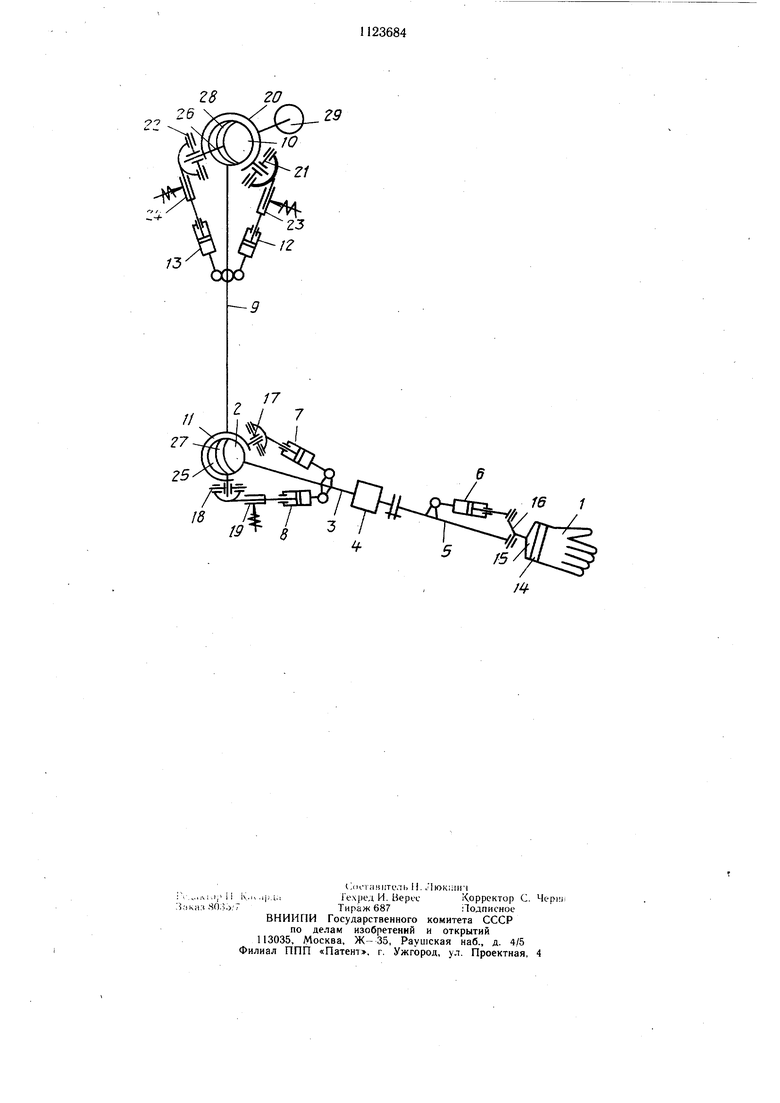
Изобретег-:ие сллосигся к молпиинскоГ технике, i именно к нротезостроению, и может быть использовано в прогезах, предназначенных для протезирования инвалидов после одностороннего или двустороннего вычленения плеча, а также в мапипулятора-.х, где требуется одповременная независимая работа приводов, а То.чже работа со сменным инструментом. Известен многофункциональный протез руки, предназначенный инвалидам с односторонними дефектами верхних конечностей на уровне плеча в верхней трети 1. Недостатками этого протеза являются большая длительность выполнения рабо чих операций из-за наличия только трех активных степеней подвижности, а также невозможность его использования при вычленении плеча. Известен также многофункциональный активный протез руки, который имеет njecTb активных степеней подвижности и содержит блок приводов: сгибания-разгибания, отведения-приведения и ротации плеча, сгибания-разгибания и ротации предплечья, сгибания-разгибания запястья, звенья плеча и предплечья, сферический шарнир плеча, включающий сферу плеча с кольцевой канавкой и фиксатором, установленную в корпусе надплечья, и два двойных шарнира плеча с телескопическими замками расфиксации, локтевой шарнир с корпусом локтя, корпус запястья с рычагом сгибания-разгибания запястья, искусственную кисть со стыковочным узлом и кривошипно-ползунные и кривошипно-кулисные механизмы плеча и предплечья, обеспечивающие независимую работу активных шарниров протеза, а также элементы крепления 2. Однако, использование блока приводов, расположенного в плече и передача движений с выходных валов приводов посредством большого количества промежуточных звеньев требуют увеличения габаритов протеза для размещения этих связей, что приводят к повышению веса конструкции, а гакже и увеличенным люфтам в активных 1парнирах протеза, определяемым суммой люфтов в промежуточных звеньях, участвующих в передаче движения, что приводит к свободному неуправляемому перемец ению кисти в пространстве в пределах этих люфтов. Это снижает точность выполнения операций и делает работу с протезом неудобной для инвалида. Цель изобретения - повышение точности выполнения рабочих операций и уменьшение веса и габаритов протеза. Указанная цель достигается тем, что в многофункциональном активном протезе руки, содержащем звено плеча и звено предплечья со стойкой, корпус запястья с рычагом сгибания-разгибания запястья и искусственную кисть со стыковочным узЛОМ, приводы сгибания-разгибания, отведения-приведения и ротациии плеча, сгибания-разгибания и ротации предплечья, сгибания-разгибания запястья, сферический шарнир плеча, включающий сферу плеча с кольцевой канавкой и фиксаторо.м, установленную в корпусе надплечья, и два двойных шарнира плеча с телескопическими замками расфиксации, локтевой шарнир с корпусом локтя, а также элементы крепления; локтевой шарнир выполнен сферическим и включает сферу локтя с кольцевой канавкой, фиксатор и два двойных шарнира предплечья, корпус локтя закреплен на звене плеча, стойка звена предплечья одним концом закреплена на сфере локтя, а другим - на корпусе привода ротации предплечья, оснащенного выходным валом, при этом приводы сгибания-разгибания и отведения-приведения плеча одними концами шарнирно закреплены на звене плеча, а другими концами посредством телескопических замков расфиксации соединены с двойными шарнирами плеча, приводы ротации п.