумя датчиками, согласно настоящему изобретению.
На чертежах одинаковые номера позиций относятся к одним и тем же элементам.
Примеры осуществления изобретения.
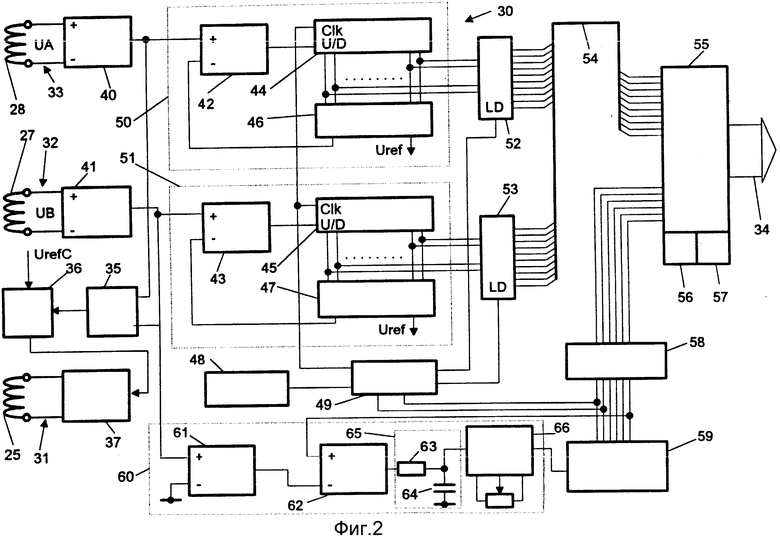
На фиг.1 показан вариант выполнения устройства измерения массового расхода в соответствии с настоящим изобретением, содержащий трубопроводный узел 10 и устройство 30 обработки сигналов. Узел 10, как показано, содержит входную часть 11, выходную часть 12, центральный установочный блок 13 и две выполненных, главным образом, в виде буквы В трубы 14 и 15. Входная часть 11 и выходная часть 12 содержат фланцы 16 и 17 соответственно, предназначенные для установки трубопроводного узла 10 в магистраль, по которой протекает поток жидкости или газа (не показано). Входная часть 11 и выходная часть 12 служат, главным образом, входом и выходом для труб 14, 15 в потоке жидкости и предпочтительно расположены соосно друг относительно друга и соосно относительно продольной оси 18 измеряемого потока жидкости.
Установочный блок 13 образует, в основном, входной канал (не показан), соединенный с входной частью 11, и выходной канал (не показан), соединенный с выходной частью 12. Входной канал образует, главным образом, разделитель потока для разделения потока жидкости, проходящего через установочный блок 13, так, чтобы подавать по существу равные части потока от входной части 11 в каждую из двух параллельных труб 14, 15. Поток проходит через две трубы 14, 15 практически параллельно и одновременно. У соединителя потока в выходном канале образуется одинарный выходной поток и направляется в выходную часть 12.
Труба 14 имеет входной конец 19 и выходной конец 21, жестко прикрепленные к установочному блоку 13. Аналогично, входной конец 20 и выходной конец 22 трубы 15 для потока жестко прикреплены к установочному блоку 13. Две трубы 14 и 15 прикреплены друг к другу двумя держателями 23 и 24, расположенными рядом с соответствующими установочными концами 19, 20 и 21, 22.
Вибратор 25 установлен в положение между двумя по существу прямыми участками труб 14 и 15 с помощью рычага 26 для того, чтобы возбуждать колебания труб 14 и 15 в противофазе друг относительно друга. Датчики 27 и 28 установлены на дугообразных участках труб 14 и 15 так, чтобы измерять перемещения труб 14 и 15 друг относительно друга. Вибратор 25 и датчики 27, 28 могут иметь любую известную в технике форму исполнения.
Устройство 30 обработки сигналов определяет массовый расход через трубы 14, 15 как результат обработки аналоговых сигналов, полученных от датчиков 27 и 28 через проводники 32 и 33 соответственно. Далее устройство 30 обработки сигналов генерирует управляющий сигнал для вибратора 25. Устройство 30 подает сигнал, содержащий значение массового расхода, на свой выход 34.
