Известны IB протезном деле искусственные механические руки, укрепляемые на культе плеча, состоящие из гильз «плеча и предплечья И кисти. Они «меют сгибальноразгибальные функции в искусственных локте и кисти с поворотом последних Натягивающимися тросами. Последние приводятся в движение телом, ,к которому они прикреплены.
, Предлагаемая рука имеет ту особе-нность, что механизм (протеза с тросами приводится в движение сжатым воздухом, накачиваемым насосом в укрепляемый на поясе или на спине инвалида резервуар, и управляется нажатаем пальцев ног инвалида на педали, монтированные на вкладышах. Эти вкладыщи помещены -внутри обоих ботинок инвалида и соединены с рычагами и тросами, взаимодействующими с щарнирами суставов.
Предлагаемый протез предназначается для инвалида, дпшенного одной или обеих рук при ампутации выше локтя. Безрукий инвалид производит необходимые без посторонней помощи движения, дающие ему возможность брать предметы, принимать пищу и т. д. Конструкция протеза обеспечивает изгиб в локте, изгиб пальцев кисти, сжатие и расжатпе кисти, поворот последней вокруг своей оси. Искусственная рука поднимается частью конечности - культей.
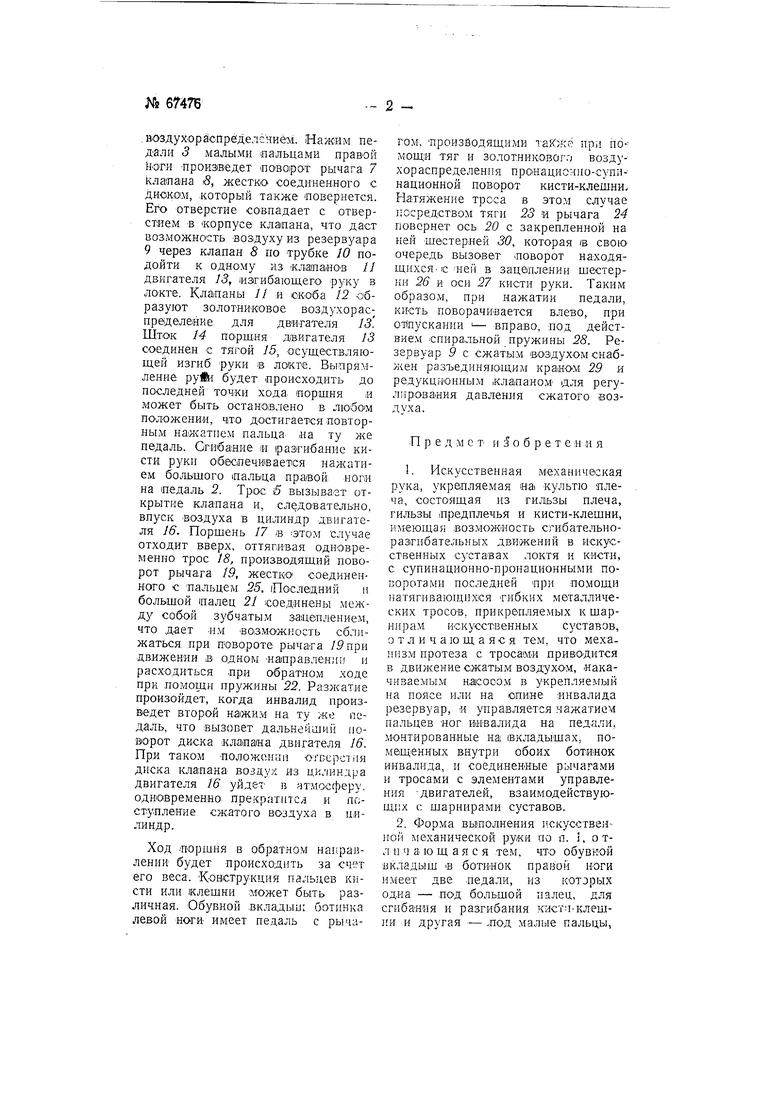
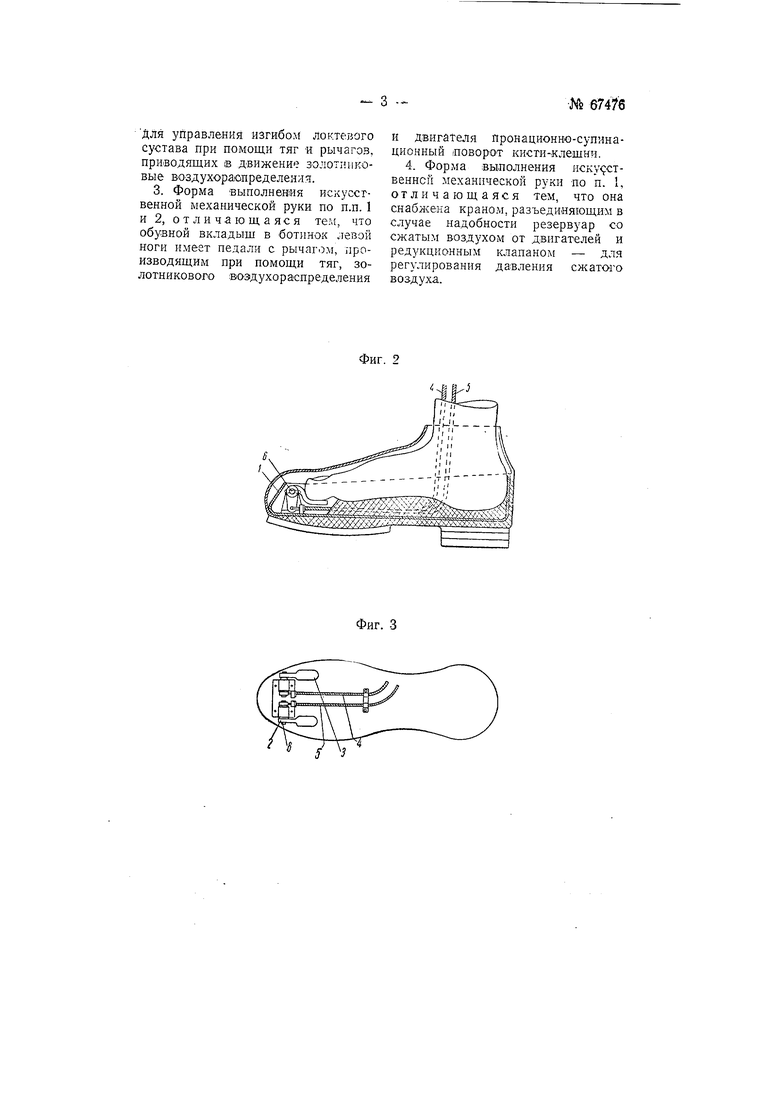
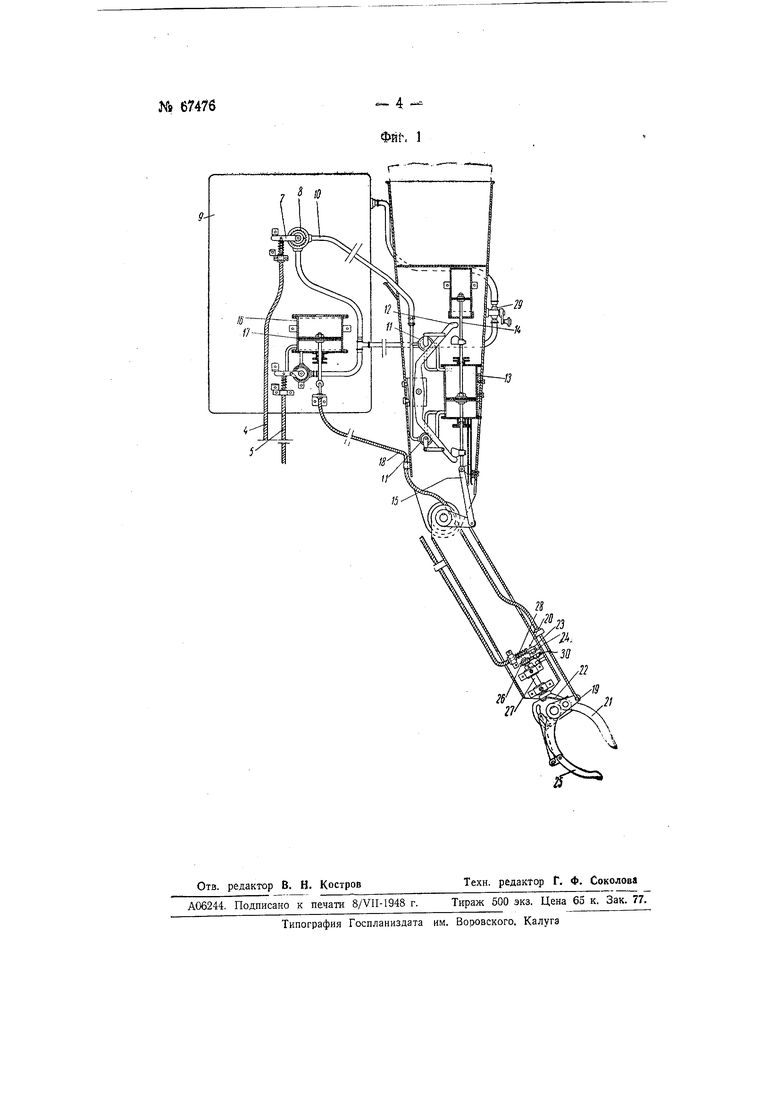
На предлагаемом чертеже фиг. 1 изображает продольный разрез искусственной механической руки, фиг. 2 - продольный разрез обуви с механизмом для управления рукой по фиг. 1, а фиг. 3 - горизонтальный разрез обуви по фиг. 1.