аеча и сгибания-разгибания предплечья одними концами шарнирно закреплены на стойке, а другими соединены с двойными шарнирами предплечья, причем привод сгибания-разгибания предплечья снабжен локтевым телескопическим замком расфиксации, привод сгибания-разгибания запястья одним концом шарнирно закреплен на выходном валу привода ротации предплечья, а другим - на рычаге сгибания-разгибания запястья. Fia чертеже показана кинематическая схема протеза. Многофункциональный активный протез руки состоит из пневматической кисти 1, звена предплечья, содержащего сферу 2 локтя, стойку 3, привод 4 ротации предплечья с выходным валом 5, приводы 6 сгибания-разгибания запястья, ротации 7 плеча и сгибания-разгибания предплечья 8, звена 9 плеча, содержаще1о сферу 10 плеча, корпус 11 локтя, приводы 12 сгибанияразгибания плеча и отведения-приведения 13 плеча. Все приводы, кроме привода 4 ротации предплечья, выполнены в виде ходовых пневмоцилиндров, а привод ротации предплечья выполнен в виде мо.ментного пневмоцилиндра. Кисть 1 своим стыковочным узлом 14 соединена с корпусом 15 запястья, который шарнирно закреплен на валу 5. Привод 6 сгибания-разгибания запястья одним концом шарнирно закреплен на валу 5, другим - шарнирнг) соединен с рычагом 16 сгибания-разгибания (аняс ья, закрепленным на корпусе 15 запястья. Сгойка 3 соединена с приводом 4 ротации предплечья и сферой 2 локтя, которая подвижно установлена в сферической полости корпуса 11 локтя и образует с ним локтевой сферический шарнир. На корпусе 1 1 локтя установлены двойные и ;1рииры 17 и 18 предплечья. Привод 7 ротации илеча одним концом соединен с- двойным шарниром 17 предплечья, другим - шарнирно закреплен на стойке 3, привод 8 сгибания-разгиба ния предплечья одним концом посредством телескопического замка 19 расфиксации соединен с двойным шарниром 18 предплечья, другим - шарнирно закреплен на стойке 3. Звено 9 плеча соединено с корпусом 11 локтя и сферой 10 плеча, которая подвижно установлена в сферической полости корпуса 20 надплечья и образует с -ним сферический шарнир плеча. На корпусе 20 надплечья установлены двойные шарниры 21 и 22 плеча. Привод 12 сгибания-разгибания плеча одним концом соединен посредством телескопического замка 23 расфикса ции с двойным шарниром 21 плеча, другим - шарнирно закреплен на звене 9 плеча, привод 13 отведения-приведения плеча- одним концом соединен посредство.м телескопического замка 24 расфиксации с двойным шарниром 22, плеча другим - шарнирно закреплен на звене 9 плеча. От произвольного разворота сферы локтя и плеча соответственно 2 и 10 удерживаются с помощью фиксаторов 25 и 26. При этом фиксатор 25 одним концом установлен в корпусе 11 локтя, вдоль оси ротации плеча, с воз.можностью разворота вокруг этой оси, а други.м - подвижно в кольцевой канавке 27, выполненной по образующей 2 локтя в плоскости, совпадающей с плоскостью сгибания-разгибания предплечья, а фиксатор 26 одним концом установлен в корпусе 20 надплечья вдоль оси сгибания-разгибания плеча, с возможностью разворота вокруг этой оси, а другим - подвижно в кольцевой канавке 28, выполненной по образующей сферы 10 плеча в плоскости, совпадающей с плоскостью отведения-приведения плеча. Фланец 29 крепления, соединенный с корпусом 20 надплечья, предназначен для соединения с элементами крепления протеза.
Устройство работает следующим образом.