Очевидно, что несмотря на то, что в описанном варианте выполнения трубопроводного узла использованы В-образные трубы, использоваться могут одна или большее количество трубок почти любого размера и формы, при этом могут возбуждаться колебания трубы или труб относительно оси, расположенной поперек потока жидкости в трубке.
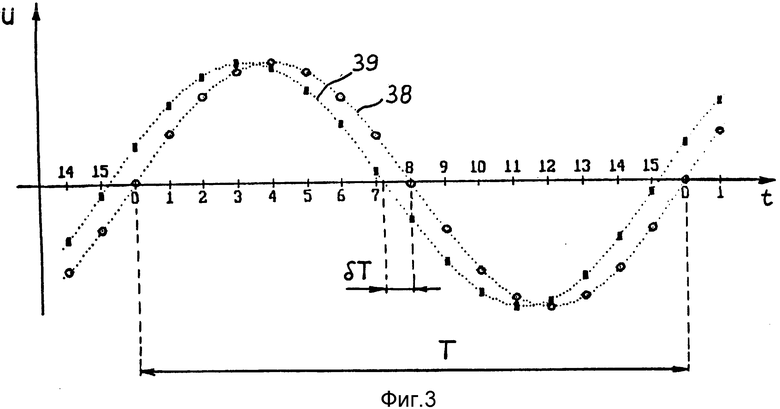
На фиг. 2 изображена блок-схема устройства 30 обработки сигналов. Аналоговые сигналы UA и UB от датчиков 27 и 28 соответственно, поступают на входные каскады 40 и 41 соответственно. Входные каскады 40, 41 усиливают аналоговые сигналы до уровня среднеквадратичного значения примерно в 5 В.
Усиленный аналоговый сигнал на выходе входного каскада 40 подается на вход аналого-цифрового преобразователя 50 приращений, выход которого соединен с управляемым триггером-фиксатором 52. Аналого-цифровой преобразователь 50 приращений содержит входной компаратор 42, реверсивный счетчик 44 и цифроаналоговый преобразователь 46, выдающий одинаковое опорное напряжение Uref. Аналогично, другой аналого-цифровой преобразователь 51 приращений соединен с выходом входного каскада 41 и выход аналого-цифрового преобразователя 51 приращений соединен с другим управляемым триггером-фиксатором 53. Аналого-цифровой преобразователь 51 приращений содержит входной компаратор 43, реверсивный счетчик 45 и цифро- аналоговый преобразователь 47, к которому подается опорное напряжение Uref. Работа аналого-цифровых преобразователей 50 и 51 будет описана со ссылками только на аналого-цифровой преобразователь 50.
Сигнал от входного каскада 40 подается на плюсовой вход компаратора 42, который в свою очередь управляет входом реверсивного счетчика 44. Выходной код счетчика 44 устанавливает выходное напряжение цифроаналогового преобразователя 46. Это выходное напряжение подается на минусовой вход компаратора 42. Компаратор 42 сравнивает два напряжения на его входах и управляет входом реверсивного счетчика 44 так, чтобы обеспечить величину выходного напряжения цифроаналогового преобразователя 46, равную выходному сигналу от входного каскада 40 в любой момент времени. Синхросигнал, необходимый для работы реверсивного счетчика 44, подается от генератора 48 синхросигнала через управляющий логический блок 49. Частота генератора 48 синхросигнала может быть определена из крутизны нулевого перехода выходного сигнала входных каскадов 40, 41 и минимального изменения напряжения (самый младший разряд) аналого- цифровых преобразователей 50, 51. Каждый из аналого-цифровых преобразователей 50 и 51 приращений выполнен так, что
где
LSB - самый младший (двоичный) разряд реверсивного счетчика;
T - период колебаний синхросигнала;
U - среднеквадратичное значение большего из указанных аналоговых сигналов;
f - частота колебаний этого аналогового сигнала.