Протез управляется гибкими металлическими небольщого диаметра тросами 4, 5, которые могут быть свободно проп -жены в ботинке, не : -1ешая и не вызывая неудобств йогам. инвалида. В ботинок вкладывается подошва / из лаачого металла, на которой крепится валик 6 с педалями 2.3 и рычага-ми, связанными тросами с возду-щными клапанами. В ботийке правой ноги вкладыш 1 -имеет две педали, из которых одна 2 - под больщой палец - для сгибания и разгибания кисти-клешни и другая 3 - под малые пальцы - для управления изгиб-ом локтевого сустава тягами и рычагами, приводимы-мп в движение золотниковым
.воздухораспрёделЕниём. Нажим педали 3 малыми пальцами правой йоги Произведет поВоро-т рычага 7 кла1пана i5, жестко соединенного с диоко М, .который также повернется. Его отверстие совпадает с отверстием в «корпусе клапана, что даст возможность воздуху из резервуара 9 через клапан 5 по трубке 10 подойти к однОМу из «лаиайОВ 11 двигателя 13, изгибающего руку в лОКте. Клапаны // и скоба 12 образуют золотниковое воздухораспределеиие для дви-гателя 13. Шток 14 поршня двигателя 13 соединен с тягой У5, осуществляющей изгиб руки в локте. Выпрямление pyfei будет происходить до последней точки хода поршня и может быть остано влено в любом положении, что достигается повторным нажатием пальца на ту же педаль. Сгибание и (разгибание кисти рзки обеспечивается нажатием большого пальца правой йоги на педаль 2. Трос б вызывает открытие клапана и, следовательно, впуск воздуха в цилиндр двигателя 16. Поршень 17 .в -этом случае отходит вверх, оттягивая одновременно трос 18, производящий поворот рычага 19, жестко соединенного с пальцем 25, Последний и большой иалец 21 соединены между собой зубчатым Зialцeплeниeм, что дает им возможность сближаться при повороте рычага 75 при движении в одном на)правленин и расходиться при обратном ходе при помощи пружины 22. Разжатие произойдет, когда инвалид произведет второй нажим на ту же педаль, что вызовет дальнейший поBiopoT диска клапана двигателя 16. При таком положанаи огверс1)1я диска клапана воздух из цилиндра двигателя 16 уйдет в чтмосферу. одновременно прекратится и поступление сжатого воздуха в Ц|Илиндр.
Ход .-поршня в обратном нап.раилении будет происходить за счет его веса. Конструкция пальдев кисти или клешни может быть различная. Обувной вкладыи: ботинка левой ноги имеет педаль с рычагом, Производящими ир;; п6-МОЩ1И тяг и золотникового воздухораспределения пронационио-супинационной поворот кисти-клешни. Натяжение трсса в этом случае посредством тяги 23 и рычага 24 повернет ось 20 с закрепленной на ней шестерней 30, которая s свою очередь вызовет поворот находящихся -с ней в зацеплении щестерни 26 и оси 27 кисти руки. Таким образом, при нажатии педали, кисть поворачивается влево, при от1пускании - вправо, под действием спиральной пружины 28. Резервуар 9 с сжатьш воздухом снабжен разъединяющим краном 29 и редукционным клапаном для регулирования давления сжатого воздуха.
Пред м с т и 5 о б р е т е н и я
1. Искусственная механическая рука, украпляемая иа Культю плеча, состоящая из гильзы плеча, гильзы лредплечья и кисти-клещни, имеющая возможность сгибательноразгибательных двИЖений в искусственных суставах локтя и кисти, с супинационно-пронационными поворотами последней -при помощи матягиваюп.1ихся гибких металлических тросов, прикрепляемых к щариирам искусственных суставов, отличающаяся тем, что механизм протеза с тросами приводится в движение сжатым воздухом, накачиваемым насосом в укрепляемый на поясе или на опине инвалида резервуар, и управляется нажатием пальцев яог инвалида на педали, монтированные на вкладышах, помещенных внутри обоих ботинок инвалида, и соединенные рычагами и тросами с элементами управления -двигателей, взаимодействующих с шарнирами суставов.
2. Форма выполнения искусственной механической руки по п. i, о тл и ч а ю щ а я с я .тем, что обувкой :вкладыш в ботиНок правой и-оги имеет две .педали, из которых одна - под больщой палец, для сгибания и разгибания киста-клешни и другая - л-од малые пальцы,
для управления изгибом локтевого сустава при помощи тяг -и рычагов, приводящих в движение золотниковые в-оздухораопределенля.
3. Форма выполнения искусственной механической руки по п.п. 1 и 2, отличающаяся тем, что обувной вкладыщ в ботинок левой ноги имеет педали с рычагом, производящим при помощи тяг, 30лотникового эо-эдухораспределения
и двигателя пронационно-супинационный поворот кисти-клещни.
4. Форма выполнения иску ственнсй механической руки по п. 1, отличающаяся тем, что она снабжена краном, разъединяющим в случае надобности резервуар со сжатым воздухом от двигателей и редукционным клапаном - для регулирования давления сжатого воздуха.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| Протез плеча | 1989 |
|
SU1732967A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| Протез предплечья | 1984 |
|
SU1217403A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Многофункциональный активный протез руки | 1983 |
|
SU1123684A1 |
| Гониометр | 1936 |
|
SU54492A1 |
| Протез руки для культи предплечья | 1964 |
|
SU682231A1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
Фиг. 3
к 67476