Перемещение щтока привода 6 обеспечивает посредством рычага 16 сгибания-разгибания запястья качание корпуса 15 запястья и связанной с ним кисти 1. Поворот выходного вала 5 привода 4 обеспечивает ротацию предплечья (пронацию и супинацию). Перемещение щтока привода 7 обеспечивает посредством двойного шарнира 17 предплечья ротацию плеча, т. е. вращение звена предплечья относительно звена 9 плеча. Перемещение щтока привода 8 обеспечивает посредством телескопического замка 19 расфиксации и двойного и1арнира 18 предплечья сгибание-разгибание звена предплечья, т. е. качание относительно оси, перпендикулярно) звену 9 плеча. Диойныо локтевые шарниры 17 и 18 обеспечивают сохранение п.юскости качания приводоп 7 и 8 при .побом произво.1ьном по.южении звена предплечья, чем достигается независимость движений ротации нлоча и сгибания-разгибания предплечья. При этом фиксатор 25, входящий в кольцевую канавжу 27 на сфере 2 локтя, удерживает ее и соответственно звено предплечья, от поворота относительно оси, стойки 3. Перемещение щтока привода 12 обеспечивает посредством телескопического замка 23 расфиксации и двойного шарнира 21 плеча сгибание-разгибание плеча. Перемещение штока привода 13 обеспечивает посредством телескопического замка 24 расфиксации и двойного шарнира 22 плеча отведение-приведение плеча. Двойные шарниры 21 и 22 илеча обеспечивают сохранение плоскости качания приводов 12 и 13 при любом произвольном положении звена плеча, чем достигается независимость движений сгибанияразгибания плеча и отведения-приведения плеча. При этом фиксатор 26, входящий в кольцевую канавку 28 на сфере К) плеча, удерживает ее и соответственно звено 9 плеча от поворота относительно оси звена 9 плеча. При выключенно.м устройстве расфиксации (не показано) телескопические замки 19, 23, 24 расфиксации включеш, т. е. звенья их зафиксированы друг отно сительно друга и перемещение звеньев предплечья и плеча 9 опреде:1яется то.чько перемещением штоков приводов 7, 12, 13.
При включенном устройстве расфиксации телескопические замки .19, 23, 24 расфиксации выключаются, т. е. звенья их расфиксируются и получают возможность перемещения друг относительно друга. Таким образом, звенья 9 предплечья и плеча получают возможность свободного перемещения.
Технико-экономическая эффективность от использования предлагае.мого устройства заключается в уменьшении веса и поперечных габаритов протеза за счет исключения промежуточных зкеньев передачи движений от приводов к щарнпрам протеза Снижен.ие веса протеза у.меньшает нагрузку на инвалида и облегчает ему пользование протезом, а уменьшение поперечных габаритов позволяет выполнить протез в объеме утраченной конечности инвалида. Сокращение количества промежуточных звеньев уменьщает люфты в активных шарнирах. Уменьшение люфтов сокращает объемы неуправляемых перемен ений кисти, чем повышается точность В1 п1олнения рабочих операций и обле1чается все управ.к-ние протезом.
28
7-7
/3
19
6
16 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Многофункциональный активный протез руки | 1980 |
|
SU973121A1 |
| Устройство для разработки движения и суставов верхней конечности | 2021 |
|
RU2766788C1 |
| Многофункциональный активный протезРуКи | 1979 |
|
SU806022A1 |
| Протез плеча | 1960 |
|
SU134820A1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Функционально-косметический протез при вылущении плеча | 1949 |
|
SU86228A1 |
МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ, содержащий звено плеча и звено предплечья со стойкой, корпус запястья с рычагом сгибания-разгибания запястья и искусственную кисть со стыковочным узлом, приводы сгибанияразгибания, отведения-приведения и ротации плеча, сгибания-разгибания и ротации предплечья, сгибания-разгибания запястья, сферический шарнир плеча, включающий сферу плеча с кольцевой канавкой и фиксатором, установленную в корпусе надплечья, и два двойных щарнира плеча с телескопическими замками расфиксации, локтевой шарнир с корпусом локтя, а также элементы крепления, отличающийся тем, что, с целью повышения точности выполнения рабочих операций и уменьшения веса и габаритов протеза, локтевой шарнир выполнен сферическим и включает сферу локтя с кольцевой канавкой, фиксатор и два двойных щарнира предплечья, корпус локтя закреплен на звене плеча, стойка звена предплечья одним концом закреплена на сфере локтя, а другим - на корпусе привода ротации предплечья, оснащенного выходным валом, при этом приводы сгибания- разгибания и отведенияприведения плеча одними концами щарнирно закреплены на звене плеча, а другими концами посредством телескопических замков расфиксации соединены с двойными шарнирами плеча, приводы ротации плеча и сгибания-разгибания предплечья одними концами шарнирно закреплены на стойке, (Л а другими соединены с двойными шарнирами предплечья, причем привод сгибанияразгибания предплечья снабжен локтевым телескопическим замком расфиксации, привод сгибания-разгибвания запястья одним концом щарнирно закреплен на выходном валу привода ротации предплечья а другим на рычаге сгибания-разгибания запястья. к оо О5 сх 4
| I | |||
| Справочник по протезированию | |||
| Под ред | |||
| В | |||
| И | |||
| Филатова | |||
| Л., «Медицина, 1978, с | |||
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3341266/28-13, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