В предпочтительном варианте значение отношения LSB/T лишь незначительно превышает величину 2•π•U•f .
Выходной код аналого-цифрового преобразователя 50 подается на триггер-фиксатор 52. Дискретизация производится путем запоминания выходного кода триггером-фиксатором 52 в 1 соответствующие моменты времени. В этой цепи аналоговая выборка и удерживающий контур не являются необходимыми. Моменты времени и фазы измерения запоминаются посредством 6-битового триггера-фиксатора 58. Управляющий логический блок 49 управляет входным сигналом триггеров-фиксаторов 52, 53 с учетом фазы сигнала опорного генератора 60. Вычислительный блок 55, снабженный памятью 56 с произвольной выборкой карт и программируемым постоянным запоминающим устройством 57, соединен с триггерами- фиксаторами 52, 53 через шину 54. Вычислительный блок 55 считывает информацию с триггеров-фиксаторов 52, 53 и производит вычисления, соответствующие преобразованию Фурье, которые будут описаны ниже.
Для дискретизации усиленных сигналов служит опорный генератор 60, содержащий соединенный последовательно компаратор 61 нулевого уровня, имеющий вход, соединенный с одним из усиленных сигналов, фазовый детектор 62, фильтр 65 нижних частот, имеющий резистор 63 и конденсатор 64 и управляемый напряжением генератор 66. Выход генератора 66 соединен с входом бинарного делителя 59, имеющего шесть выходов. Выход самого старшего разряда соединен с другим входом фазового детектора 62.
Выходная частота опорного генератора 60 будет установлена по значению, являющемуся целым кратным частоты аналоговых сигналов UA и UB. Рекомендуется устанавливать значение частоты опорного генератора 60, равное четырехкратному значению частоты стробирования, так как в этом случае управляющие сигналы, которые будут нужны для обработки сигналов, также будут присутствовать. Частота стробирования может быть равна шестнадцатикратному значению частоты аналоговых сигналов UA и UB. Этот контроль осуществляется компаратором 61 нулевого уровня, фазовым детектором 62 и фильтром 65 нижних частот. Компаратор 61 нулевого уровня соединен с выходом входного каскада 41. Наиболее важным элементом цепи управления является фазовый детектор 62, на минусовой вход которого подается выходной сигнал от компаратора 61 нулевого уровня, в то время как на плюсовой вход подается сигнал от генератора 66, управляемого напряжением, разделенный по степеням числа 2-бинарным делителем 59. Основываясь на подаваемых на вход сигналах, фазовый детектор 62 определяет фазы двух сигналов и подает заряд с соответствующим знаком на фильтр 65 нижних частот на время, пропорциональное разности фаз. Фильтр 65 преобразовывает заряд в напряжение, которое запоминается до следующего сравнения. Выход фазового детектора находится в режиме высокого сопротивления до тех пор, пока не произойдет новое сравнение. Напряжение от фильтра 65 нижних частот управляет генератором 66, который в свою очередь устанавливает время дискретизации посредством бинарного делителя 59.
На фиг.2 также изображен в предпочтительном варианте выполнения задающий контур вибратора 25, посредством которого устраняются искажения, вызванные воздействием сил Кориолиса. Аналоговый сигнал UA подается через входной каскад 40 к одному из входов суммирующего контура 35, в то время как аналоговый сигнал UB через входной каскад 41 подается на другой вход суммирующего контура 35. Выход суммирующего устройства (контура) 35 соединен с одним входом амплитудного регулятора 36, при этом на его второй вход подается опорное напряжение Urefc соответствующего значения. Амплитудный регулятор 36 усиливает (или ослабляет) сигнал, полученный от суммирующего контура 35 до такой степени, чтобы было установлено желаемое значение входной амплитуды путем регулирования вибратора 25 через силовой блок 37. Окончательно регулятор 36 амплитуды устанавливает величину выходного сигнала суммирующего устройства 35, равную Urefc, которая одновременно дает в результате стабилизацию амплитуды выходного напряжения входных каскадов 40 и 41. Значение Urefc выбрано так, чтобы диапазоны измерения цифроаналоговых преобразователей 46 и 47 могли бы использоваться насколько возможно широко.
Датчики 27 и 28 подают аналоговые сигналы, содержащие сигналы, порожденные силой Кориолиса в противофазах, таким образом эти составляющие сигналов не представлены в сумме двух сигналов, за исключением незначительной величины. Благодаря использованию просуммированного сигнала для управления вибратором 25, трубы 14 и 15 всегда будут совершать колебания со своими резонансными частотами. В дополнение к уменьшенной величине требуемой мощности, этот способ также дает преимущество в том, что точность измерения плотности будет повышена благодаря тому, что значение резонансной частоты используется при вычислении плотности.
Ниже будет объяснен способ обработки сигналов устройства согласно изобретению посредством использования преобразования Фурье. На фиг.3 изображены сигналы UA и UB с номерами позиций 38 и 39 соответственно.
Вибрация труб 14, 15 измерения массового расхода вызывает в датчиках 27, 28 переменные напряжения той же частоты. Задача измерений состоит в точном измерении временного запаздывания между двумя сигналами UA и UB. Периодические сигналы напряжений UA и UB могут быть разложены в ряд Фурье. Ряд Фурье может быть бесконечной длины, однако, вследствие того, что частота силы Кориолиса равна частоте приводной силы, при разложении в ряд Фурье достаточно сохранять только его члены, относящиеся к основной частоте:
UA(ω•t) = a01+a1•cos(ω•t)+b1•sin(ω•t); (1)
UB(ω•t) = a02+a2•cos(ω•t)+b2•sin(ω•t), (2),
где
UA, UB - сигналы напряжений от двух датчиков, представленные в виде первых гармоник разложения в ряд Фурье;
a01, a02 - постоянные составляющие;
a1, a2 - коэффициенты при косинусах;
b1, b2 - коэффициенты при синусах.
Постоянные составляющие сигналов датчиков 27, 28 не несут информации, поэтому нет необходимости их вычислять. Выражения (1) и (2) могут быть переписаны в виде
UA(ω•t) = CA•sin(ω•t+ФА); (3)
UB(ω•t) = CB•sin(ω•t+ФB), (4)
CA, CB - максимальные значения сигналов UA и UB;
tgФА = a1/b1; tgФB = a2/b2 (6)
Из выражений (6):
ФА = arctg (a1/b1); ФB = arctg(a2/b2), (7)
где ФА, ФВ - фазы сигналов UA и UB.
При обработке сигналов массового расхода необходимую информацию несет разность во времени δT между двумя сигналами UA и UB от двух датчиков 27, 28. Эта разность во времени δT может быть вычислена с использованием значений двух фазовых углов и периода
δФ = ФА-ФВ; δT = T•δФ/(2•π) (8)
где
δФ - разность фаз двух сигналов UA и UB, снятых с двух датчиков 27, 28;
δT - разность во времени между сигналами UA и UB;
T - период колебаний значений сигналов UA и UB.
С целью последующей обработки рекомендуется отфильтровать значение разности во времени δt с помощью цифрового фильтра, позволяющего уменьшить погрешность результатов измерения.
При применении описанного способа определяют коэффициенты Фурье a1, b1, a2, b2, используемые в выражениях (6). Эти коэффициенты могут быть определены с использованием приближенного гармонического анализа. С этой целью периодическую функцию делят на 2n равных частей. Вследствие представления данных в двоичной форме, применяемого в цифровых вычислительных устройствах, рекомендуется выполнять разложение по степеням числа 2. При выборе количества частей следует принимать во внимание, что малое количество частей дает грубое представление результатов. С другой стороны, большое количество частей будет ограничено временем, необходимым для вычисления результатов измерений. Принимая в рассмотрение эти аспекты, разложение на 16 частей представляется достаточным, как это показано на фиг. 3. Коэффициенты Фурье определяют с помощью метода наименьших квадратов. Опуская подробное объяснение, выражения для вычисления коэффициентов Фурье будут иметь вид:



где UAi, UBi - значения напряжений сигналов UA и UB, измеренных в момент времени i.
Для обеспечения вычислений значения напряжений обоих сигналов измеряют с равными интервалами. Для образования равных интервалов необходим опорный генератор, работающий с частотой, в 16 раз превышающей частоту входного сигнала. Период колебаний опорного генератора определяет время стробирования для обоих входных сигналов. Коэффициенты ряда Фурье вычисляются с использованием выражений (9) - (12).
Настоящее изобретение может быть выполнено в других конкретных формах без изменения сущности изобретения и, соответственно, для определения объема изобретения во внимание должна приниматься формула изобретения, а не вышеприведенные примеры выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ПОТОКА ТЕКУЧЕЙ СРЕДЫ | 1988 |
|
RU2037782C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ, УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И КОРИОЛИСОВ РАСХОДОМЕР | 2009 |
|
RU2460974C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ, УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И КОРИОЛИСОВ РАСХОДОМЕР | 2009 |
|
RU2456548C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ, УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И КОРИОЛИСОВ РАСХОДОМЕР | 2009 |
|
RU2448330C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ, УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И РАСХОДОМЕР КОРИОЛИСА | 2010 |
|
RU2504737C1 |
| АНАЛИЗАТОР КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1999 |
|
RU2145716C1 |
| ДАТЧИК МАССОВОГО РАСХОДА НА ОСНОВЕ ЭФФЕКТА КОРИОЛИСА (ВАРИАНТЫ) | 2001 |
|
RU2277227C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ В КОРИОЛИСОВОМ МАССОВОМ РАСХОДОМЕРЕ | 1997 |
|
RU2182696C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
| Устройство для измерения флуктуационной составляющей частоты сигналов с линейно-частотной модуляцией | 1988 |
|
SU1631456A1 |
Изобретение относится к устройствам для измерения расхода жидкости или газа при их пропускании непрерывным потоком. Аппарат содержит по меньшей мере одну трубу, совершающую колебания с резонансной частотой в поперечном относительно потока жидкости или газа направлении при протекании потока через трубу, два датчика 27, 28 для получения аналоговых сигналов в соответствии с перемещениями трубы и средства 50, 51 обработки сигналов для преобразования аналоговых сигналов в серии цифровых сигналов и средства 55 для вычисления из серий цифровых сигналов разности во времени с помощью преобразования Фурье. Каждый из аналоговых сигналов, возникающих на датчиках 27, 28, преобразовывается в серию цифровых сигналов с помощью аналого-цифрового преобразователя 50, 51 приращений, содержащего компаратор 42, 43, реверсивный счетчик 44, 45 и цифроаналоговый преобразователь 46, 47. 2 з.п. ф-лы, 3 ил.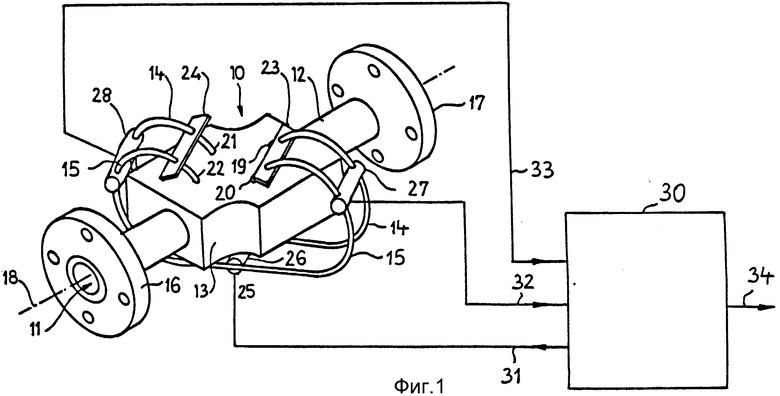

где LSB - самый младший (двоичный) разряд реверсивного счетчика;
T - период колебаний синхросигнала;
U - среднеквадратичное значение большего из указанных аналоговых сигналов;
f - частота этого аналогового сигнала.
| US, патент, 4996871, G 01 F 9/00, 1991. |
